小杰机器学习(two)——导数、损失函数、斜率极值最值、微分规则、切平面与偏导数、梯度。
1.求导法则
(1)在机器学习中微积分的作用
在机器学习和深度学习中,需要衡量预测的结果和实际结果的一个差异,使用一个叫损失函数的数学打分器比对。损失函数越小,表示结果预测的准;损失函数越大表示结果预测的不准。
比如,如果我们预测明天下雨的概率是80%,但实际上明天是晴天,那么我们的预测就不准,损失函数的值就会比较高。反之,如果我们预测明天下雨的概率是5%,而明天确实是晴天,虽然我们还是预测错了,但相对来说,我们预测得“更接近”实际情况,所以损失函数的值就会低一些。
损失函数在机器学习和深度学习中非常重要,因为它指导着模型的学习过程,让模型知道应该如何调整自己的参数,以便更好地预测未来的结果。
在机器学习或者深度学习中,绝大部分任务是构建一个损失函数,然后使其最小化,这个优化的过程就是微分。
以上过程在后面学习的框架中可以自动计算,但是背后的数学原理还是需要简单学习的。
(2)导数
【例子1】小车在马路上匀速前进,一共900m,小车走了30s。
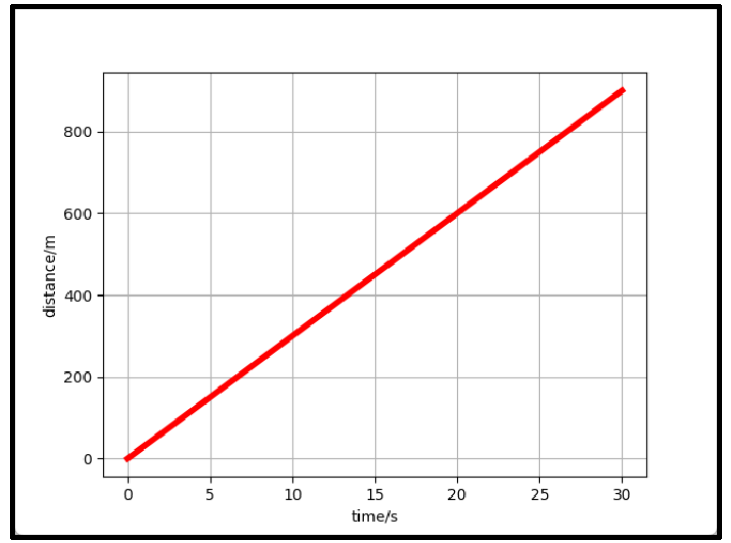
在17.5秒时,小车的速度多快?
答案:900/30=30m/s
【例子2】小车在马路上非匀速前进,一共900m,小车走了30s。
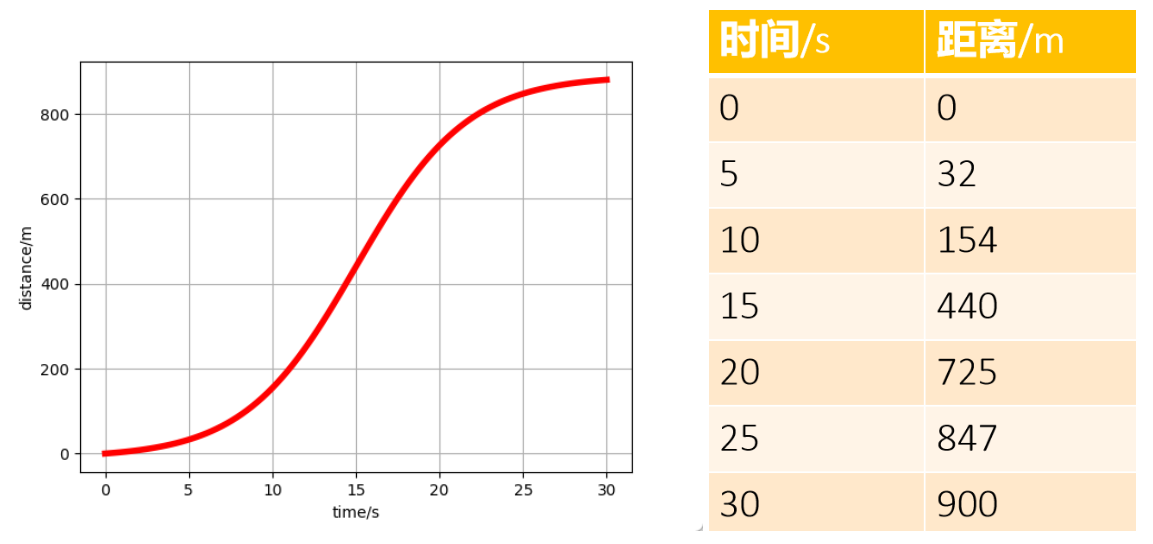
右表表示每间隔5s测一次数据。
在17.5秒时,小车的速度多快?
