生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践
近年来,伴随自动驾驶技术的快速发展,行业对于仿真测试平台的精度、覆盖率和可扩展性提出了更高要求。尤其在数据闭环迭代、长尾场景验证及安全冗余验证等关键环节中,高保真、高复杂度的场景生成能力正在成为测试体系的核心支撑。
传统场景生成方式面临效率低、人工成本高、行为多样性不足等问题,难以满足当前智能驾驶系统对大规模、多模态、真实物理驱动场景的需求。为应对这一挑战,基于生成式AI的4D场景生成技术迅速兴起,构建了从环境建模、行为重建到视觉渲染的完整链条,正在重塑自动驾驶仿真验证的技术基础。
本文将从技术背景、系统能力、核心技术和实际应用四个方面,系统梳理AI驱动的4D场景生成体系及其在自动驾驶仿真中的实践价值。
一、测试覆盖率瓶颈与生成式AI切入点
自动驾驶测试需要应对极其复杂的交通场景,包括非结构化路口、弱交通规则区域、极端天气、低照度场景,以及多主体交互引发的不确定性行为等。当前基于真实数据采集或手工建模的方式存在如下限制:
(1)采集成本高:依赖实车、实景、多模态同步设备,周期长、数据稀疏;
(2)稀有场景不足:事故场景、异常行为等真实比例极低,难以高质量复现;
(3)组合爆炸问题:参数空间(如天气、时间、交通密度)指数级增长,难以人工覆盖;
(4)场景可控性弱:缺乏可调控的语义接口,测试粒度不足。
生成式AI具备从数据中学习潜在分布、生成新组合样本的能力。其引入使得场景构建从“手工定义”转向“自动生成”,具备如下优势:
(1)能构造真实但未见过的长尾组合;
(2)能对目标测试策略进行定向增强(如遮挡率、交通密度等指标);
(3)可支持大规模仿真测试平台的持续供场;
(4)支持动态交互与时间演进建模,构建完整4D语义闭环。
二、4D场景生成的核心能力
所谓4D场景生成,核心在于“空间 + 时间”的联合建模能力,既要对物理环境建模,也要对场景中各类参与者的行为轨迹进行动态建模与演化。典型的系统能力包括:
(1)几何/语义重建能力:生成准确的道路、建筑、交通设施等结构化环境,并附带完整语义标签;
(2)多主体行为建模能力:生成车辆、行人、非机动车的时序轨迹,满足行为逻辑与交互合理性;
(3)高保真视觉建模能力:输出具备真实纹理、光照与传感器特性的图像序列;
(4)物理一致性约束能力:保持交通规则、实体尺寸、运动学约束等基本物理一致性;
(5)模态可控能力:支持控制场景的天气、时间、视角、密度、行为模式等关键参数。
在不同技术路径中,上述能力往往由多个模块联合实现,从数据驱动的轨迹预测模型,到神经渲染网络,再到多模态融合仿真接口,共同构成完整的4D场景生成流水线。
三、核心技术解析
1、Neural Radiance Fields(NeRF)
NeRF是一种基于神经网络的体积渲染方法,通过对空间点位置与观察方向的编码,学习输出每个点的颜色与密度,实现高质量的三维重建与新视角图像合成。
(1)技术特点
- 具备极高的渲染保真度;
- 支持任意视角合成,适用于多视图重建任务;
- 对遮挡、反射、透明等复杂视觉效果建模能力强。
(2)局限性
- 训练效率低,渲染速度慢;
- 不原生支持动态场景;
- 依赖多视角密集数据输入。
NeRF更适合作为小规模高精重建模块,用于城市局部区域或典型交互区域建模。

EmerNeRF的自动驾驶场景重建真值/渲染值对比
2、3D Gaussian Splatting(3DGS)
3D Gaussian Splatting 是近年来提出的高效神经渲染方法,由 Inria 团队于 2023 年发布。它采用高斯分布建模离散点云,在屏幕空间进行泼溅(splatting)操作,从而实现对三维场景的实时渲染。不同于 NeRF 使用体积积分的方式,3DGS 将空间中的颜色和密度建模为可渲染的高斯球体,渲染效率显著提升。
