yolov5 源码 +jupyter notebook 笔记 kaggle
YOLOv5 | Kaggle
直接用的githuab的源码,git clone 后output才有文件
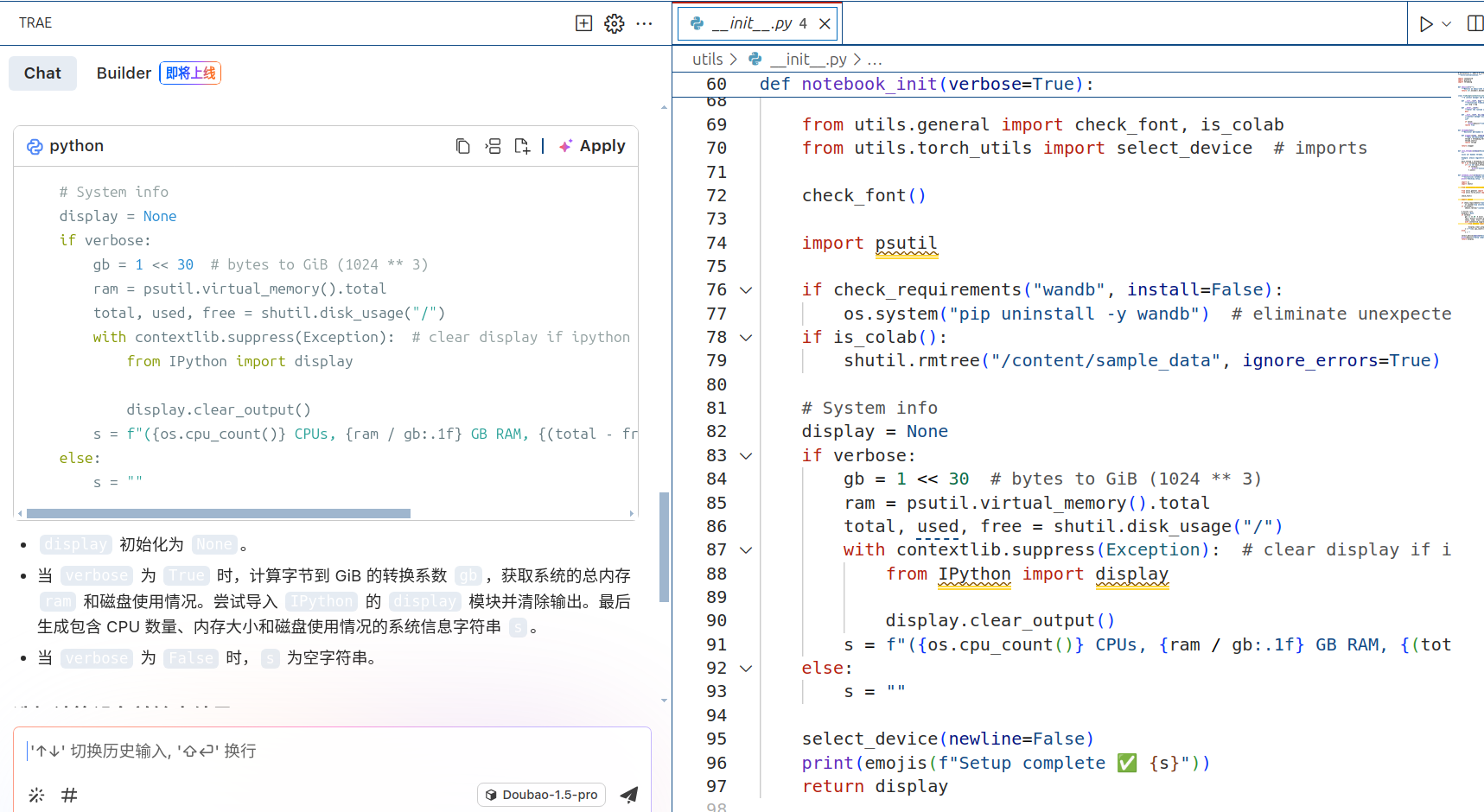
直接gitclone他的源码用Vscode看
好久没见过16g了
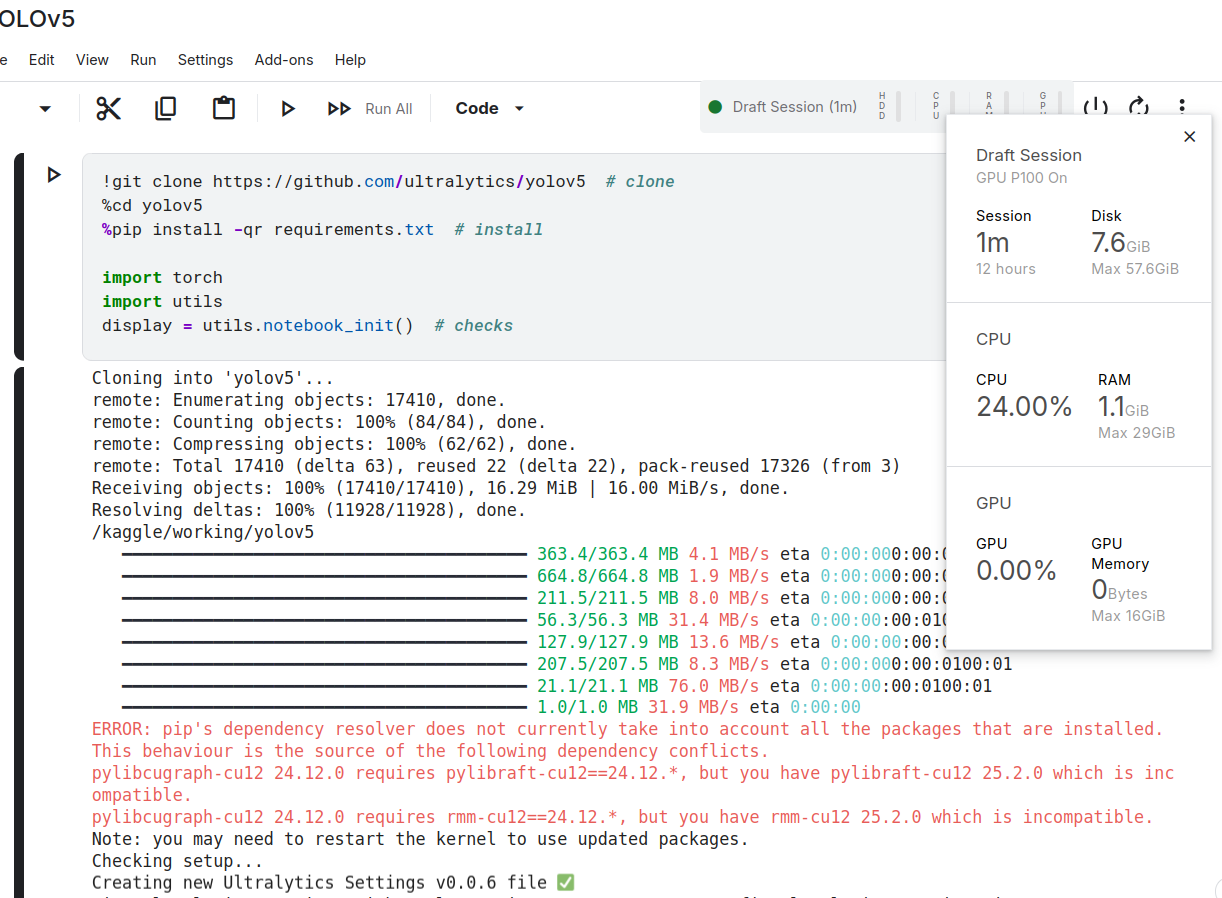
 怎么这么便宜
怎么这么便宜
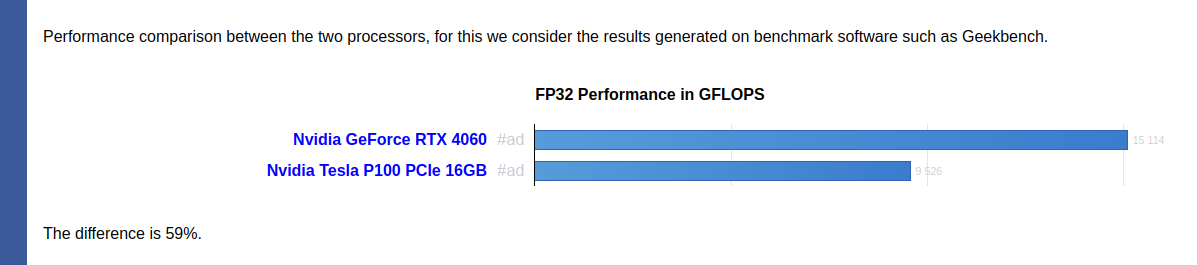
https://gadgetversus.com/graphics-card/nvidia-tesla-p100-pcie-16gb-vs-nvidia-geforce-rtx-4060/#google_vignette
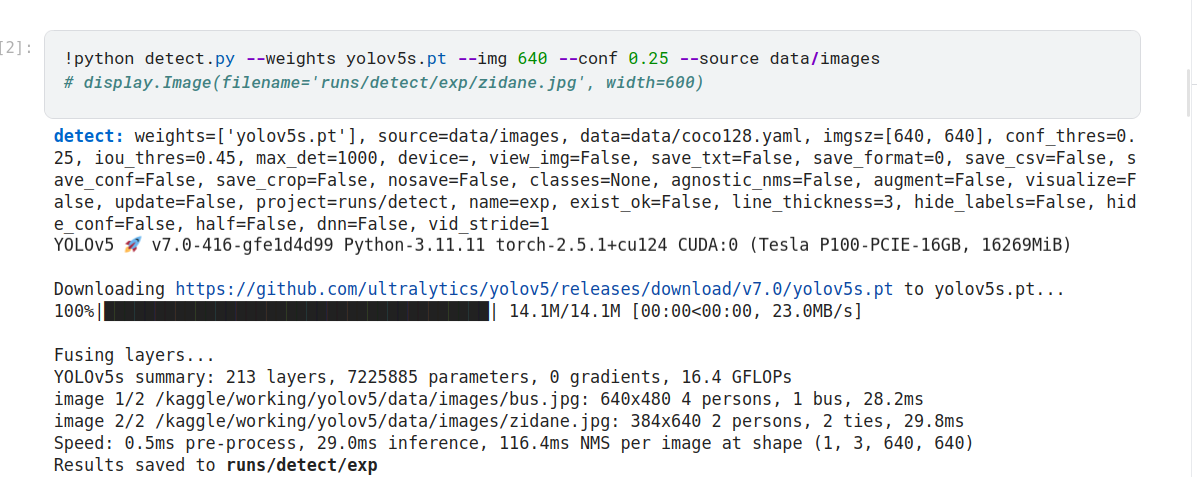
好的,从您提供的信息来看,您正在使用 YOLOv5 进行目标检测任务。以下是运行结果的详细解读:
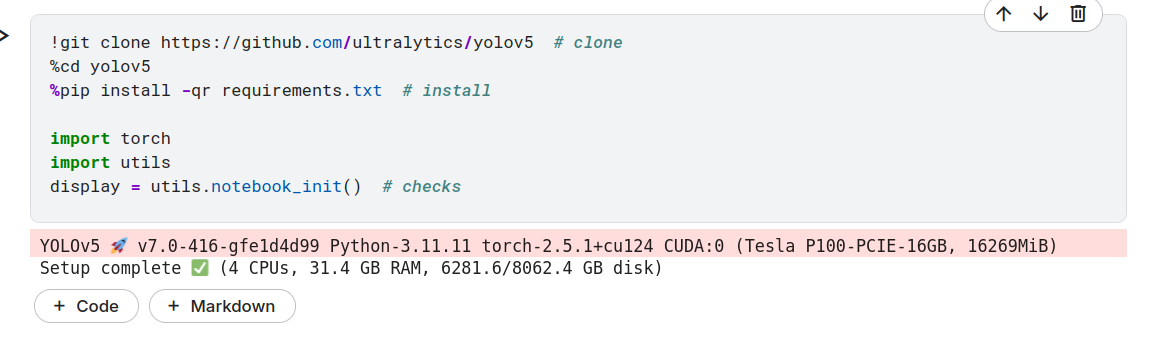
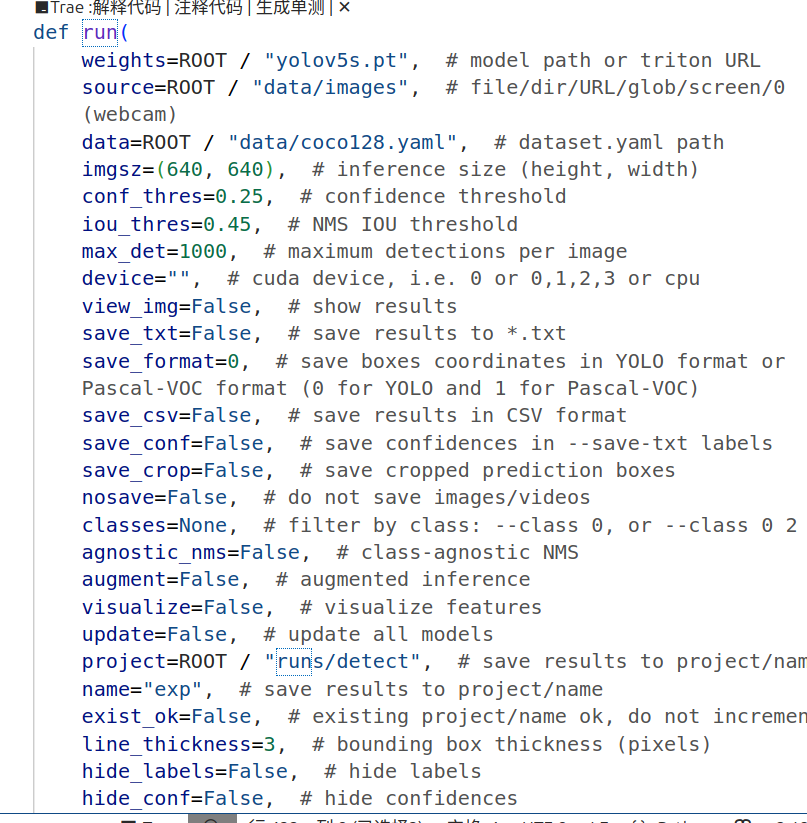
运行配置模型权重: 使用了预训练的 yolov5s.pt 模型(小型版本)。数据源: 图片路径为 data/images。数据集配置文件: data/coco128.yaml。输入图片尺寸: [640, 640](模型会将图片缩放到此尺寸进行推理)。置信度阈值 (conf_thres): 0.25(仅保留置信度高于此阈值的检测结果)。IoU 阈值 (iou_thres): 0.45(用于非极大值抑制 NMS,过滤重叠框)。