答案:(725-440)/(20-15) = 57m/s
把多个时间点细分,例如15-20秒,每秒测一次。
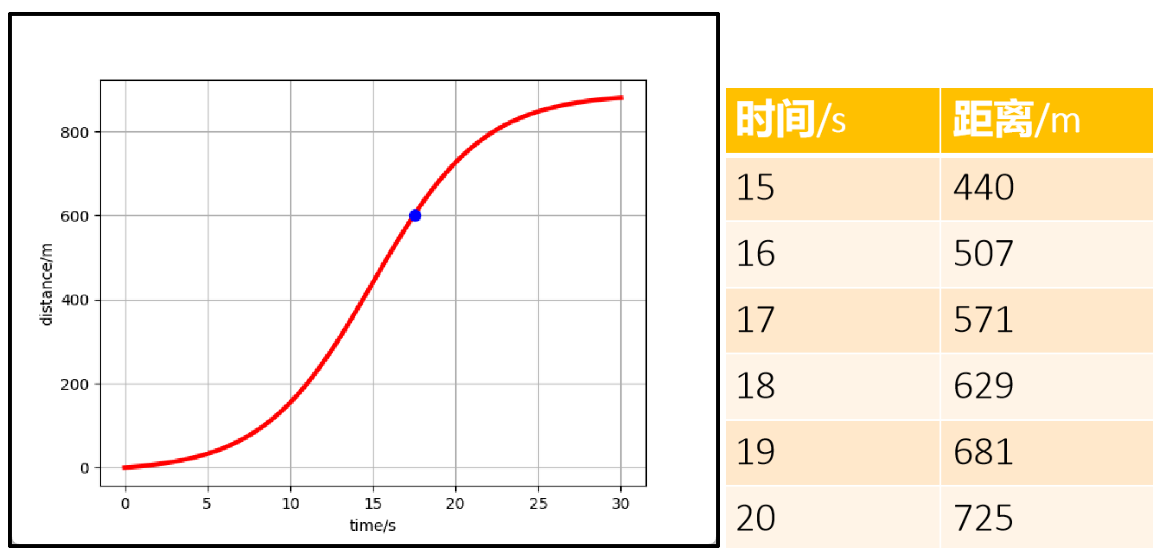
在17.5秒时,小车的速度多快?
