计算机视觉(opencv)——图像本质、数字矩阵、RGB + 基本操作(实战一)
OpenCV 入门教程:
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,广泛应用于图像处理、视频分析、机器学习等领域。
在 Python 中,cv2 是 OpenCV 的主要接口模块。本文将带你一步步掌握 cv2 库的安装与基本图像处理功能。
图像的本质:像素的数字矩阵
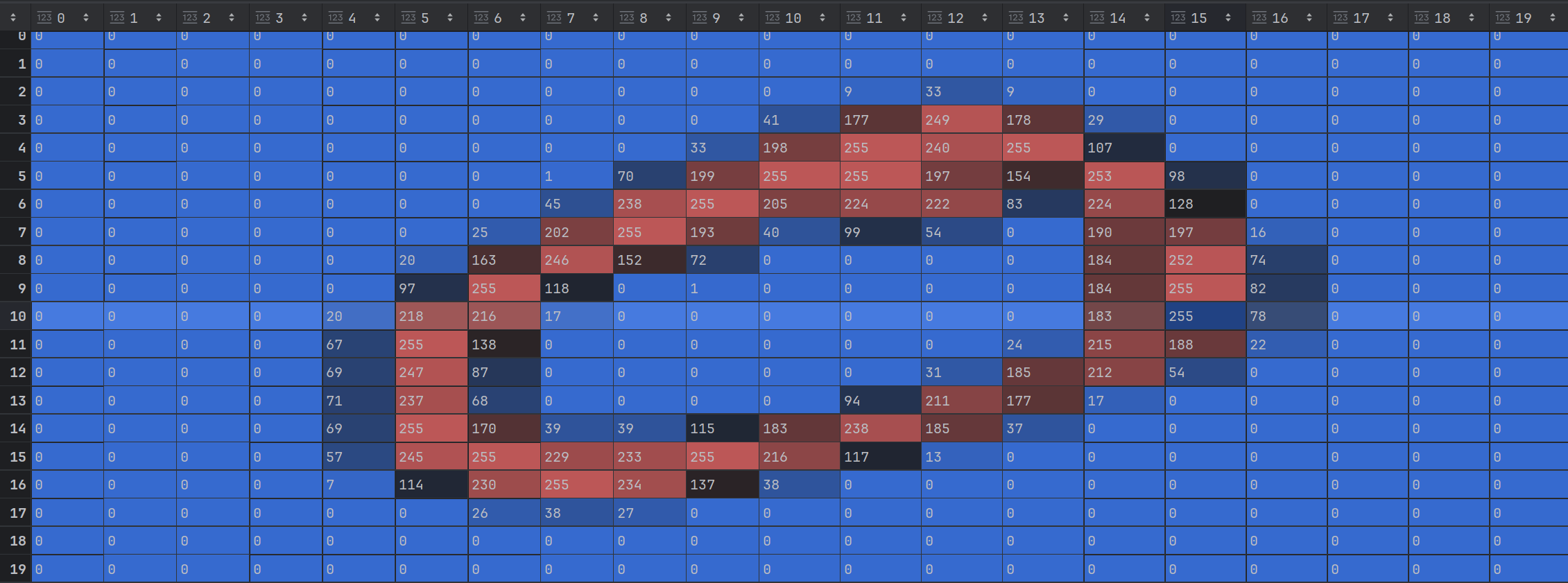
任何数字图像(如照片、截图、手写数字图片)都是由无数个微小的 “像素点”(Pixel)组成的
-
每个像素点的数值含义:
- 对于灰度图(如代码中的手写数字),每个像素用一个 0-255 的整数表示亮度:0 代表纯黑,255 代表纯白,中间值表示不同深浅的灰色。
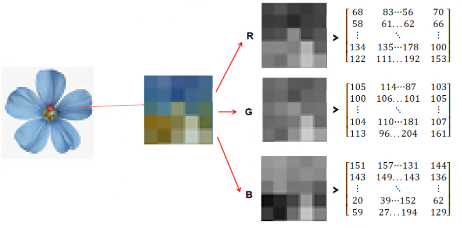
- 对于彩色图(如 RGB 格式),每个像素由三个数值(R、G、B)组成,分别对应红、绿、蓝三种颜色的亮度,组合后呈现出各种颜色。
彩色图的单个像素点:[0-255,0-255,0-255]:
如:[123, 85, 34]↑ ↑ ↑B G R
在 OpenCV 中默认是 BGR,而不是 RGB灰度图示例:

什么是RGB(Red, Green, Blue):
光学三原色(RGB):红、绿、蓝
通过将红色(R)、绿色(G)、蓝色(B)三种颜色以不同强度组合,形成各种颜色。
| R | G | B | 颜色 |
|---|---|---|---|
| 255 | 0 | 0 | 红色 |
| 0 | 255 | 0 | 绿色 |
| 0 | 0 | 255 | 蓝色 |
