智能座舱软件架构设计的宏观决策框架
本文从车载座舱软件架构师的视角出发,构建了一个以功能需求为主导,质量属性、约束条件和技术趋势协同优化的宏观决策框架。目的在于将传统架构设计方法与新兴技术趋势及严苛行业标准进行深度融合,为智能座舱软件架构的可持续发展提供了理论与实践指导。
一 功能需求主导的架构设计方法论
功能需求作为智能座舱软件架构设计的首要驱动力,直接决定了系统的核心价值与用户体验。在智能汽车时代,座舱功能已从基础的信息娱乐扩展至涵盖人机交互、车辆控制、生态服务等多元领域,呈现出高度复杂化和快速迭代的特点。作为架构师,必须建立系统化的功能需求分析方法,将用户期望转化为可实现的架构设计方案。
需求分类与优先级划分
智能座舱的功能需求可划分为三个层次:基础功能、增值功能和创新功能。基础功能包括音频播放、蓝牙电话、基础导航等传统车载信息娱乐功能,是座舱系统的"必备项";增值功能如多屏互动、智能语音助手、场景化服务等,构成了产品差异化的关键;创新功能则涵盖AR-HUD、3D交互、数字孪生等前沿体验,代表技术领先性。
优先级划分需综合考虑用户价值、技术可行性和商业目标。采用Kano模型分析表明,基础功能属于"必备属性",其缺失会导致用户极度不满;增值功能属于"期望属性",实现程度与用户满意度成正比;创新功能则属于"魅力属性",能带来惊喜体验。在实践中,我们建议采用"核心-扩展-前瞻"的迭代开发策略:优先确保基础功能的稳定实现,再逐步扩展增值功能,最后探索创新功能。
SOA架构下的原子化服务设计
为应对功能需求的多样性和可变性,面向服务架构(SOA)已成为智能座舱软件设计的行业共识。与传统基于信号的静态交互模型不同,SOA架构将系统功能分解为独立的原子化服务,通过标准化接口进行通信和组合。研究表明,SOA架构可使导航和媒体播放模块的ECU资源占用率降低48.28%,显著提升系统效率。
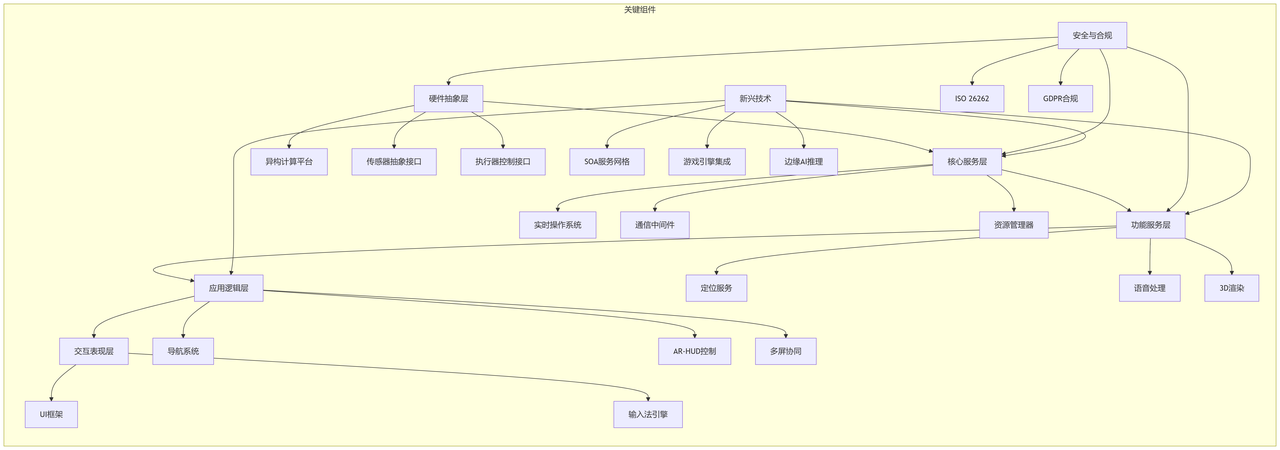
原子化服务设计需要遵循高内聚、低耦合原则。如图1所示的智能座舱SOA架构中,导航数据服务被细分为位置获取、路径规划、交通信息等原子服务,每个服务负责单一功能,通过服务网关进行解耦和互联5。这种设计带来的优势显而易见:首先,各服务可独立开发、部署和更新,大大缩短了新功能的上市时间;其次,服务复用率显著提高,例如同一"语音识别服务"可同时支持导航指令输入和音乐播放控制;最后,系统扩展性增强,新增功能只需组合现有服务或添加少量新服务,无需重构整体架构。
服务接口标准化是SOA成功实施的关键。华为HiCar SDK定义了严格的接口规范,包括通信协议(强制支持USB 2.0+或Wi-Fi Direct 5GHz)、数据格式(AES-256加密)和性能指标(投屏延迟≤200ms)4。在欧盟市场,还需额外满足IPv6协议(RFC8200)兼容性和多语言界面(英/德/法切换)要求。架构师需确保各原子服务的接口设计符合这些行业标准,同时预留足够的扩展空间以适应未来需求变化。
表:导航数据服务模块的原子化分解示例
| 原子服务 | 功能描述 | 接口标准 | 性能要求 |
| 位置获取服务 | 提供GPS定位数据 | HTTP/REST, 200OK响应 | 定位误差≤5米 |
| 路径规划服务 | 计算最优行驶路线 | Protobuf序列化 | 响应时间<500ms |
| 交通信息服务 | 获取实时路况更新 | gRPC流式传输 | 更新延迟<2s |
| 地图渲染服务 | 生成可视化地图 | WebSocket二进制流 | 帧率≥30fps |
场景驱动的动态服务组合
现代智能座舱需要根据用户场景动态调整功能组合,这要求架构支持运行时服务发现与绑定。基于SOA的智能座舱操作系统可通过以下步骤实现场景自适应:获取用户需求场景信息→判断车辆执行条件→确定目标服务→下发场景控制指令。例如,当系统检测到车辆进入停车场时,可自动组合"环视摄像头服务"、"AR导航服务"和"停车支付服务",提供一体化的停车体验。
