从盲区到全域:黎阳之光视频孪生+AI智能算法驱动智慧机场三维感知革命
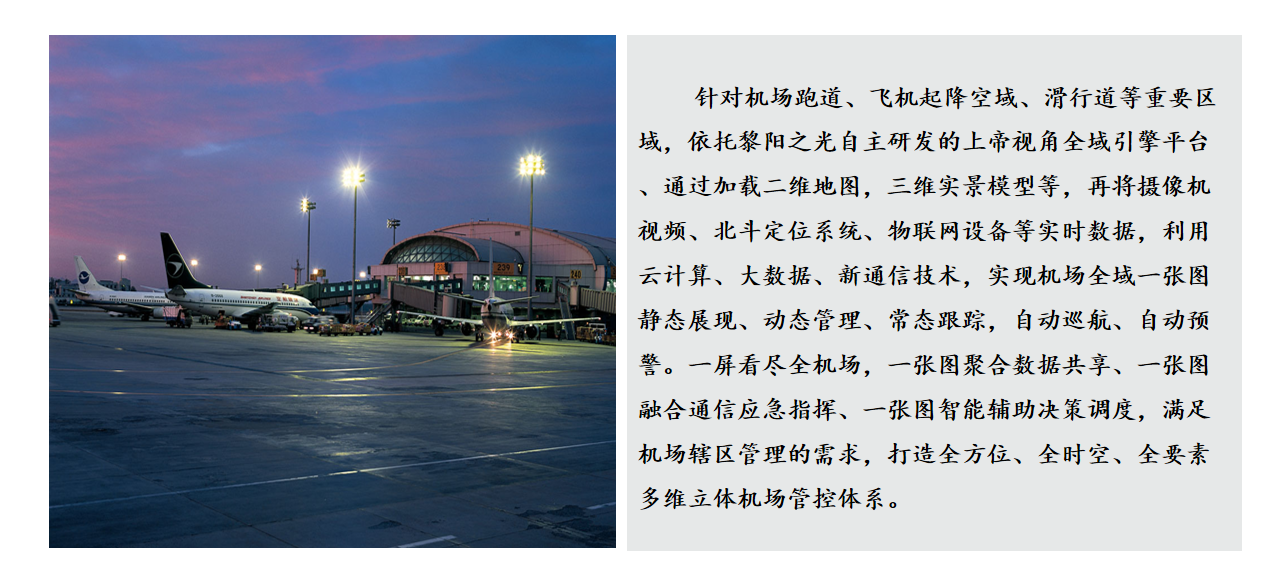
在民航业高速发展的今天,机场作为交通枢纽的复杂度持续攀升 —— 日均数百架次航班起降、数千辆地面保障车辆穿梭、数万旅客流转,传统依赖 “人工监控 + 经验调度” 的模式已难以应对 “安全零容错、效率最大化” 的核心需求。黎阳之光以视频融合为感知基石、数字孪生引擎为核心载体、AI 算法为智能中枢的三维感知技术体系,正掀起一场智慧机场的 “空间革命”,彻底破解滑行区、跑道、登机口的空间感知盲区与调度难题。

一、技术底层:从 “碎片化感知” 到 “三维全穿透”
传统机场的空间感知长期存在三大痛点:一是数据孤岛,监控摄像头、雷达、GPS 等设备各自为战,视频画面割裂、数据格式不兼容;二是空间盲区,航站楼立柱、廊桥阴影、滑行道拐角等物理遮挡,导致 “看得见的地方重复看,看不见的地方没人看”;三是虚实脱节,物理空间的动态变化无法实时映射到调度系统,决策滞后于实际场景。
三维感知技术体系通过 “三步走” 实现突破:
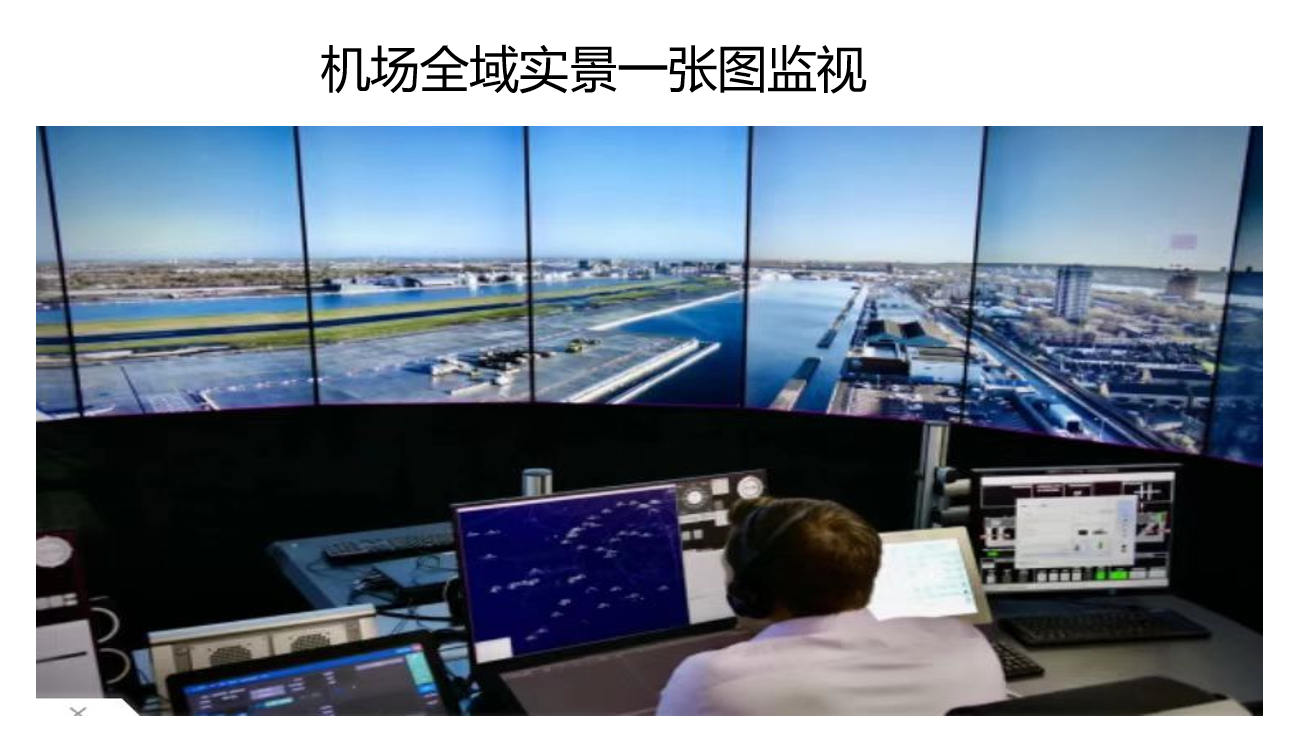
- 视频融合打底:通过畸变校正、视角拼接、时空同步算法,将机场全域数千路监控视频(含固定摄像头、移动车载镜头、无人机航拍等)整合成 “无拼接缝、无时间差” 的全景画面,填补物理遮挡形成的盲区,构建 “一张图” 式的视觉感知底座。
- 孪生引擎抬头:基于激光点云、BIM 模型构建 1:1 还原的机场三维数字孪生体,将视频融合数据、物联网传感器(如飞机 ADS-B 信号、车辆北斗定位、人员 RFID)实时接入,实现物理空间与虚拟空间的 “毫秒级映射”,让调度人员 “一屏观全域、一图知全情”。
- AI 算法赋能:通过目标检测(识别飞机、车辆、人员)、轨迹预测(推算运动路径)、冲突预警(判断潜在碰撞风险)、调度优化(生成最优作业序列)四大核心算法,将 “被动监控” 升级为 “主动决策”,让数字孪生体从 “可视化工具” 变为 “智能大脑”。