| 255 | 255 | 255 | 白色 |
| 0 | 0 | 0 | 黑色 |
| 255 | 255 | 0 | 黄色 |
百度搜索 “RGB调色板” ,我们通过调色来具体对比来看看:
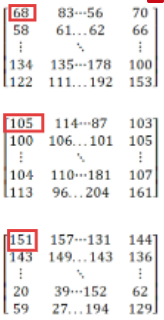
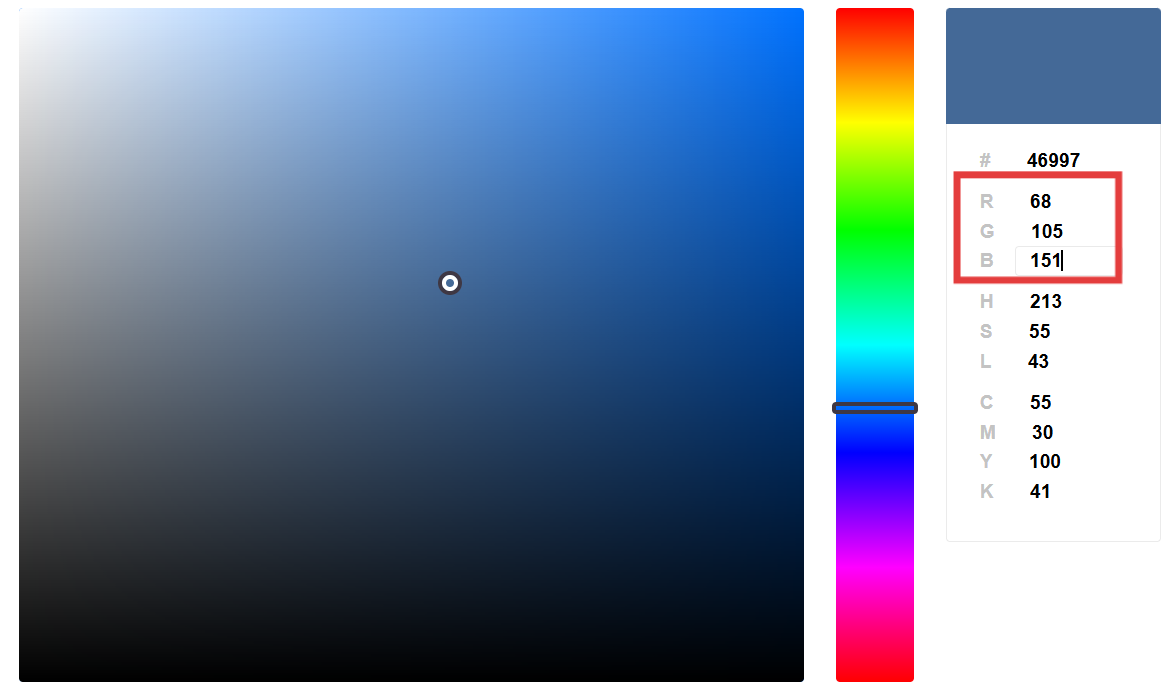
将第一个像素对应的R、G、B输入调色板后得到的颜色 与 像素切片篇左上角的像素颜色 相同:


注意:这里的三个数组并不是直接 print(image) 打印出来的结果。
print打印出来的结果是
而是分离通道:(本文章第七节会教,此处有印象即可)
B = img1[:, :, 0] # 蓝色B通道
G = img1[:, :, 1] # 绿色G通道
R = img1[:, :, 2] # 红色R通道或者:
B, G, R = cv2.split(img1)得到被分开的R、G、B的单独的颜色数据,同时数据的位置对应每个像素的位置。
一、安装 OpenCV 并查看版本
安装命令
pip install opencv-pythonpip install opencv-contrib-python
⚠️ 注意:
opencv-contrib-python是包含更多实验性模块和扩展功能的版本,如果你需要 SIFT、SURF 等模块,可安装:
安装完成后,可以通过如下方式验证 OpenCV 是否成功安装:
import cv2
print("OpenCV 版本:", cv2.__version__)
二、读取与显示图像(解析图像的矩阵)
完整图片(可保存):(或者直接百度搜索企鹅,在点开图片栏,应该第一个或第二个就是)