最大检测目标数 (max_det): 1000。设备: 默认使用 GPU(CUDA:0,Tesla P100-PCIE-16GB)。保存选项:未启用可视化窗口 (view_img=False)。未保存识别结果为文本文件 (save_txt=False)。未保存置信度分数 (save_conf=False)。未保存裁剪的目标图片 (save_crop=False)。其他设置:结果保存路径为 runs/detect/exp。线条粗细为 3 (line_thickness=3)。未隐藏标签和置信度 (hide_labels=False, hide_conf=False)。运行结果模型加载与优化:下载并加载了 yolov5s.pt 模型权重。融合了部分层以优化推理速度。模型总结:层数:213参数量:7,225,885FLOPs:16.4 GFLOPs图片检测:第一张图片:路径: /kaggle/working/yolov5/data/images/bus.jpg尺寸: 640x480检测结果:4 个人 (person)1 辆公交车 (bus)推理时间: 28.2ms第二张图片:路径: /kaggle/working/yolov5/data/images/zidane.jpg尺寸: 384x640检测结果:2 个人 (person)2 条领带 (tie)推理时间: 29.8ms性能指标:预处理时间: 0.5ms推理时间: 29.0msNMS 时间: 116.4ms总体来看,模型在单张图片上的平均推理速度较快。结果保存:检测结果已保存到 runs/detect/exp 文件夹中。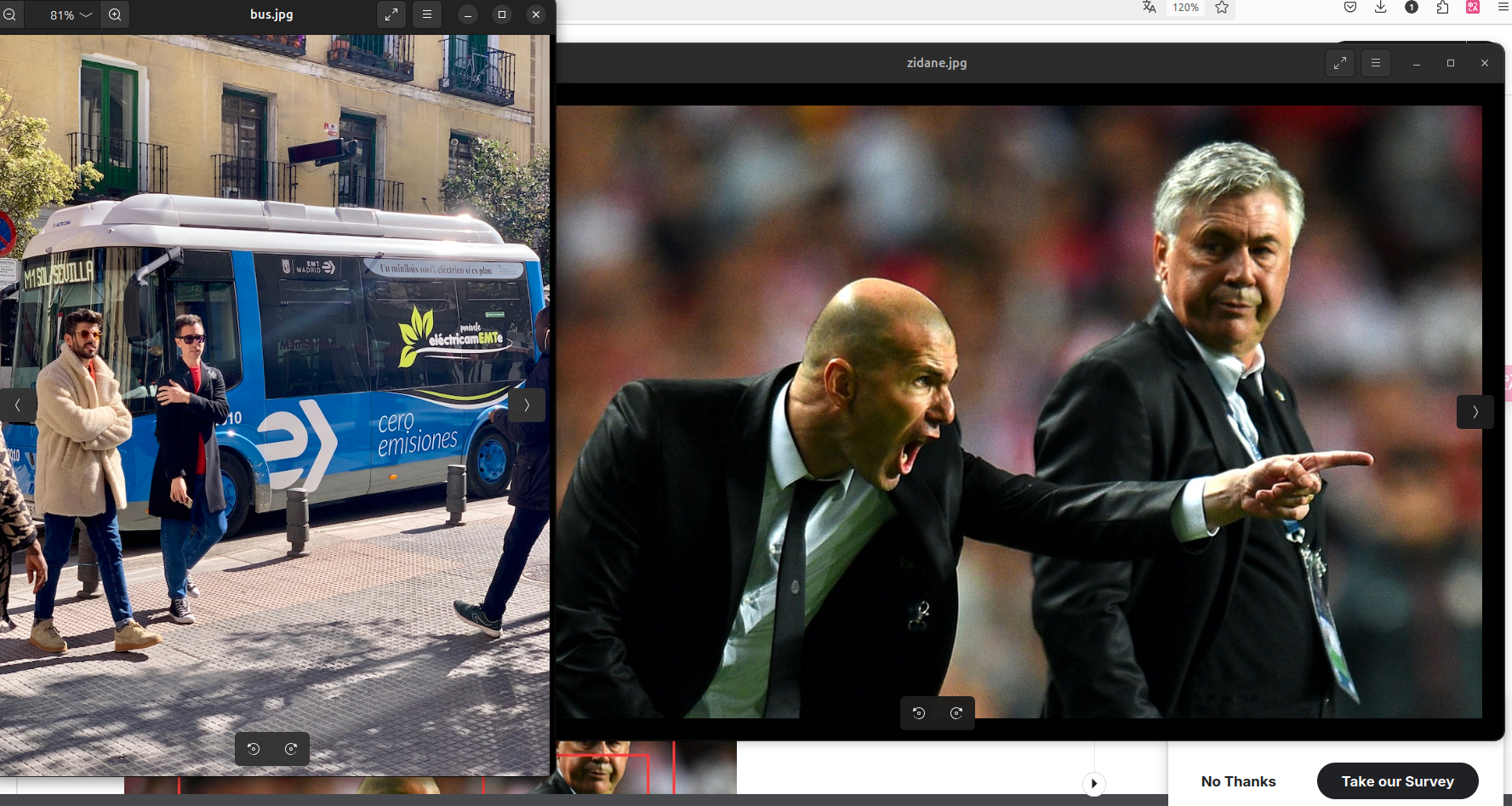
函数输入有一页