答案:(629-571)/(18-17) = 58m/s
通过上面的计算可以得到结论,测速的间隔越小,速度越精准。
此时如果把时间间隔趋向于无穷小,就可以使速度结果无限趋向于真实值。

速度的值,实际上就是所在点的切线斜率。
速度 = 瞬时变化率![]()
拉格朗日表示法:![]()
莱布尼茨表示法:![]()
导数是函数,如果把上图中每个点的斜率都用一个函数表示,这个函数就是“导函数”,通常叫为“导数”。
导函数表示的切线集合可以描述:
- 函数的整体变化趋势
- 也可以表示部分的变化趋势
- 还可以表示某个点的变化趋势
(3) 斜率的极值和最值
【例子】还是刚才的小车,但是小车学会了倒车。
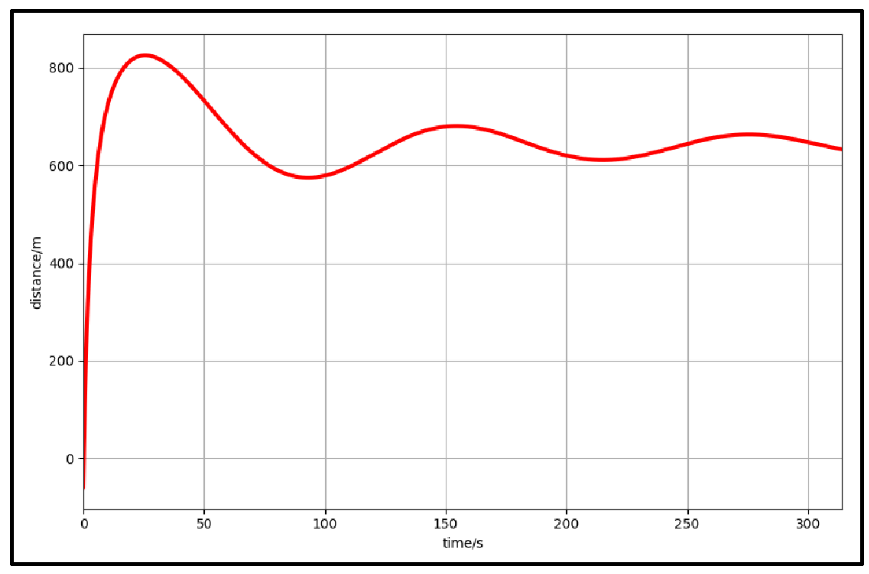
Q1:哪里的速度为0?
A1:斜率为0的点表示速度为0。
Q2:哪里的距离起点最近/最远?
A2:最远或最近的点斜率都为0。
如果上面的图像是损失函数,那么斜率为0的点可能就是损失函数最小值或最大值。
极小值/极大值:局部范围的极值。
最小值/最大值:全局的极值。
这些内容是以后机器学习梯度下降的重要思想。
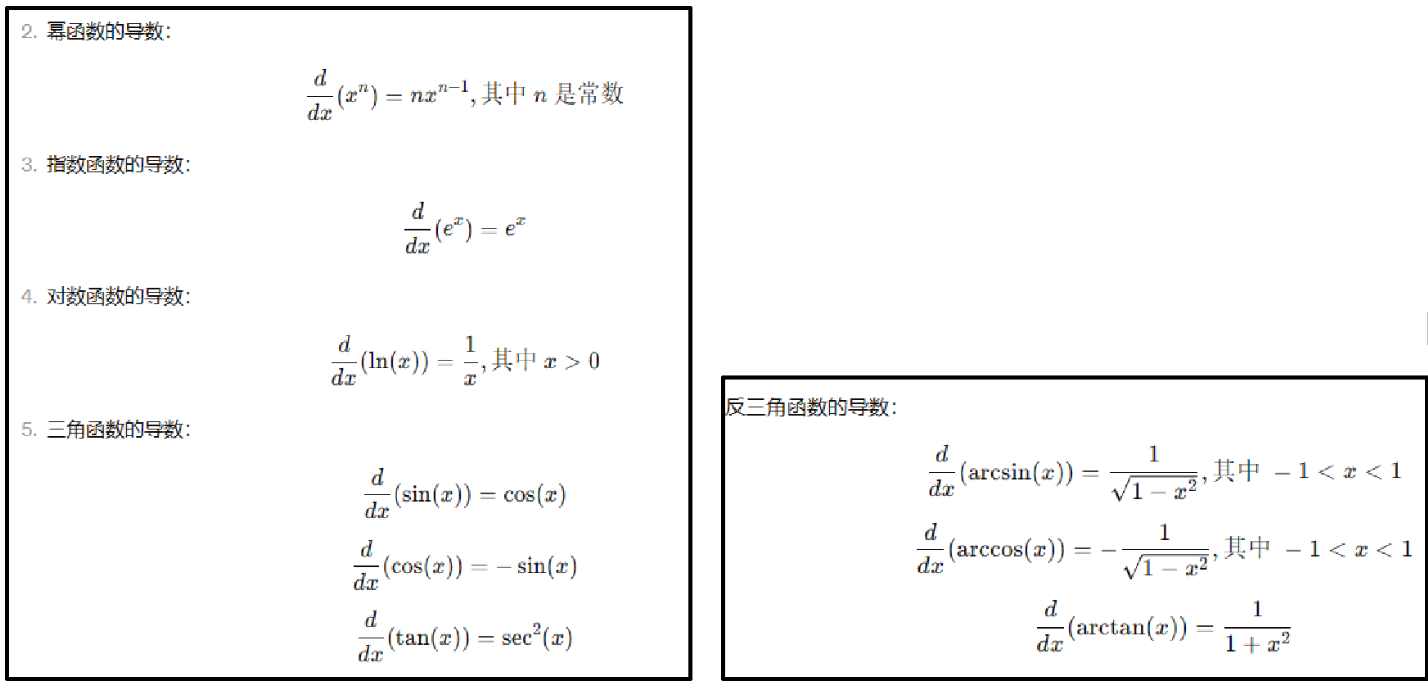
