C++ Avl_Tree
AVL树本质上是在搜索二叉树的情况下改造的
搜索二叉树的缺点是 最坏的时候效率太低
容易演变成链表
AVL树对搜索二叉树的这个痛点进行了改造
解决方案就是旋转
通过旋转AVL树可以做到左右每个子树高度可以不超过1
要了解旋转 我们首先要了解平衡因子
(1)平衡因子(balance factor)
后面都简称bf
平衡因子=右子树高度减去左子树高度
AVL树要求左右每个子树高度不超过1
也就意味着AVL树节点的平衡因子只有三种情况
0 -1 1
不可能是其他值
(2)插入的时平衡因子的变化
(1)插入的时候可能影响哪些节点的平衡因子?
会影响插入这个节点的所有祖先
(2)这些平衡因子怎么变化的?
插入左节点它的parent的平衡因子就要-1
插入右节点它的parent的平衡因子就要+1
(3)平衡因子怎么改变树的高度
parent这样 那么parent的parent 也就是grandparent平衡因子怎么办呢?
这个时候我们就要考虑parent的高度有没有变化了?
我们思考parent平衡因子以下这几种变化情况
平衡因子为1 意味着parent的右子树比左子树高度高1
平衡因子为-1 意味着parent的左子树比右子树高度高1
平衡因子为0意味着左子树和右子树高度相同
1. 1->0
2.0->1
3.0->-1
4.-1->0
我们发现上面这四种情况
只有2 3会改变树的高度而1 4不会改变树的高度 只会让树变得更平衡
也就意味着我们更新平衡因子 不一定要顺着往上把所有的祖先平衡因子更新
只用更新到 2 3两种情况就可以停止了 因为遇到2 3两种情况高度就不会改变
也就不会改变更上面的祖先 就可以停止了!!!
(3)平衡因子为2和-2怎么办?
这个时候就已经破坏了AVL树的结构了
我们就需要旋转了
旋转分为单旋和双旋
(1)单旋
单旋分为左单旋和右单旋
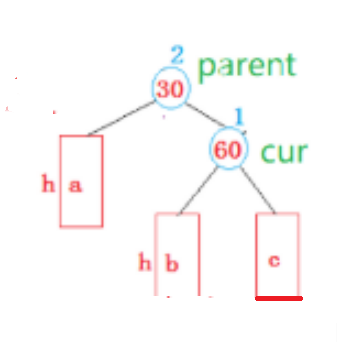
我们先来看左单选是什么情况下
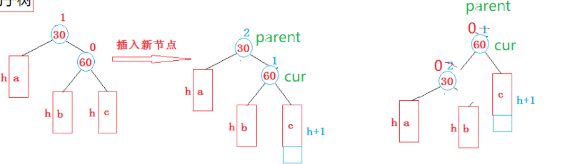
节点30平衡因子为2 也就意味着
左树比右数要高2
那么如果我把左树高度-1 右树高度+1 不就平衡了吗?
那这个时候我们旋转
我们把平衡因子为2的节点设为parent 简称par(也就是上图的30)
那么它的 插入节点那侧 的子树的根设为current简称cur(也就是上图的60)
我们旋转要保证两件事
1.旋转后平衡因子绝对值小于等于1
2.旋转后依然符合搜索二叉树 右节点>根>左节点
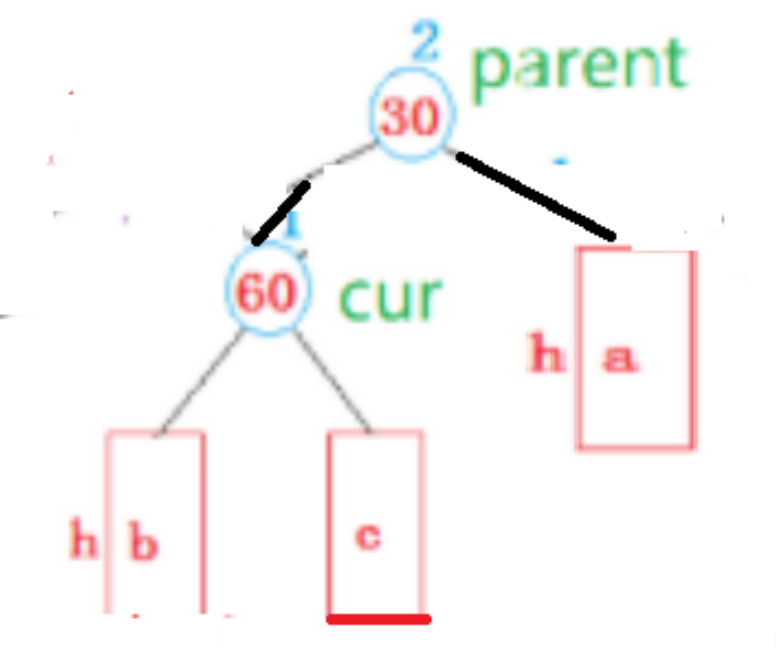
左旋本质上是
把原本的cur变成了根
par以及它的左子树 变成了cur的左子树
cur的左子树(也就是较短的子树)变成了parent的右子树
而且单旋后cur和par 节点的平衡因子都为0
但是这个地方要注意的是什么?