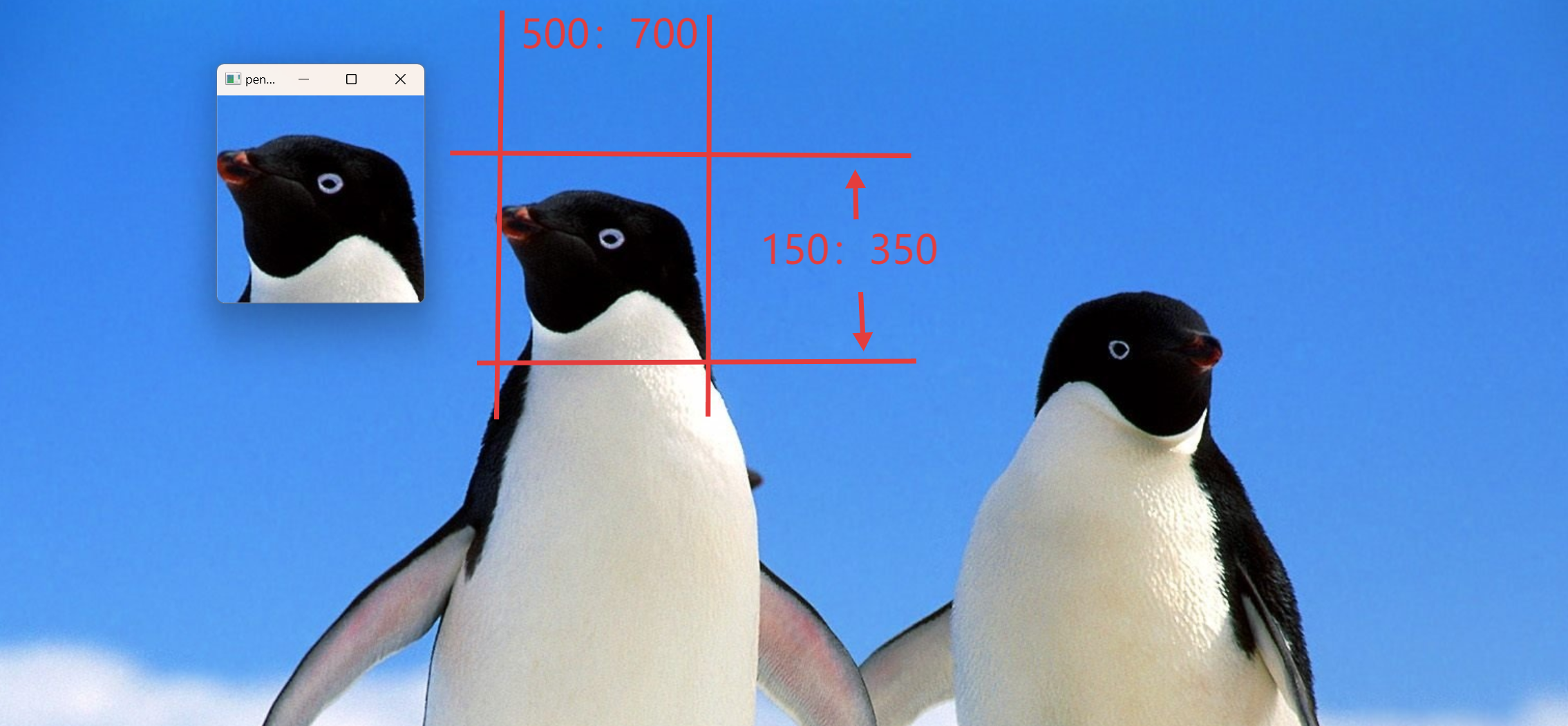
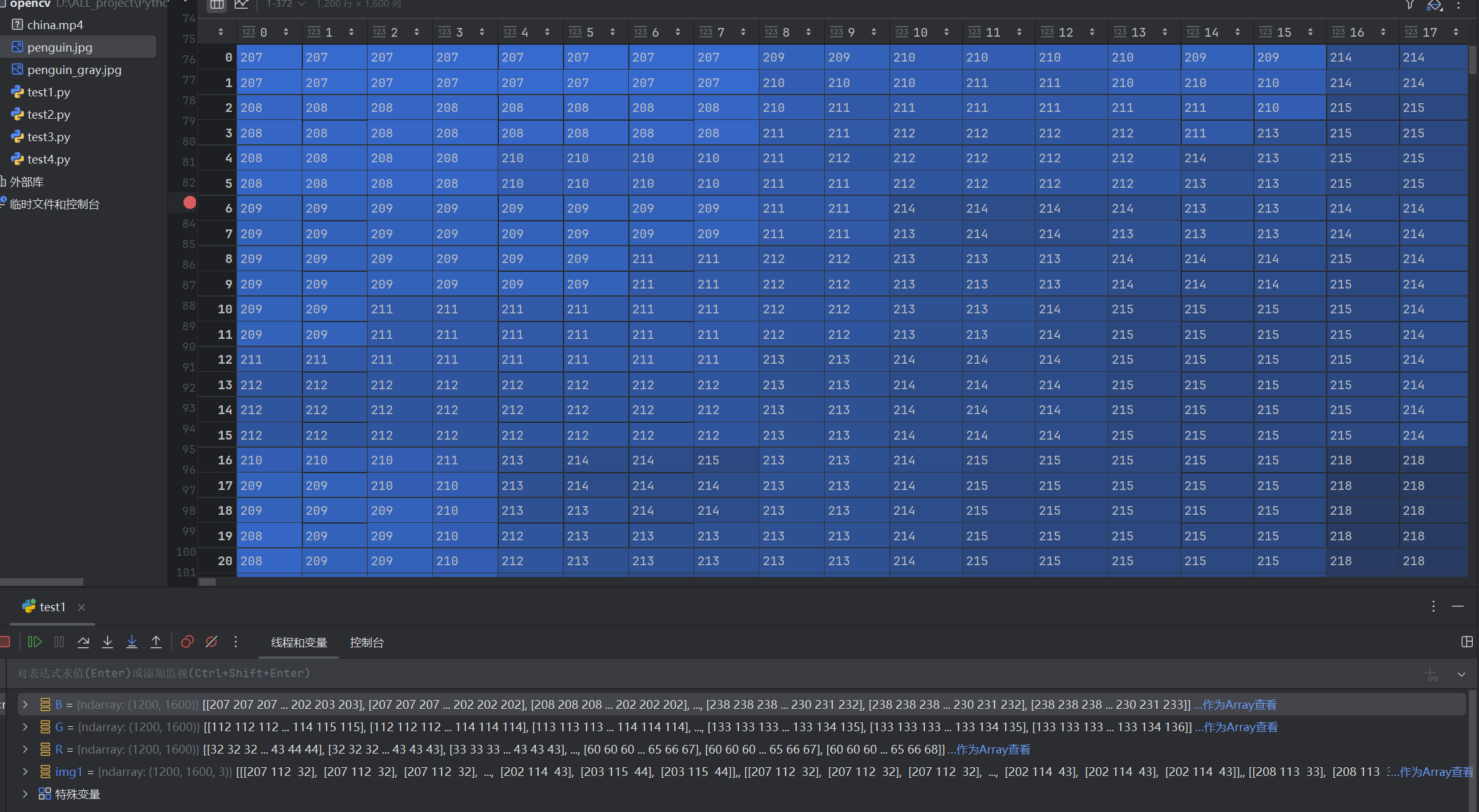
该图片的第一行的数字矩阵:
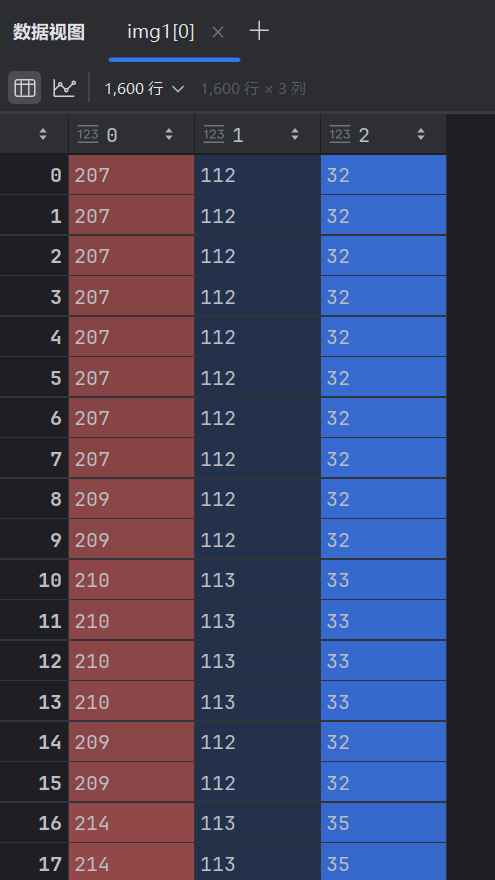
可以看到数字矩阵有1600行,3列
1600表示这个图片一行有1600个像素点
3表示每个像素点的BGR的数字组成
import cv2
img = cv2.imread("penguin.jpg")
# print(img) #打印图片的数字矩阵(设置断点,调试时可以更直观)cv2.imshow('qie',img)
a = cv2.waitKey(5000) # 展示5秒时间(参数为0:一直执行,需要按键关闭)
print(a) # 如果按下按键,获取按键的ascll码值
cv2.destroyAllWindows() # 关闭所有打开的窗口并释放所有相关内存。print("图像形状(shape):",img.shape)
print("图像数据类型(dtype)",img.dtype)
print("图像大小(size)",img.size)说明:
-
cv2.imread():读取图像。 -
cv2.imshow():展示图像窗口。单引号‘’内为标题 -
cv2.waitKey(ms):等待键盘事件,单位为毫秒。若为0,表示一直等待。 -
cv2.destroyAllWindows():关闭所有窗口。 -
img.shape:返回图像的尺寸(高度, 宽度, 通道数)。
结果:
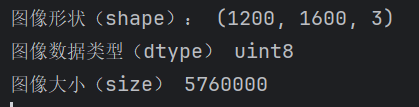
图像形状(shape):(1200, 1600, 3)