(4)常见的导数
① 常数
结论:![]()
② 线性函数
![]()
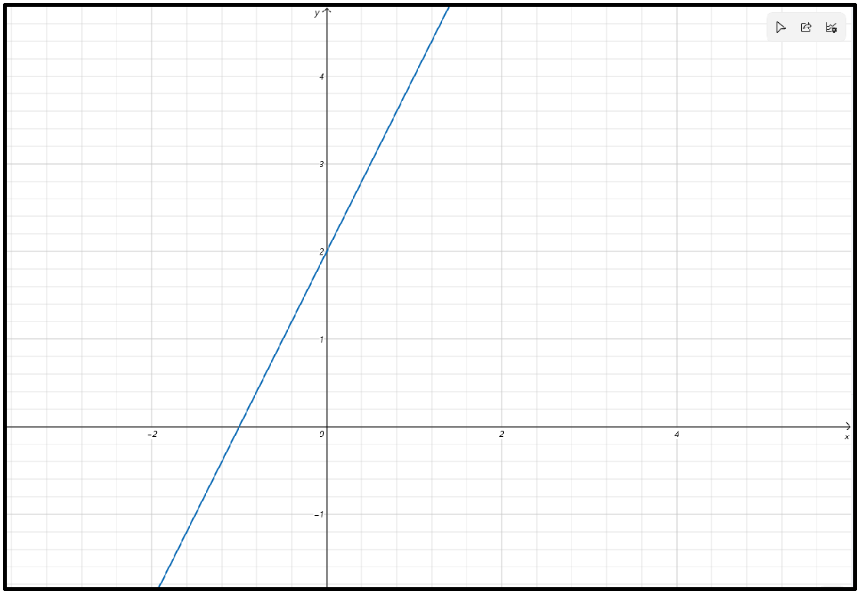
结论:![]()
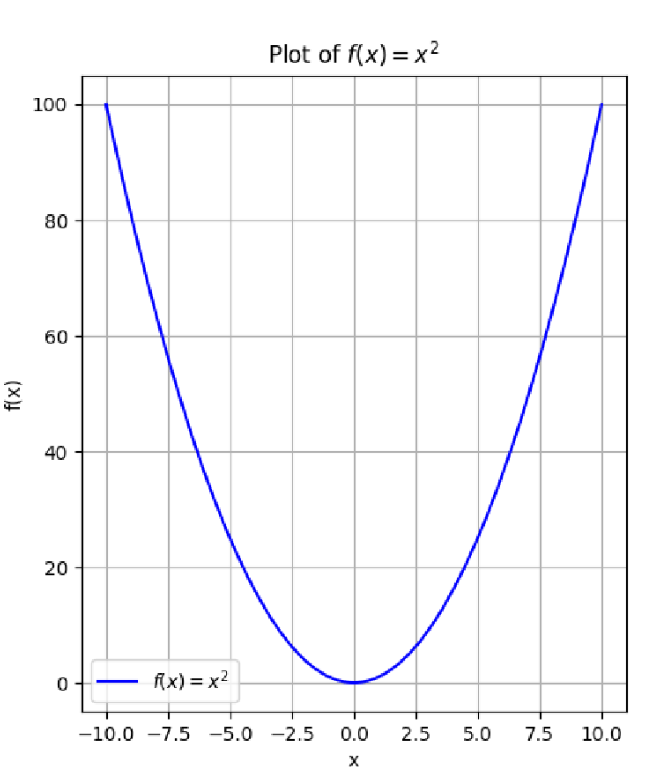
③ 二次方程
![]()
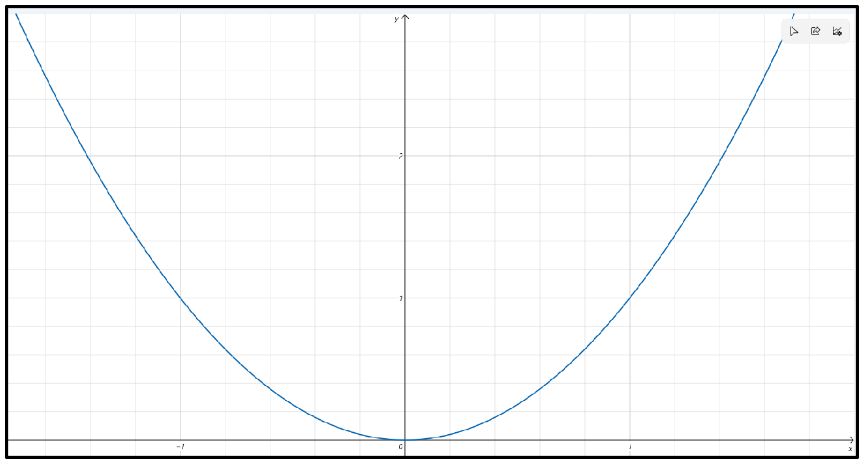
结论:![]()
④ 其他函数
⑤不可微函数
如果一个点存在导数,那么该点的函数会被该点微分。也就是说如果要使函数在整个区间内保持微分,则表示区间中每个点都必须存在导数。
