无人机避障——感知篇(Orin nx采用zed2双目相机进行Vins-Fusion定位,再通过位姿和深度图建图完成实时感知)
通过ZED2双目视觉相机进行Vins FusionSLAM定位之后,需要获取其中的信息完成无人机的实时感知部分,感知需要的是栅格地图话题,因为EGO-planner高飞老师就是通过Vins Fusion做感知的部分,所以其中可以借鉴一下建图方法。
通过ZED2双目视觉相机进行Vins FusionSLAM定位看我的前一篇涉及到双目视觉标定、IMU标定以及感知定位实际测试的文章:
无人机避障——感知篇(在Ubuntu20.04的Orin nx上基于ZED2实现Vins Fusion)-CSDN博客
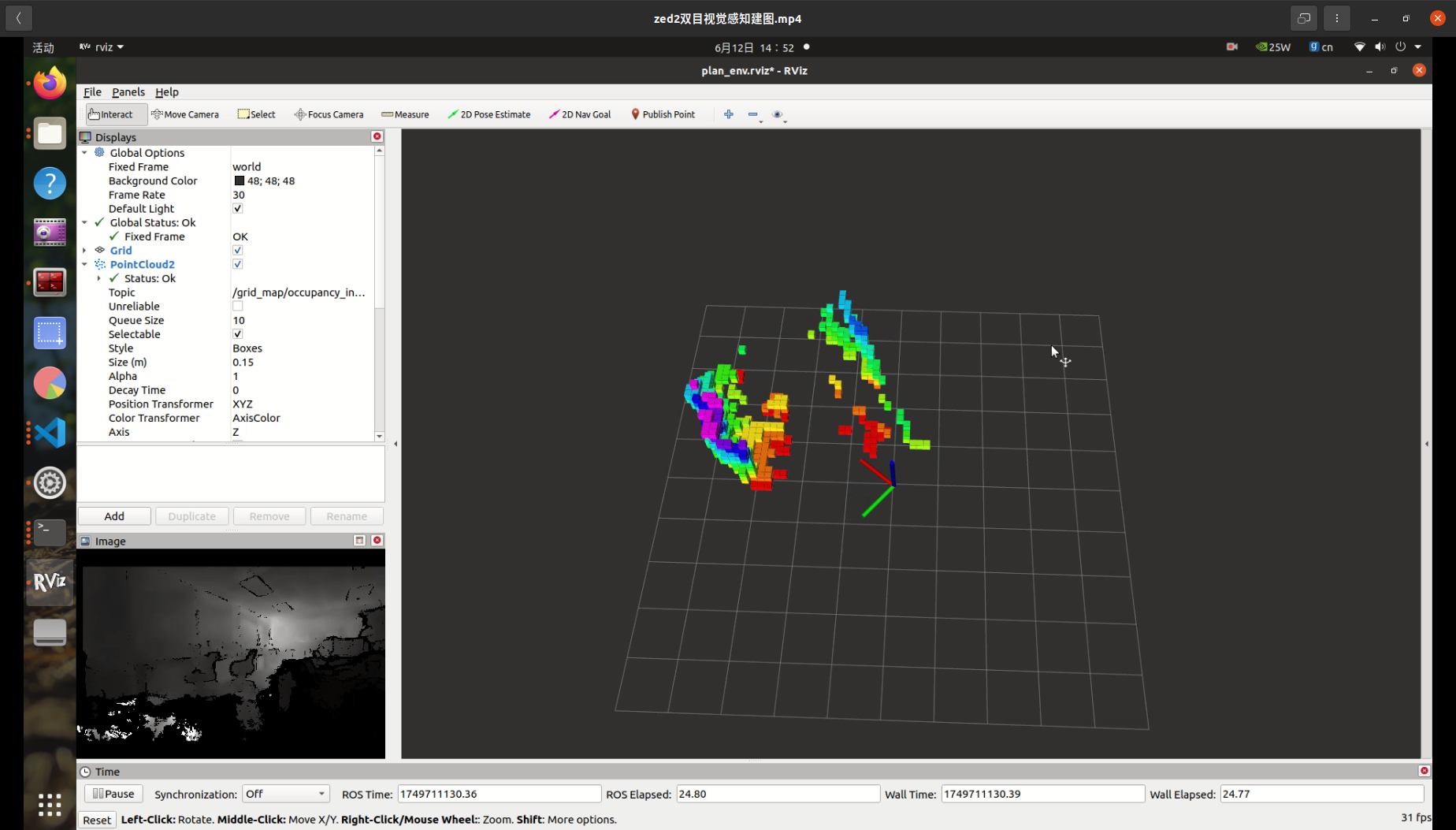
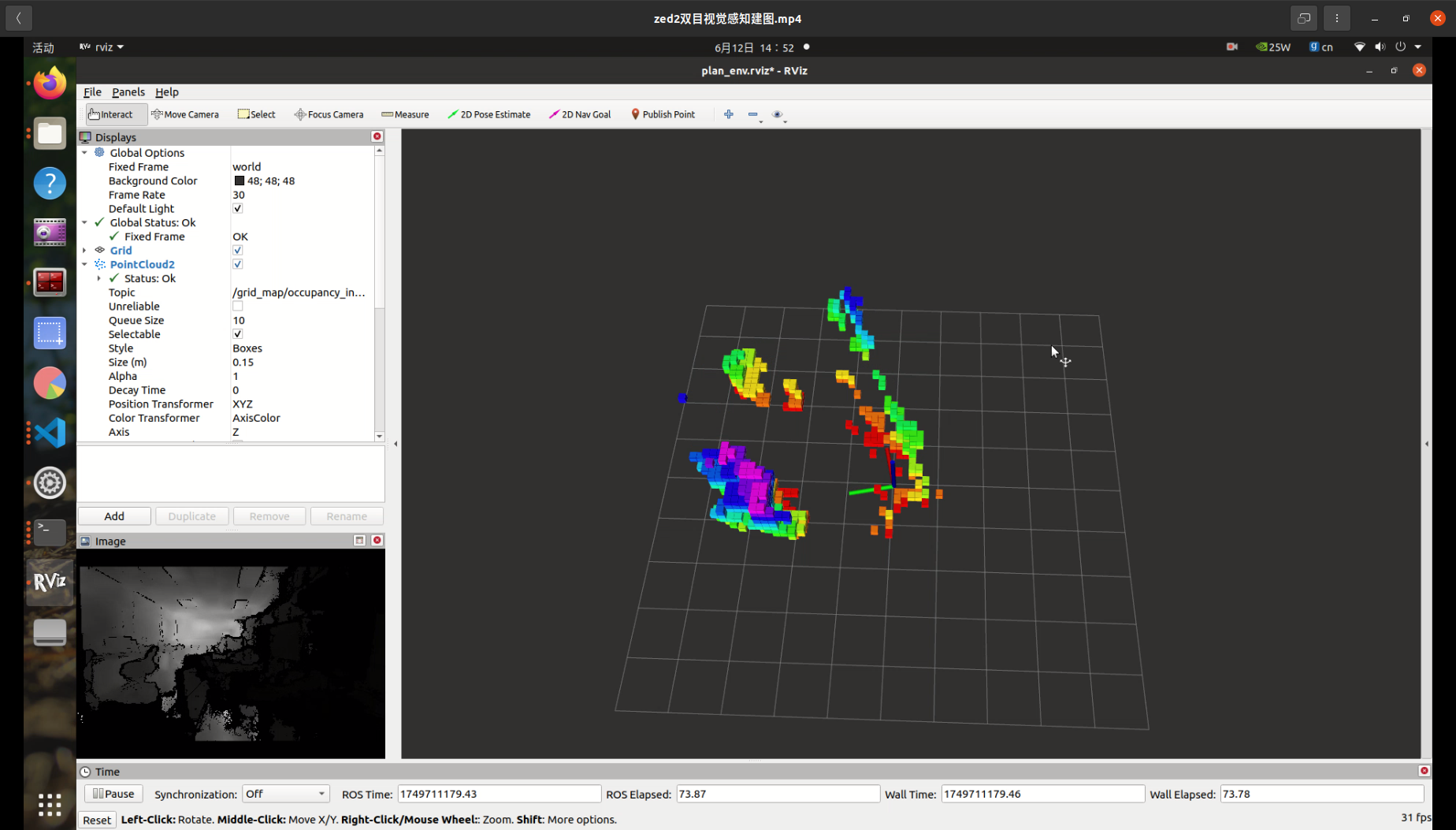
结果展示:
借鉴Ego-Planner中的plan_env代码:
发现别人已经改好了EGO中相关建图环境部分的代码:
https://github.com/maxibooksiyi/ego_grid_map.git
下载以后进行编译安装:
这部分基本操作不赘述。
然后修改话题:
这是我已经修改好的,就两个话题进行修改就可以。
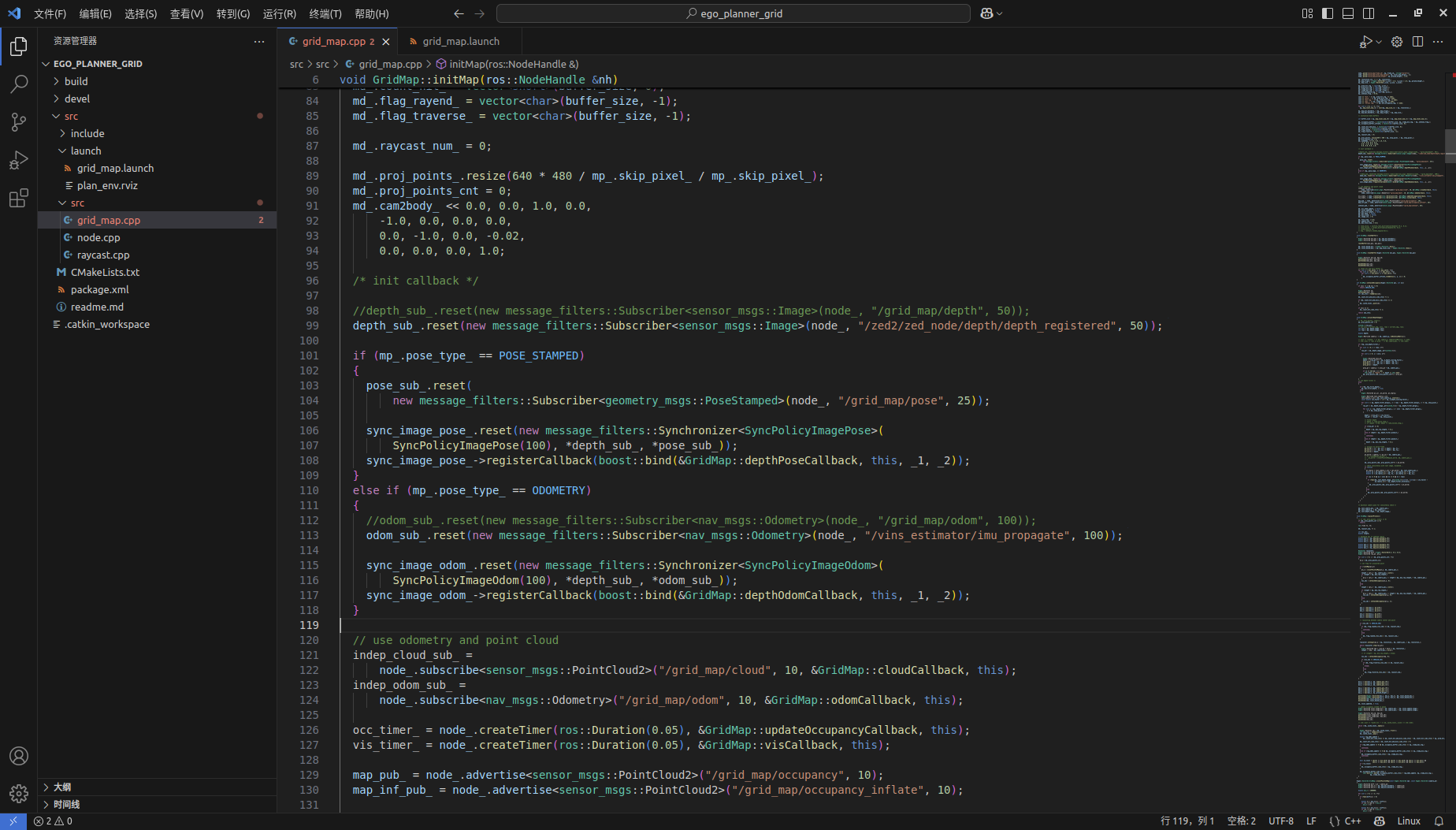
原来的代码:
//depth_sub_.reset(new message_filters::Subscriber<sensor_msgs::Image>(node_, "/grid_map/depth", 50));depth_sub_.reset(new message_filters::Subscriber<sensor_msgs::Image>(node_, "/camera/aligned_depth_to_color/image_raw", 50));if (mp_.pose_type_ == POSE_STAMPED){pose_sub_.reset(new