| 数字 | 含义 |
|---|---|
1200 | 图像的高度(行数)= 有 1200 像素行 |
1600 | 图像的宽度(列数)= 有 1600 像素列 |
3 | 每个像素有 3 个通道(通常为 BGR 或 RGB) |
该图像是一个 彩色图像(3通道),大小为 1600(列)×1200(行) 像素,使用的是 BGR 色彩空间(在 OpenCV 中默认是 BGR,而不是 RGB)。
图像数据类型(dtype): uint8
-
uint8是 无符号 8 位整数(unsigned int 8)。 -
每个像素的每个通道用一个字节(8 位)来表示。
-
取值范围是 0 ~ 255。
图像大小(size) 5760000
-
shape为(1200, 1600, 3):-
高度(行数):1200 像素
-
宽度(列数):1600 像素
-
每个像素有 3 个颜色通道(B、G、R)
-
-
dtype为uint8(每个通道值占 1 字节)
那么:
size = 1200 × 1600 × 3 = 5760000
所以,这个图像共有 5760000 个像素值(也可以理解为字节数)。
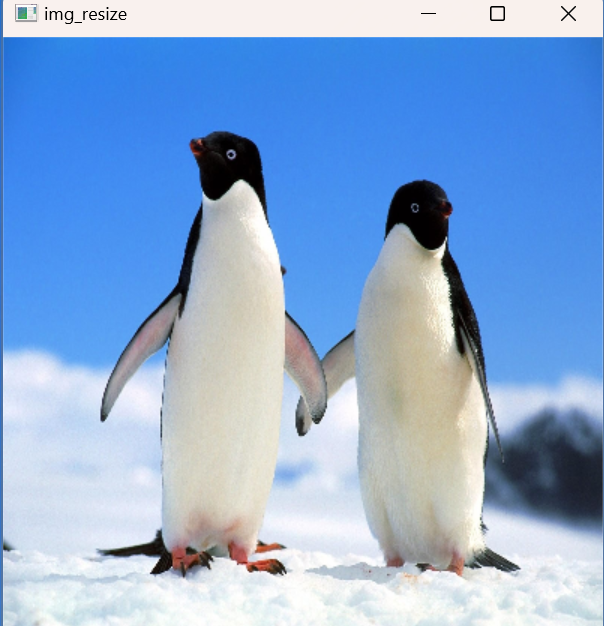
三、图像缩放
import cv2
img = cv2.imread('penguin.jpg')
img_resize = cv2.resize(img, (400, 400))
cv2.imshow('img',img)
cv2.imshow('img_resize',img_resize)
cv2.waitKey(0)
cv2.destroyAllWindows()说明:
-