场景驱动的架构设计需要上下文感知和策略引擎的支持。上下文感知负责收集用户身份、地理位置、车辆状态等信息;策略引擎则根据预定义规则(规则引擎)或机器学习模型,决定服务的组合方式和执行流程。大众集团CARIAD团队开发的个性化系统能够根据VIN码、驾驶员档案和车辆类型实时调整界面布局和功能组合,大幅提升了用户体验一致性。值得注意的是,场景适配必须平衡个性化与安全性,特别是在驾驶过程中,应避免复杂交互导致的分心。大众采用"分心感知"的响应式布局设计,确保界面变化同时满足易用性和安全标准。
二 质量属性,约束条件,技术前沿维度
质量属性
质量属性作为智能座舱软件架构设计的第二维度,直接决定了系统的可靠性、安全性和用户体验。与功能需求不同,质量属性往往表现为非功能性要求,各属性之间存在复杂的相互制约关系。优秀的架构设计需要在性能、安全、可靠性等关键质量属性之间找到最佳平衡点,而非追求单一属性的极致优化
质量属性的权衡最终服务于用户体验目标。架构师需要建立可量化的体验指标,如任务完成时间、错误率和用户满意度评分,并通过A/B测试验证不同设计选择的影响。值得注意的是,某些质量属性(如安全性)的提升可能以牺牲便利性为代价,这时需要遵循ALARP(As Low As Reasonably Practicable)原则,将风险降低至合理可行的最低水平,而非绝对消除。例如,驾驶过程中限制复杂交互是必要的安全措施,但可通过语音快捷命令部分弥补功能可达性的损失。
约束条件
约束条件构成了智能座舱软件架构设计的边界框架,深刻影响着技术选型和实现路径。与功能需求和品质属性不同,约束条件往往来自外部环境,架构师需要准确识别并创造性应对这些限制。智能座舱面临的主要约束包括合规性要求、硬件限制和成本压力三大类,它们共同塑造了架构设计的可行域
成本控制是商业化产品的核心约束。华为HiCar认证的年度续证费用为首年20%-30%(约2万-4.5万/年),硬件升级(如新增5G模块)还需额外5万-30万投入7。在架构层面降低成本的关键是提高复用率:大众集团通过Kotlin Multiplatform实现代码跨平台复用,节省50%开发成本3;华为建议同平台后续型号认证费用可降至首款40%,周期缩短至60%7。另一个策略是功能分级,基础版满足认证最低要求,高端版通过软件解锁增值功能,实现硬件平台统一。
商业模式影响架构决策方向。前装市场(OEM)与后装市场(导航仪/HUD)对架构的要求截然不同:前装需深度集成车辆总线,支持多屏协同(如奥迪、宝马合作车型),认证周期长但溢价高1;后装侧重快速适配主流车型,华为HiCar后装设备认证费仅8万-15万,可豁免整车测试4。架构师需根据目标市场调整设计重心,前装强调可靠性和扩展性,后装则突出兼容性和成本效益。
技术趋势
技术趋势作为智能座舱软件架构设计的加速器,不断为系统创新注入新的可能性。与相对稳定的功能需求和约束条件不同,技术趋势具有更强的动态性和颠覆性。作为架构师,需要敏锐识别那些具有战略价值的新兴技术,评估其成熟度与适用性,并将其有机融入架构设计中。当前影响智能座舱发展的关键技术趋势包括3D渲染引擎、跨平台框架、边缘AI和云-端协同等方向
本地AI能力成为新一代座舱的标配。语音唤醒(≥98%成功率)、驾驶员状态监测、手势识别等智能交互均依赖高效的边缘推理4。与传统云计算相比,边缘AI具有低延迟、隐私保护、离线可用等优势,特别适合车载场景。架构设计需考虑模型部署、运行时管理和硬件加速三个维度:使用ONNX等开放格式封装模型;通过容器或虚拟机隔离不同AI服务;利用NPU/GPU加速关键算子。
场景智能是AI技术的更高阶应用。基于SOA的智能座舱操作系统能够动态组合原子服务,实现"上车自动续播家中未看完的视频"等连贯体验2。这类场景需要多模态感知(身份、位置、日程等)和智能决策支持。架构层面,建议采用"感知-推理-执行"三层模型:感知层融合传感器数据生成上下文;推理层通过规则引擎或机器学习模型生成决策;执行层调用相应服务组合。为降低延迟,可将轻量级模型部署在座舱本地,复杂模型运行在车载计算平台或边缘节点。
最后
智能座舱作为"第三生活空间"的地位日益巩固,其软件架构设计的重要性将持续提升。本文提出的宏观决策框架并非一成不变的教条,而是需要根据技术演进和市场变化动态调整的指导原则。随着自动驾驶技术成熟,座舱与驾驶域的深度融合将带来新的架构挑战;元宇宙概念的兴起可能重新定义车载交互范式。唯有坚持用户价值为本、技术创新为翼、质量安全为基,才能设计出经得起时间考验的优秀架构,推动智能汽车产业健康发展。