【MATLAB例程】基于脉冲雷达的TDOA目标定位,适用于四个锚点、三维空间的环境,附代码下载链接
本文给出一个关于脉冲雷达目标定位的说明以及相应的 MATLAB 例程。
文章目录
- 脉冲雷达目标定位说明
- 运行结果
- 代码说明
- 基本原理
- 脉冲雷达目标定位的关键步骤
- MATLAB 例程
脉冲雷达目标定位说明
脉冲雷达是一种通过发射电磁脉冲并接收目标反射回波来实现目标探测与定位的系统。其基本工作原理是根据电磁波传播的时间和能量变化,计算目标的距离、方位和速度信息。
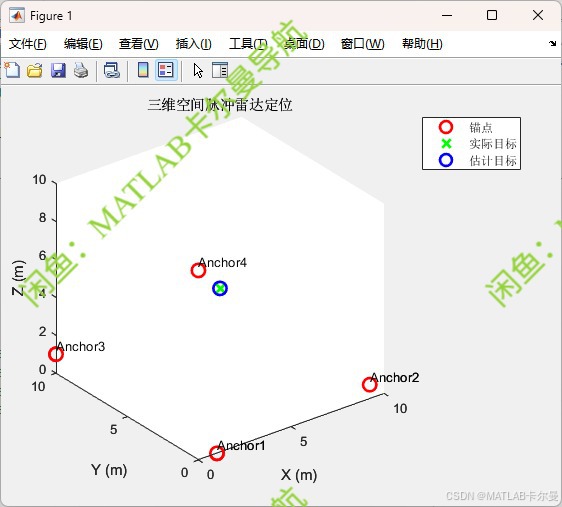
运行结果
定位结果示意图:
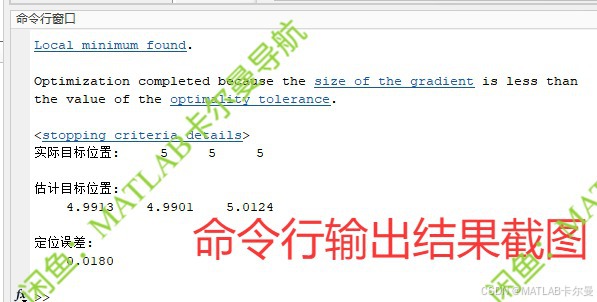
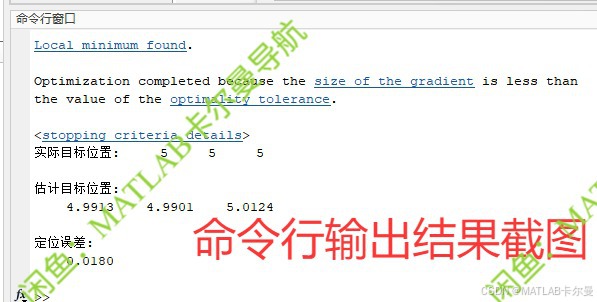
命令行截图:
代码结构:
代码说明
-
参数设置
- 定义了雷达的基本参数,包括载频、脉冲重复间隔、采样率、脉冲宽度等。
- 设置了目标距离和信噪比。
-
发射信号生成
- 使用线性调频信号(LFM)作为脉冲雷达的发射信号。
-
目标回波信号模拟
- 根据目标距离计算回波时延,并将发射信号延迟后叠加噪声,模拟接收到的回波信号。
-
匹配滤波处理
- 使用匹配滤波器提取回波信号的峰值位置,从而计算目标的时延和距离。
-
可视化
- 绘制接收信号和匹配滤波器输出信号的幅度图,便于观察信号特征。
基本原理
-
目标距离测量
通过测量雷达发射脉冲信号到接收到回波信号的时间差(即回波时延),结合电磁波传播速度 c c c,可以计算目标的距离:
R = c ⋅ Δ t 2 R = \frac{c \cdot \Delta t}{2} R=2c⋅Δt
其中:- R R R: 目标距离
- c c c: 光速(约为 3 × 10 8 m / s 3 \times 10^8 \, \mathrm{m/s} 3×108m/s)
- Δ t \Delta t Δt: 发射与接收的时间差
-
目标方位测量
通过天线的波束指向角或者多天线接收信号的相位差,计算目标的方向角(方位与俯仰)。 -
目标速度测量
利用多普勒效应,测量目标的径向速度 v r v_r vr:
f d = 2 v r f 0 c f_d = \frac{2 v_r f_0}{c} fd=c2vrf0
其中:- f d f_d fd: 多普勒频移
- f 0 f_0 f0: 雷达发射信号的载波频率
脉冲雷达目标定位的关键步骤
- 发送脉冲信号(通常为线性调频信号)。
- 接收回波信号并进行匹配滤波处理。
- 提取回波信号的时延、幅度和多普勒频移。
- 根据时延计算目标距离,根据多普勒频移计算目标速度,根据天线指向角计算目标方位。
MATLAB 例程
% 脉冲雷达,基于TDOA的目标定位,MATLAB代码,四个锚点、三维空间的定位
% 作者微信:matlabfilter,可接定位与导航的
% 2025-05-28/Ver1
clc; clear; close all;
rng(0);%% 参数定义
c = 3e8; % 波速 (m/s)
fs = 1e10; % 采样率 (Hz)
pulse_width = 1e-5; % 脉冲宽度 (s)
f0 = 1e5; % 信号中心频率 (Hz)
SNR = 10; % 信噪比 (dB)% 锚点坐标 (四个锚点)
anchors = [1, 0, 0; % 锚点110, 1, 0; % 锚点20, 10, 1; % 锚点30, 0, 10 % 锚点4
];% 目标点
target = [5, 5, 5];% 计算真实距离
[distances] = sqrt(sum((anchors - target).^2, 2)); % 距离 (m)% distances/c*2
完整代码的下载链接:https://download.csdn.net/download/callmeup/90926879
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者