cv2.resize()支持调整图像分辨率,常用于适配模型或显示需求。
四、读取灰度图像并保存
读取图片时直接处理成灰度
import cv2
img = cv2.imread(r'./penguin.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('penguin_gray',img)
a = cv2.waitKey(0)
print(a)
cv2.destroyAllWindows()print("图像形状(shape):",img.shape)
print("图像数据类型(dtype)",img.dtype)
print("图像大小(size)",img.size)cv2.imwrite('penguin_gray.jpg', img) #保存灰度图片或:
读取彩色图片后,cv2.cvtColor()进行颜色空间转换
img = cv2.imread('penguin.jpg')
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)说明:
-
使用
cv2.IMREAD_GRAYSCALE可将图像读取为灰度格式。 -
cv2.cvtColor()进行颜色空间转换。 -
cv2.imwrite()用于保存图像。
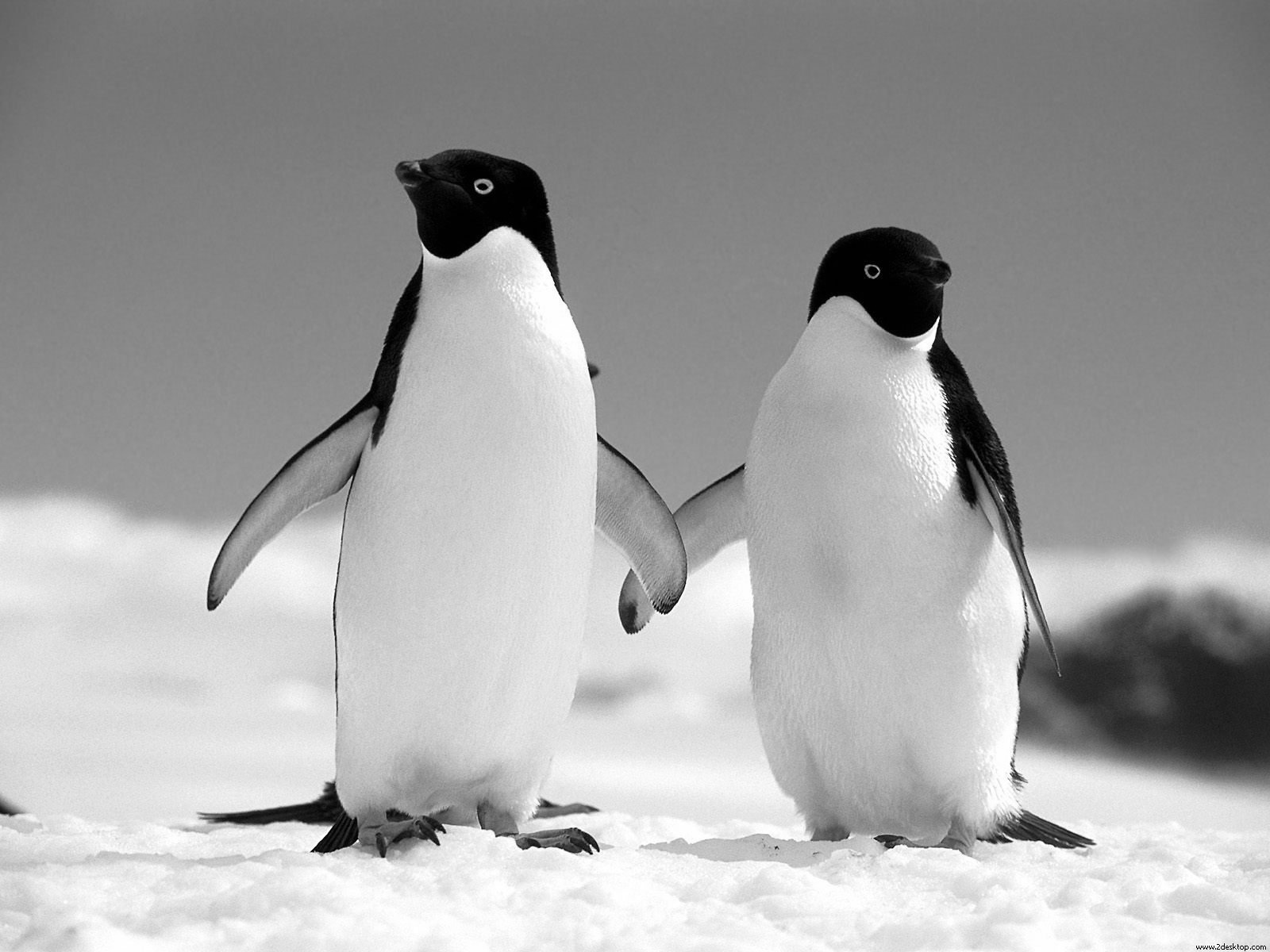
五、图像裁剪
import cv2
img1 = cv2.imread('penguin.jpg')
img2 = img1[150:350,500:700]
cv2.imshow('penguin',img1)