其主要优势包括:
(1)极高的渲染效率:相比 NeRF 快数百倍,可实现实时或近实时的图像合成;
(2)训练速度快:几十秒到几分钟即可完成一个中等规模场景的建模;
(3)结构紧凑,易于部署:渲染结构不依赖深度网络推理,适合本地仿真引擎嵌入;
(4)视觉质量优异:保留了 NeRF 的软阴影、光照过渡与遮挡关系等特性。
在自动驾驶仿真系统中,3DGS 可用于从多视角图像或视频中重建真实道路场景,为感知模型提供高保真图像合成能力,适用于传感器回放、虚拟重构、数据增强等场景,是当前神经渲染领域中效率与质量兼具的重要方案之一。
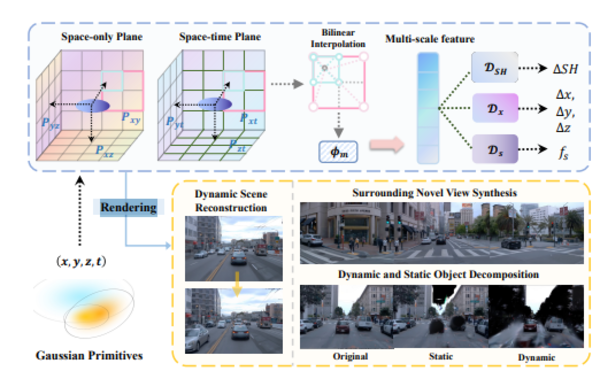
基于3DGS的S3Gaussian算法提出的重建流程
3、log2world:从实采数据到虚拟世界的桥梁
log2world是一种将自动驾驶原始数据(如ROS bag、CAN log、传感器帧)自动转化为可视、可交互仿真场景的工具链。主要功能包括:
(1)根据IMU与GNSS数据还原车辆轨迹;
(2)使用图像与点云重建环境几何与纹理;
(3)提取行为序列并重建动态参与者;
(4)输出统一格式场景文件,支持仿真平台直接加载(如Unreal、CARLA、LGSVL等)。
log2world显著降低了真实场景数字化与复现成本,是构建基于真实行为数据的4D测试场景的重要手段。
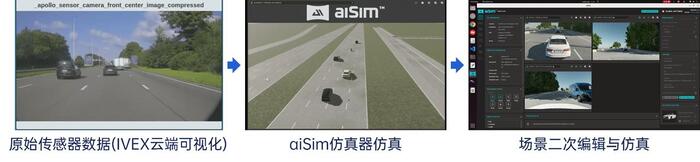
用于Log2World仿真的流程示例(IVEX+aiSim)
四、应用场景与系统集成实践
生成式AI+4D场景生成技术目前已在以下典型场景中形成落地:
(1)闭环验证系统:自动识别模型薄弱场景,动态生成补全,形成仿真-训练-验证闭环;
(2)多模态数据生成引擎:结合仿真接口输出RGB图像、深度图、点云、语义标签等,用于感知模型训练;
(3)长尾用例扩增:生成特定条件组合下的稀有事件,如夜间施工、交通事故、人车混行等;
(4)仿真平台集成:与CARLA、Unreal、aiSim等平台对接,作为自动构图/行为驱动模块使用;
(5)城市级数字孪生:快速还原城区典型路段结构及交通特征,支持区域智能交通仿真与决策测试。
五、结语
未来,随着大模型融合语义驱动生成(如Prompt-to-Scene)、行为轨迹生成器与语义控制接口集成、生成内容与实车反馈协同优化机制的发展,AI生成的4D场景将成为自动驾驶数据体系中的基础设施,为模型迭代、安全验证与持续运营提供核心支撑。
4D场景生成技术正从研究阶段走向规模应用,构建出兼顾真实性、复杂性与效率的场景生成能力,是实现自动驾驶系统仿真闭环与持续优化的关键引擎。
生成式AI正逐步承担起从世界建模者到智能验证者的角色,其影响力正在由测试阶段扩展至研发、训练、部署等完整流程。可以预见,未来的自动驾驶系统开发,将越来越依赖于这一类“生成驱动的智能仿真基础设施”。
▍参考文献
1. EmerNeRF: Emergent Spatial-Temporal Scene Decomposition via Self-Supervision
2. S3Gaussian: Self-Supervised Street Gaussians for Autonomous Driving
aiSim自动驾驶仿真平台 - 端到端智驾仿真工具 | 高保真环境模拟和场景重建 | 软件在环测试 | 康谋科技![]() https://keymotek.com/adas-simulator-aisim/
https://keymotek.com/adas-simulator-aisim/
我是分享自动驾驶技术的康谋,欢迎关注互动!