我们这个AVL树是三叉链 分别为 left节点 right节点 parent三个节点
也就是我们实现代码的时候要去考虑parent的变化
root的parent节点为NULL
旋转首先如图可见 是不是平衡了
那么是否满足搜索二叉树呢?
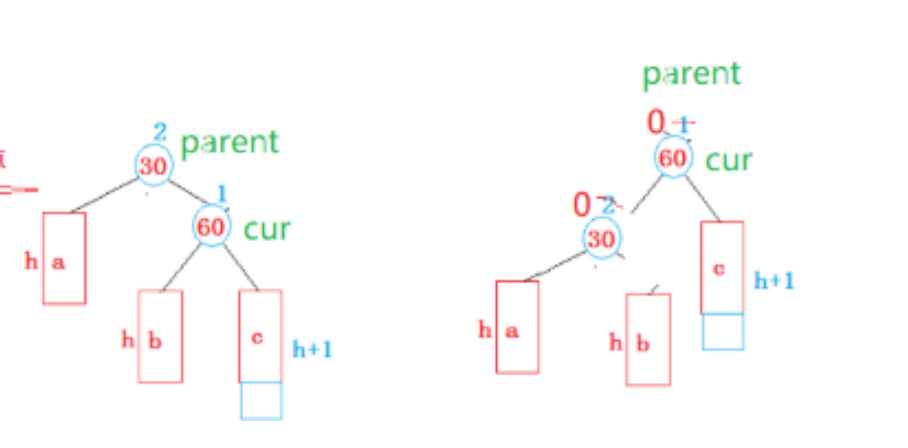
旋转前 c>cur(60)>b>par(30)>a
旋转后 c>cur(60)>b>par(30)>a
旋转前后 这两个树 放到搜索二叉树那里 本质上原因就是我们插入的先后顺序不一样
这其实也侧面说明了
为啥搜索二叉树我们实现拷贝构造 是左子树右子树开空间构造
而不是说insert去构造 因为如果insert构造 你不同遍历方式结果是完全不一样的
我们说明了左旋和原理
既可以平衡
同时也可以不违背搜索二叉树
右单旋同理 这里就不详细介绍了
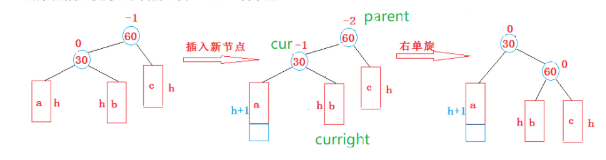
(2)双旋
双旋分为右左旋和左右旋
我们先来看这种情况
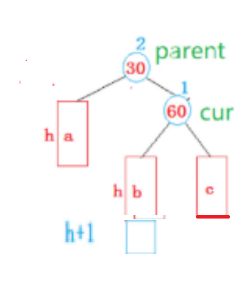
我们可不可以只左旋?
够不够?