message_filters::Subscriber<geometry_msgs::PoseStamped>(node_, "/grid_map/pose", 25));sync_image_pose_.reset(new message_filters::Synchronizer<SyncPolicyImagePose>(SyncPolicyImagePose(100), *depth_sub_, *pose_sub_));sync_image_pose_->registerCallback(boost::bind(&GridMap::depthPoseCallback, this, _1, _2));}else if (mp_.pose_type_ == ODOMETRY){//odom_sub_.reset(new message_filters::Subscriber<nav_msgs::Odometry>(node_, "/grid_map/odom", 100));odom_sub_.reset(new message_filters::Subscriber<nav_msgs::Odometry>(node_, "/vins_estimator/imu_propagate", 100));sync_image_odom_.reset(new message_filters::Synchronizer<SyncPolicyImageOdom>(SyncPolicyImageOdom(100), *depth_sub_, *odom_sub_));sync_image_odom_->registerCallback(boost::bind(&GridMap::depthOdomCallback, this, _1, _2));}修改之后的代码:
//depth_sub_.reset(new message_filters::Subscriber<sensor_msgs::Image>(node_, "/grid_map/depth", 50));depth_sub_.reset(new message_filters::Subscriber<sensor_msgs::Image>(node_, "/zed2/zed_node/depth/depth_registered", 50));if (mp_.pose_type_ == POSE_STAMPED){pose_sub_.reset(new message_filters::Subscriber<geometry_msgs::PoseStamped>(node_, "/grid_map/pose", 25));sync_image_pose_.reset(new message_filters::Synchronizer<SyncPolicyImagePose>(SyncPolicyImagePose(100), *depth_sub_, *pose_sub_));sync_image_pose_->registerCallback(boost::bind(&GridMap::depthPoseCallback, this, _1, _2));}else if (mp_.pose_type_ == ODOMETRY){//odom_sub_.reset(new message_filters::Subscriber<nav_msgs::Odometry>(node_, "/grid_map/odom", 100));odom_sub_.reset(new message_filters::Subscriber<nav_msgs::Odometry>(node_, "/vins_estimator/imu_propagate", 100));sync_image_odom_.reset(new message_filters::Synchronizer<SyncPolicyImageOdom>(SyncPolicyImageOdom(100), *depth_sub_, *odom_sub_));sync_image_odom_->registerCallback(boost::bind(&GridMap::depthOdomCallback, this, _1, _2));}