推理循环
seen, windows, dt = 0, [], (Profile(device=device), Profile(device=device), Profile(device=device))for path, im, im0s, vid_cap, s in dataset:# 预处理with dt[0]:im = torch.from_numpy(im).to(model.device)im = im.half() if model.fp16 else im.float() # uint8 to fp16/32im /= 255 # 0 - 255 to 0.0 - 1.0if len(im.shape) == 3:im = im[None] # expand for batch dimif model.xml and im.shape[0] > 1:ims = torch.chunk(im, im.shape[0], 0)# 推理with dt[1]:visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else Falseif model.xml and im.shape[0] > 1:pred = Nonefor image in ims:if pred is None:pred = model(image, augment=augment, visualize=visualize).unsqueeze(0)else:pred = torch.cat((pred, model(image, augment=augment, visualize=visualize).unsqueeze(0)), dim=0)pred = [pred, None]else:pred = model(im, augment=augment, visualize=visualize)# 非极大值抑制with dt[2]:pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
对每个输入数据进行预处理、推理和非极大值抑制操作,记录各阶段耗时。
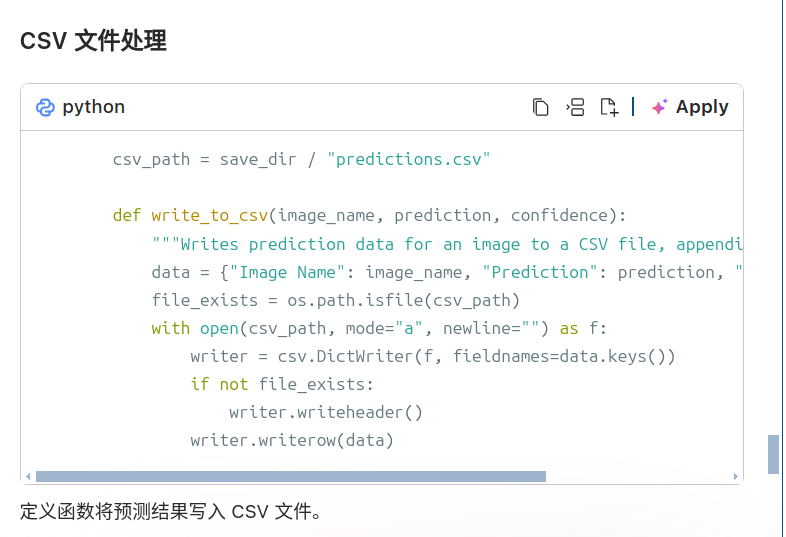
# Process predictionsfor i, det in enumerate(pred): # per imageseen += 1if webcam: # batch_size >= 1p, im0, frame = path[i], im0s[i].copy(), dataset.counts += f"{i}: "else:p, im0, frame = path, im0s.copy(), getattr(dataset, "frame", 0)p = Path(p) # to Pathsave_path = str(save_dir / p.name) # im.jpgtxt_path = str(save_dir / "labels" / p.stem) + ("" if dataset.mode == "image" else f"_{frame}") # im.txts += "{:g}x{:g} ".format(*im.shape[2:]) # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhimc = im0.copy() if