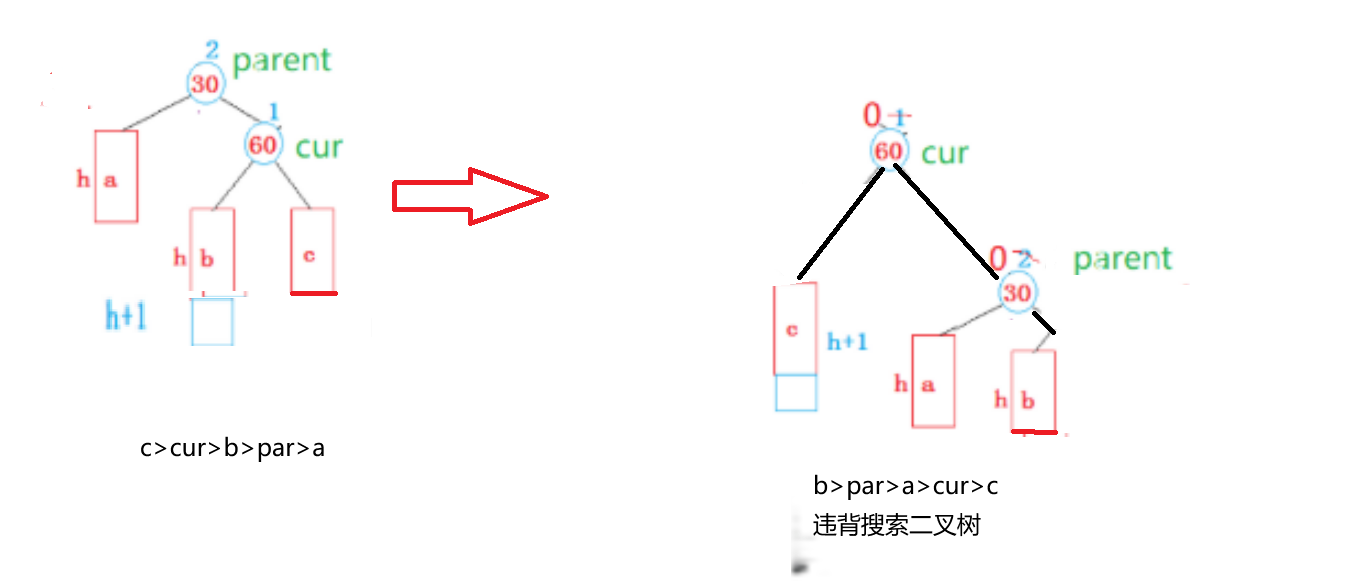
我们发现旋转后我们可以保持平衡但是破坏了搜索二叉树的性质!
这个地方需要的操作是双旋
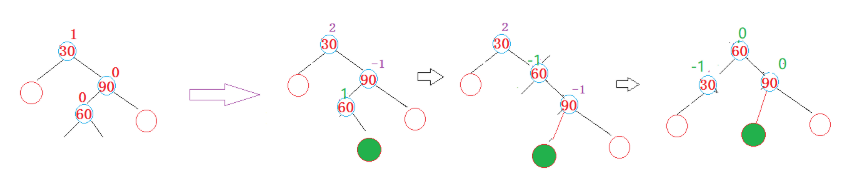
我们以实际例子来示范 (右左旋)
当h==0的时候
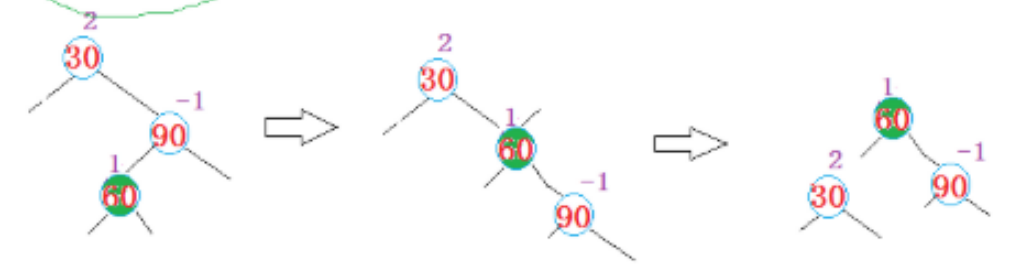
我们第一步是 右旋 右旋结束后 就变成左旋可以解决的样子了
h==1也是同理

也就是
我们对这种情况b和c两个位置插入都解决了
是不是也意味着
下面这种情况在b和插入同理
不过是从左旋 和右左旋
变成了右旋 和左右旋 对嘛!!!