二、场景落地:三大核心区域的 “痛点破解术”
(一)滑行区:破解 “地面迷宫” 的协同难题
滑行区是机场最复杂的 “动态路网”—— 飞机、地勤车(加油车、行李车、除冰车)、摆渡车在此交叉作业,传统依赖塔台指令和司机经验,易因 “信息差” 导致拥堵或剐蹭。
三维感知技术通过三重手段优化:
- 全要素动态追踪:视频融合技术消除滑行道拐角、停机位遮挡盲区,AI 算法实时标记每架飞机(含航班号)、每辆车(含车型、任务)的位置与速度,孪生引擎在虚拟空间生成 “动态热力图”,直观显示拥堵点。
- 冲突智能预警:基于历史数据训练的 AI 模型,可预测 10 分钟内可能发生的路径交叉(如飞机滑行与加油车穿行),提前 3 分钟向塔台和车辆终端推送预警(“CA1234 预计 2 分钟后进入 E 滑行道,与您的加油车路径冲突”)。
- 路径动态优化:当某滑行道临时封闭,孪生引擎快速模拟多条替代路径,结合飞机尺寸(宽体机需避开窄道)、任务优先级(急救航班优先),自动推荐最优路线,比人工规划效率提升 40%。
(二)跑道:筑牢 “空中生命线” 的安全防线
跑道是航班起降的核心区域,任何异物(FOD,如碎石、零件)、人员闯入或误入侵都可能引发灾难性事故。传统依赖人工巡检和定点监控,存在 “巡检间隙盲区” 和 “夜间识别弱” 的问题。
三维感知技术实现 “全域、全时、全量” 防护:
- 全域无死角监控:通过沿跑道布设的高清红外摄像头(覆盖白天与黑夜)、毫米波雷达(穿透雨雾),视频融合后生成 “跑道全景带”,孪生引擎实时标记 FOD 位置(精度达 0.5 米)、鸟群聚集区等风险点。
- 入侵实时拦截:AI 算法可在 0.3 秒内识别闯入的人员、车辆或无人机,联动孪生引擎定位具体坐标(“距跑道北头 300 米处发现不明人员”),同时触发声光报警和安防系统,引导巡逻车快速处置。
- 起降协同校验:结合航班进近数据(如高度、速度),孪生引擎在虚拟空间模拟飞机着陆轨迹,与跑道实际状态(如是否有积雪、道面摩擦系数)比对,提前提示塔台 “当前跑道状态适合 A330 着陆,需缩短 100 米滑跑距离”。