需要修改话题:
双目相机的深度图话题:
<sensor_msgs::Image>(node_, "/camera/aligned_depth_to_color/image_raw", 50)
替换成ZED2双目相机的深度图话题:
<sensor_msgs::Image>(node_, "/zed2/zed_node/depth/depth_registered", 50)
Vins Fusion的位姿话题:
<nav_msgs::Odometry>(node_, "/vins_estimator/imu_propagate", 100)
无需修改,都是用Vins Fusion进行获取。
然后在我的前一个博客的bash文件的基础上,加上此处建图的一键启动命令:
# run.sh文件#!/bin/bash# Start roscore
gnome-terminal -- bash -c "roscore"
# Start RViz
# gnome-terminal -- bash -c "cd vins_ws && source devel/setup.bash && roslaunch vins vins_rviz.launch"# Start VINS-Fusion node
sleep 5
gnome-terminal -- bash -c "cd vins_ws && source devel/setup.bash && rosrun vins vins_node src/VINS-Fusion/config/zed/zed2_stereo_config.yaml"#回环检测
sleep 5
gnome-terminal -- bash -c "cd vins_ws && source devel/setup.bash && rosrun loop_fusion loop_fusion_node src/config/zed/zed2_stereo_config.yaml"## 实时相机
sleep 5
gnome-terminal -- bash -c "cd vins_ws && source devel/setup.bash && source /home/nvidia/zed_ws/devel/setup.bash && roslaunch zed_wrapper zed2.launch"## 实时建栅格地图
sleep 5
gnome-terminal -- bash -c "cd vins_ws && source devel/setup.bash && source /home/nvidia/ego_planner_grid/devel/setup.bash && roslaunch plan_env grid_map.launch"
# Play rosbag
# sleep 5
# gnome-terminal -- bash -c "source devel/setup.bash && rosbag play /home/nvidia/data_set/MH_01_easy.bag"# Keep the terminal open until you manually close it
echo "Press Enter to close the terminals"
read最后就实现了建图效果!!!
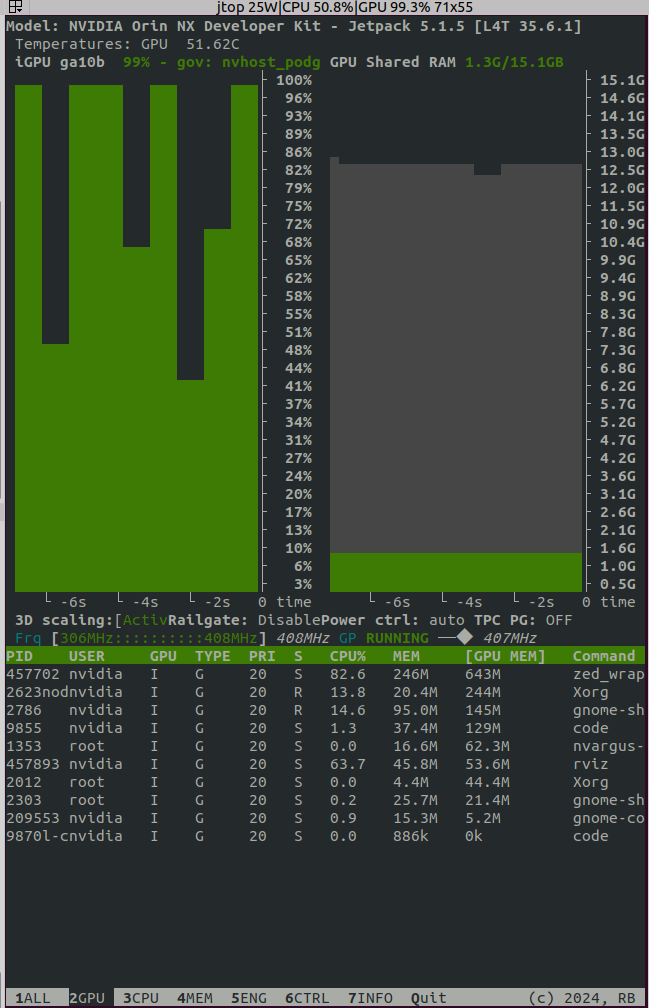
这里发现好像用的一直都是Orin nx的igpu集成显卡进行计算的,之后将进行Vins Fusion GPU的实时建图感知。
以下是查找相关资料的参考内容(非常不错的参考!!!):
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并_哔哩哔哩_bilibili
把ego-planner的plan_env单独取出订阅位姿和深度图构建自己可用的导航地图_ego planner换地图-CSDN博客