因泰立H13激光雷达赋能垃圾发电厂,炉渣体积测量与装车智能化
近日,因泰立科技交付垃圾发电厂炉渣体积测量及自动装车方案,该方案使用 H13三维轮廓扫描激光雷达实现体积测量及料渣的自动装车功能,代替人工装车。

在该方案实际应用当中,H13 提供了一套成熟的算法,可对外提供车斗位置数据、垃圾渣位置、体积等数据. 在自动装车方面,激光雷达装在停车区域上方,检测车厢的长宽高和XY坐标点,对接天车程序控制抓手进行装车。

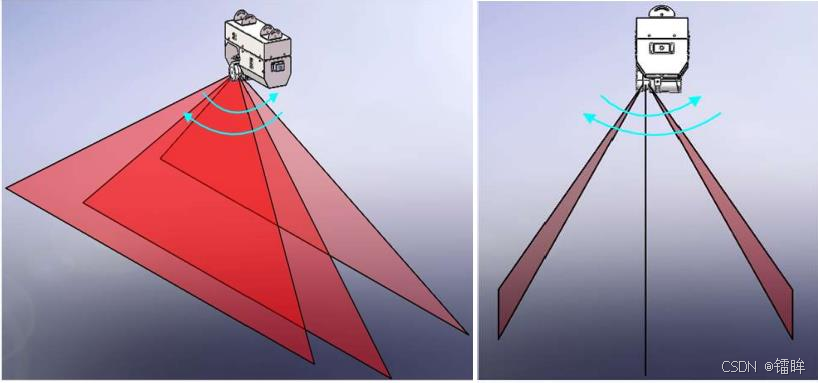
H13 三维轮廓扫描激光雷达是基于二维激光雷达配合伺服电机的方式,可扫描覆盖180°*160°(可调节)的三维大视野,后台搭配专业的激光点云计算软件,可直接输出外尺寸体积、特征坐标、三维点云图片等信息。
H13 三维轮廓扫描激光雷达特点
·成熟的车辆轮廓检测算法。多年专注于车辆外廓检测技术,可以通过外廓特征定位车辆位置, 测量车辆指定部位尺寸,输出环境坐标,配合机械手臂动作。
·测量车斗长宽高,用于计算车斗可装载物料的体积。
·实时定位车斗前后位置,指导车辆停到指定的位置。
·实时测量车辆下料是否装满,多用于石料装载及粮食装载情景。
·成熟的物料体积测量算法。检测指定区域内的物料货物,可输出货物高度、体积、检测时间等特征信息。
·无人值守;7*24 小时运行,维护简单,使用寿命长。