nav2--安装/教程
教程
英文官网
鱼香Nav2 中文网
鱼香nav2官网
安装
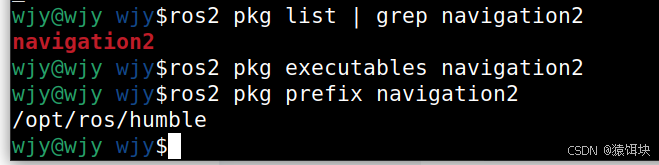
检查系统是否安装了nav2:
ros2 pkg list | grep navigation2
或者查找包:
ros2 pkg prefix navigation2
安装:
sudo apt install ros-${ROS_DISTRO}-navigation2
sudo apt install ros-${ROS_DISTRO}-nav2-bringup
英文官网
鱼香Nav2 中文网
鱼香nav2官网
检查系统是否安装了nav2:
ros2 pkg list | grep navigation2
或者查找包:
ros2 pkg prefix navigation2
安装:
sudo apt install ros-${ROS_DISTRO}-navigation2
sudo apt install ros-${ROS_DISTRO}-nav2-bringup