cv2.imshow('penguin_head',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()说明:
-
图像裁剪可通过 NumPy 的数组切片完成。
六、读取视频文件或摄像头
import cv2
video_capture = cv2.VideoCapture('video1.mp4') # 若参数为0,则为摄像头
if not video_capture.isOpened():print("无法打开")exit()
while True:ret, frame = video_capture.read()if not ret:breakframe = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)cv2.imshow('Video', frame)if cv2.waitKey(1) == 27: # 数字为每一帧的间隔break
video_capture.release()
cv2.destroyAllWindows()摄像头读帧:video_capture = cv2.VideoCapture(0)
说明:
-
cv2.VideoCapture()可打开视频文件或0摄像头。 -
video_capture.isOpened():检查摄像头是否成功打开,返回True(成功)或False(失败)。 -
cv2.cvtColor()进行颜色空间转换。 -
ret, frame = video_capture.read()video_capture.read():从摄像头读取一帧图像。- 返回两个值:
ret是布尔值(True表示读取成功,False表示失败,如摄像头断开);frame是读取到的图像帧(numpy 数组格式)。
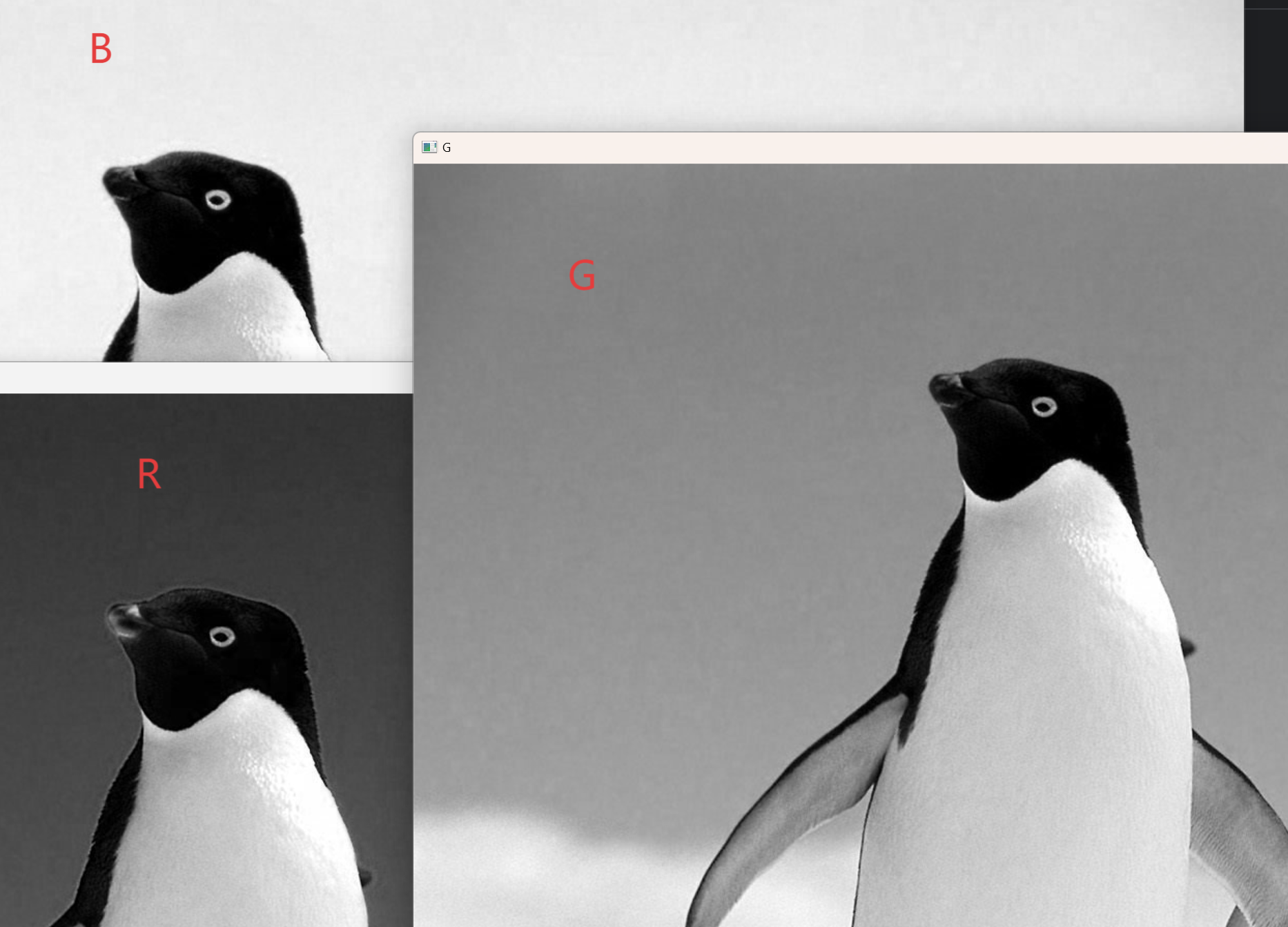
七、分离与合并颜色通道
分离通道指的是将一个三通道彩色图像拆成 三个单通道灰度图
所以每个图只表示一个颜色成分的强度(所有颜色都由红蓝绿三原色组成)
import cv2
img1 = cv2.imread('penguin.jpg')
# =====分离颜色通道=====
# 两种分离方式:
# B = img1[:, :, 0] # 蓝色B通道
# G = img1[:, :, 1] # 绿色G通道
# R = img1[:, :, 2] # 红色R通道
B, G, R = cv2.split(img1)
cv2.imshow('B', B)
cv2.imshow('G', G)
cv2.imshow('R', R)
cv2.waitKey(0)
# =====合并颜色通道=====
img2 = cv2.merge([B, G, R])
cv2.imshow('RGB', img2)
cv2.waitKey(0)
cv2.destroyAllWindows()说明:
-
cv2.split()分离 B、G、R 通道。 -
cv2.merge()合并通道生成彩色图像。
通过调试观察数据组成:
可以看到数据的上面是![]()
八、区域像素替换与图像合成
7.1 用随机像素填充图像区域(打码):
import cv2
import numpy as np
img = cv2.imread('penguin.jpg')
img[150:350,500:700] = np.random.randint(0,256,(200,200,3))
cv2.imshow('penguin_head',img)