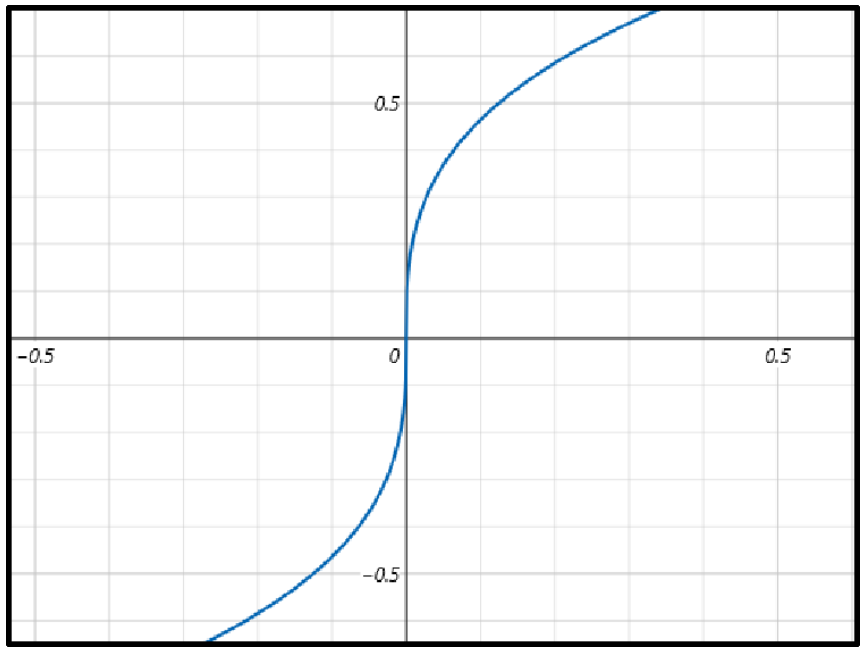
实际上,并不是所有的函数在每个点都能找到导数,这样的函数就是不可微函数,例如:
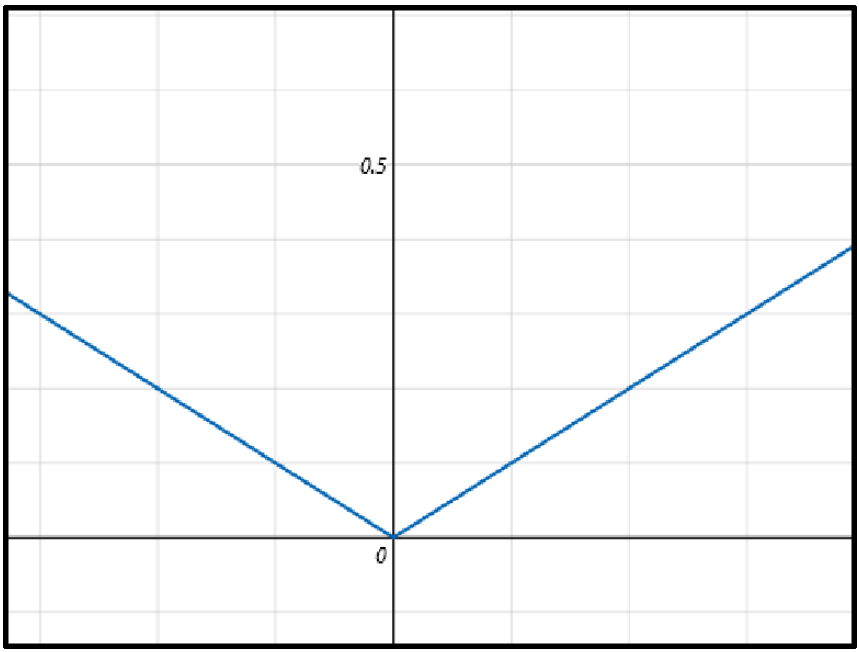
在(0,0)点有无数个切线,所以此点不能求导,这个函数就是不可微函数。
再例如
在(0,0)点切线与y轴重合,表示无穷大,无法求导,此函数也是不可微函数。
(5)导数的性质(微分规则)
①乘以标量
已知![]() ,那么的导数是多少?
,那么的导数是多少?