但是这个地方我们要考虑
单旋旋转结束cur和par的平衡因子都变成了0
但是双旋呢?
(4)双旋平衡因子变化
双旋就要复杂很多
涉及到三种情况
(1)第一种情况

此时par是30 cur是90 这个时候 60节点我们设为curleft
当curleft为-1时 旋转结束后
cur 的平衡因子变成了1
curleft的平衡因子变成了0
par的平衡因子变成了0
(2)第二种情况
curleft为1时旋转后 cur的平衡因子为0 curleft的平衡因子为 0 par的平衡因子为-1
(3)第三种情况
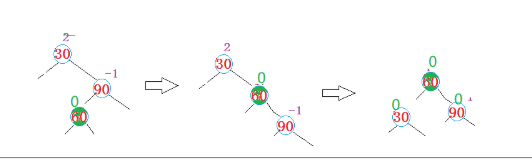
curleft为0 旋转后 cur par curleft的平衡因子都是0
对于左右旋同理 只不是考虑的不是curleft而是currightl了
最后思考一个问题
平衡因子可能是3吗?
如果你代码逻辑是对的 是不可能出现三的
为什么?
因为你每插入一次节点的平衡因子最多+1
平衡因子要变成3 就意味着上一次插入结束的时候你的平衡因子就有2
这个时候就说明你代码逻辑有问题
正常的AVL树调整后 节点的绝对值是小于2的
同样的AVL树也有它的缺点
就是旋转太频繁了
我们没必要要求这么严格的平衡
如果说平衡因子我们可以允许是2 3 4等等 也许树的高度会增加
但是却可以大幅度减少旋转次数
提高时间复杂度
我们后面学的红黑树就是利用这种思路去改善搜索二叉树的!!!
最后代码奉上
#pragma once#include<iostream>
#include<assert.h>
using namespace std;template<class K, class V>
struct AVLTreeNode
{pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf; // balance factorAVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0){}
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;// ... 控制平衡// 更新平衡因子while (parent){if (cur == parent->_left){parent->_bf--;}else // if (cur == parent->_right){parent->_bf++;}if (parent->_bf == 0){// 更新结束break;}else if (parent->_bf == 1 || parent->_bf == -1){// 继续往上更新cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){// 子树不平衡了,需要旋转if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}break;}else{assert(false);}}return true;}void RotateL(Node* parent){++_rotateCount;Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;if (curleft){curleft->_parent = parent;}cur->_left = parent;Node* ppnode = parent->_parent;parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;}void RotateR(Node* parent){++_rotateCount;Node* cur = parent->_left;Node* curright = cur->_right;parent->_left = curright;if (curright)curright->_parent = parent;Node* ppnode = parent->_parent;cur->_right = parent;parent->_parent = cur;if (ppnode == nullptr){_root = cur;cur->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;}void RotateRL(Node* parent){Node* cur = parent->_right;Node* curleft = cur->_left;int bf = curleft->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){cur->_bf = 0;curleft->_bf = 0;parent->_bf = 0;}else if (bf == 1){cur->_bf = 0;curleft->_bf = 0;parent->_bf = -1;}else if (bf == -1){cur->_bf = 1;curleft->_bf = 0;parent->_bf = 0;}else{assert(false);}}void RotateLR(Node* parent){Node* cur = parent->_left;Node* curright = cur->_right;int bf = curright->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;cur->_bf = 0;curright->_bf = 0;}else if (bf == -1){parent->_bf = 1;cur->_bf = 0;curright->_bf = 0;}else if (bf == 1){parent->_bf = 0;cur->_bf = -1;curright->_bf = 0;}}int Height(){return Height(_root);}int Height(Node* root){if (root == nullptr)return 0;int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}bool IsBalance(){return IsBalance(_root);}bool IsBalance(Node* root){if (root == nullptr)return true;int leftHight = Height(root->_left);int rightHight = Height(root->_right);if (rightHight - leftHight != root->_bf){cout << "平衡因子异常:" <<root->_kv.first<<"->"<< root->_bf << endl;return false;}return abs(rightHight - leftHight) < 2&& IsBalance(root->_left)&& IsBalance(root->_right);}private:Node* _root = nullptr;public:int _rotateCount = 0;
};