cv2.waitKey(0)
cv2.destroyAllWindows()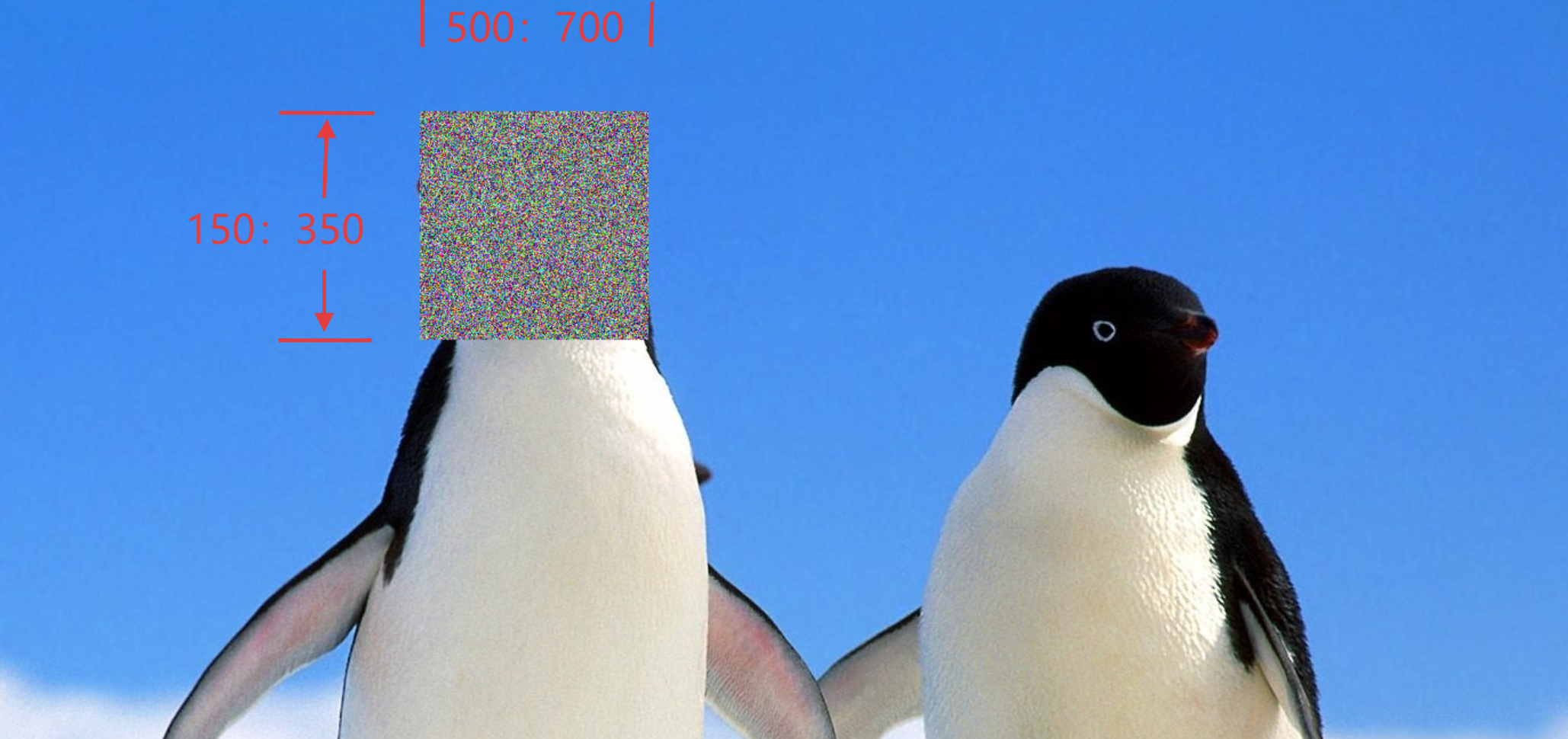
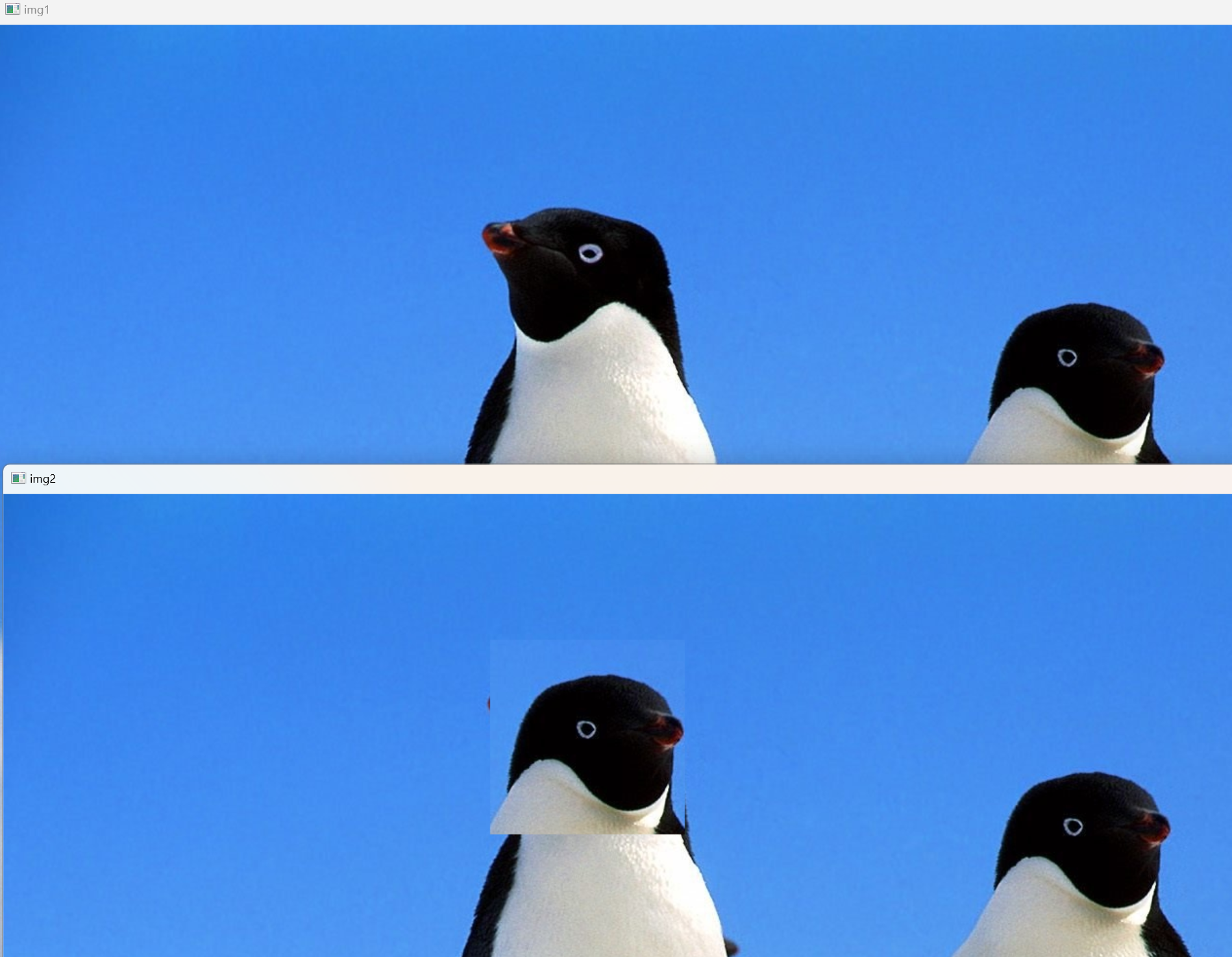
7.2 图像区域拷贝与粘贴(换头):
import cv2
img1 = cv2.imread('penguin.jpg')
img2 = cv2.imread('penguin.jpg')# head = img1[150:350,500:700]
# img2[250:450,1000:1200] = head
head = img1[250:450,1000:1200]
img2[150:350,500:700] = headcv2.imshow('img1',img1)
cv2.imshow('img2',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()说明:
-
通过数组操作,可轻松实现区域复制与图像拼接。
总结
通过本教程,我们学习了 OpenCV 的以下基础内容:
| 功能 | 使用方法 |
|---|---|
| 图像读取 | cv2.imread() |
| 图像展示 | cv2.imshow() |
| 灰度图转换 | cv2.IMREAD_GRAYSCALE、cv2.cvtColor() |
| 图像裁剪 | NumPy 切片 |
| 视频读取 | cv2.VideoCapture() |
| 通道分离与合并 | cv2.split()、cv2.merge() |
| 图像缩放 | cv2.resize() |
| 图像保存 | cv2.imwrite() |