海康机器人3D相机的应用
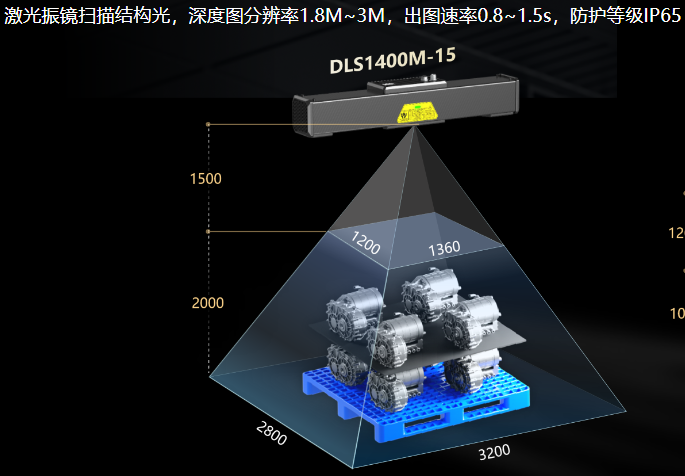
海康3D相机为基于振镜的双目结构光立体相机,型号为MV-DLS1400P,该相机的主要参数为

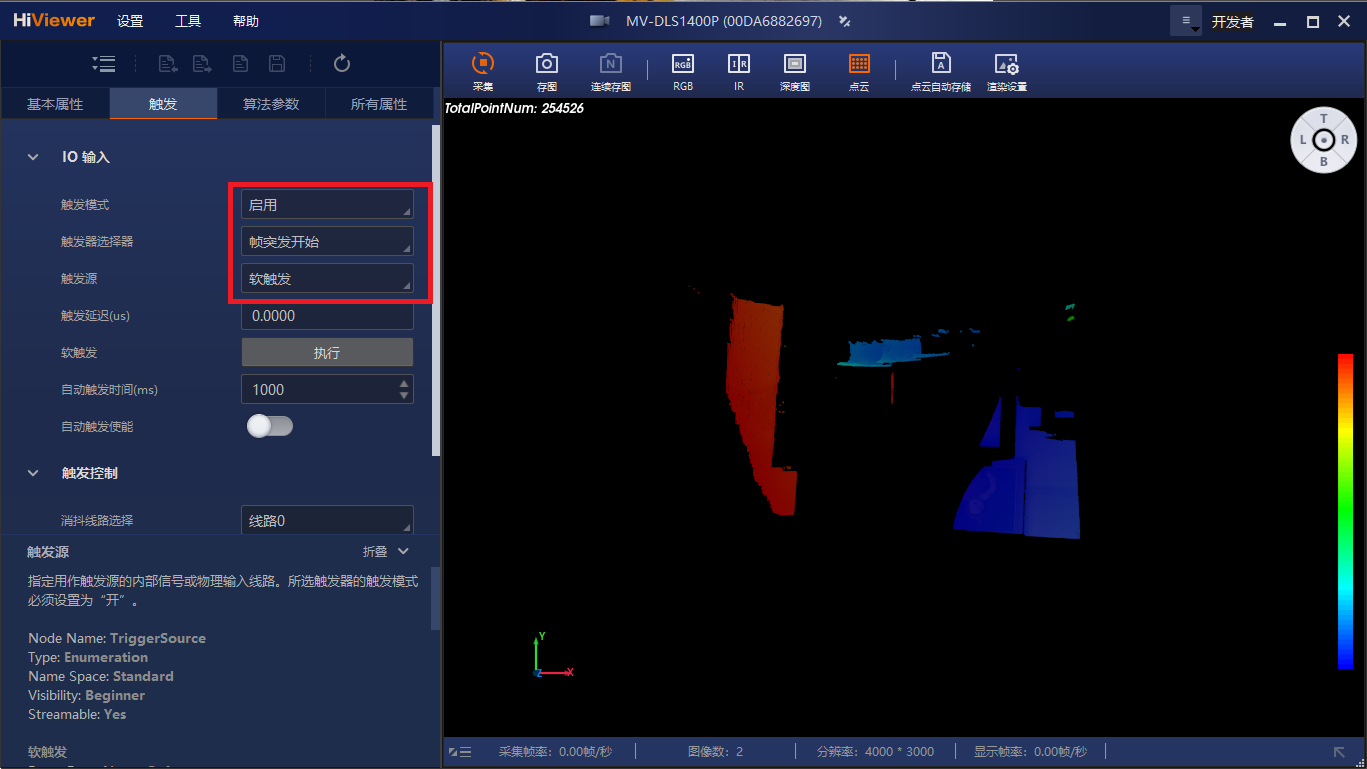
相机客户端软件为HiViewer,注意触发的IO设置如下:
采集的点云密度较大,且需要转换为独立的点云X、Y、Z三个变量,比较费时间。如何加速是比较重要的问题。
解决方法
(1)通过OpenMP并行加速
(2)点云数据降采样
对应的代码如下
omp_set_num_threads(16);
#pragma omp parallel for
int j=0;
for (int i = 0; i < nPointNum; i+=5)//降低分辨率:采样部分点云3 4 5倍降采样
{hvX[j]=cloud[i].x = pSrcValue[i * 3 + 0];hvY[j]=cloud[i].y = pSrcValue[i * 3 + 1];hvZ[j]=cloud[i].z = pSrcValue[i * 3 + 2];j++;
}