save_crop else im0 # for save_cropannotator = Annotator(im0, line_width=line_thickness, example=str(names))if len(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_boxes(im.shape[2:], det[:, :4], im0.shape).round()# Print resultsfor c in det[:, 5].unique():n = (det[:, 5] == c).sum() # detections per classs += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string# Write resultsfor *xyxy, conf, cls in reversed(det):c = int(cls) # integer classlabel = names[c] if hide_conf else f"{names[c]}"confidence = float(conf)confidence_str = f"{confidence:.2f}"if save_csv:write_to_csv(p.name, label, confidence_str)if save_txt: # Write to fileif save_format == 0:coords = ((xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist()) # normalized xywhelse:coords = (torch.tensor(xyxy).view(1, 4) / gn).view(-1).tolist() # xyxyline = (cls, *coords, conf) if save_conf else (cls, *coords) # label formatwith open(f"{txt_path}.txt", "a") as f:f.write(("%g " * len(line)).rstrip() % line + "\n")if save_img or save_crop or view_img: # Add bbox to imagec = int(cls) # integer classlabel = None if hide_labels else (names[c] if hide_conf else f"{names[c]} {conf:.2f}")annotator.box_label(xyxy, label, color=colors(c, True))if save_crop:save_one_box(xyxy, imc, file=save_dir / "crops" / names[c] / f"{p.stem}.jpg", BGR=True)# Stream resultsim0 = annotator.result()if view_img:if platform.system() == "Linux" and p not in windows:windows.append(p)cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])cv2.imshow(str(p), im0)cv2.waitKey(1) # 