(三)登机口:化解 “最后一公里” 的效率瓶颈
登机口是旅客体验的 “最后一环”,常因 “航班准点率波动”“旅客扎堆排队”“地勤作业延迟” 导致登机混乱。传统依赖人工广播和纸质调度表,响应滞后。
三维感知技术实现 “人、机、场” 协同优化:
- 旅客流预判疏导:通过航站楼内摄像头的视频融合数据,AI 算法实时统计前往某登机口的旅客数量与行进速度,孪生引擎在虚拟空间预测 “15 分钟后将有 200 人到达,超过廊桥承载量”,自动触发广播引导(“前往 32 号登机口的旅客,可先至休息区等候,10 分钟后开始登机”)。
- 地勤作业节拍管控:将行李车、客梯车、清洁队的作业进度接入孪生引擎,AI 算法根据航班计划生成 “地勤作业时序表”(如 “清洁队需在 15:00 前完成机舱清理,行李车 15:05 前完成装载”),超时未完成则向调度终端亮灯警示。
- 弹性资源调度:当某航班因天气延误,孪生引擎快速模拟 “登机口调整方案”—— 基于后续航班计划、旅客换乘需求,推荐最优替代登机口(如 “原 28 号登机口可调整至 30 号,步行距离增加 50 米,但不影响后续 3 班航班”),并同步更新航显屏与 APP 信息。
三、价值革命:从 “被动应对” 到 “主动进化”
三维感知技术体系的落地,已在国内多个枢纽机场显现显著价值:
- 安全维度:某国际机场应用后,FOD 发现效率提升 80%,地面车辆剐蹭事故下降 65%,跑道入侵响应时间从 5 分钟缩短至 1 分钟;
- 效率维度:航班滑行平均耗时减少 12 分钟,登机口周转效率提升 25%,单日可多承载 8-10 架次航班;
- 成本维度:地勤车辆空驶率下降 30%,人工监控人力成本减少 40%,年运营成本节约超千万元。
未来,随着 5G + 边缘计算的普及,三维感知将向 “更实时、更智能、更泛在” 进化 —— 不仅覆盖机场核心区域,还将延伸至行李分拣、货运区、航站楼安防等场景,最终实现 “全流程自主决策” 的智慧机场新范式。这场由视频融合与孪生引擎驱动的三维感知革命,正重新定义民航业的 “安全与效率边界”。