1 millisecond# Save results (image with detections)if save_img:if dataset.mode == "image":cv2.imwrite(save_path, im0)else: # 'video' or 'stream'if vid_path[i] != save_path: # new videovid_path[i] = save_pathif isinstance(vid_writer[i], cv2.VideoWriter):vid_writer[i].release() # release previous video writerif vid_cap: # videofps = vid_cap.get(cv2.CAP_PROP_FPS)w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))else: # streamfps, w, h = 30, im0.shape[1], im0.shape[0]save_path = str(Path(save_path).with_suffix(".mp4")) # force *.mp4 suffix on results videosvid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))vid_writer[i].write(im0)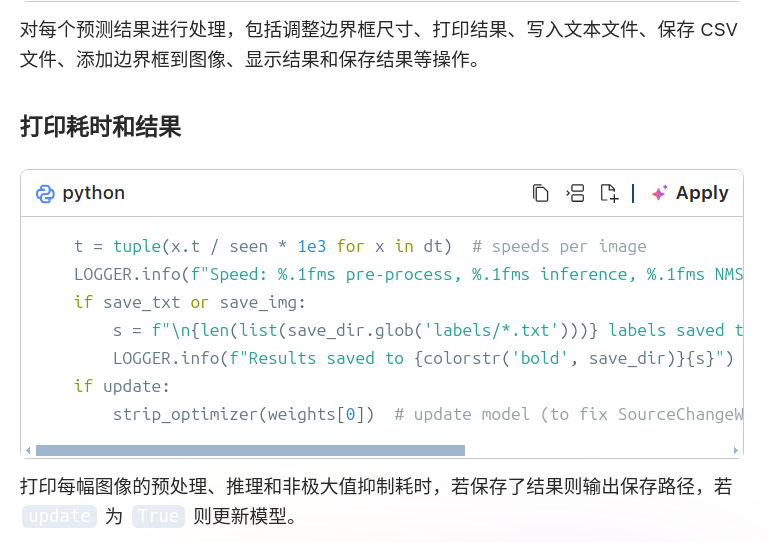
 明天看训练部分
明天看训练部分