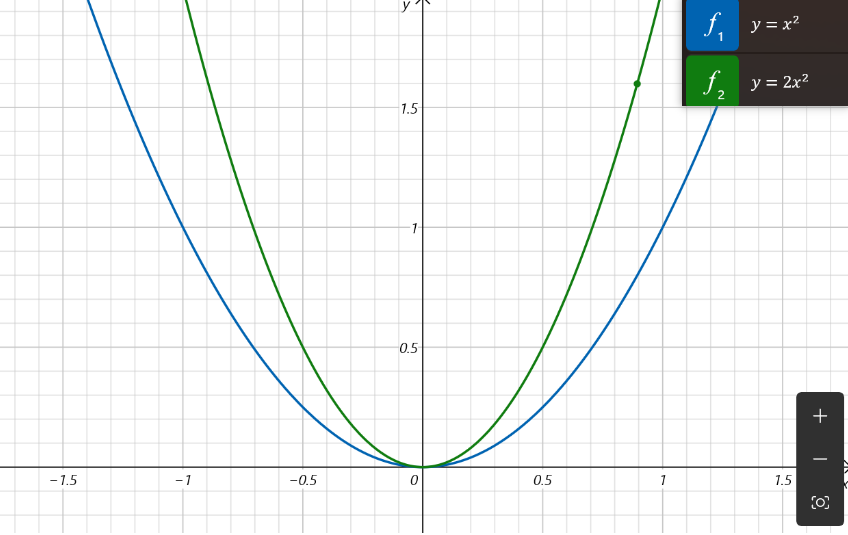
答案:![]()
② 加和法则
绿色为人在船上奔跑的时间和距离,蓝色为船离开码头的时间和距离,红色为人相对码头的时间和距离。
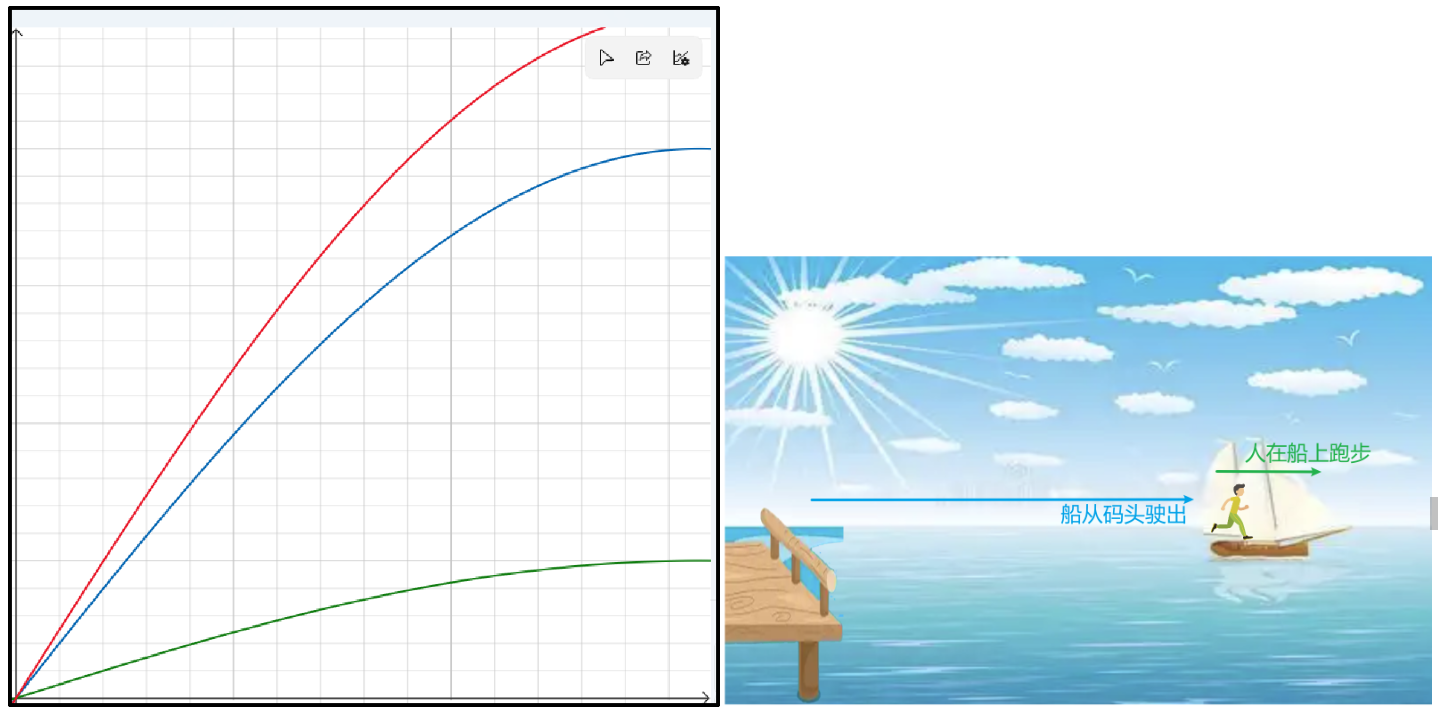
结论:![]()
人距离码头的距离 = 船离开码头的距离+人奔跑的距离
人相对码头的速度 = 船相对码头的速度+人相对于船的速度
③乘法法则
第一个函数是g(x),第二个函数是h(x),f(x)=g(x)h(x),求f'(x)
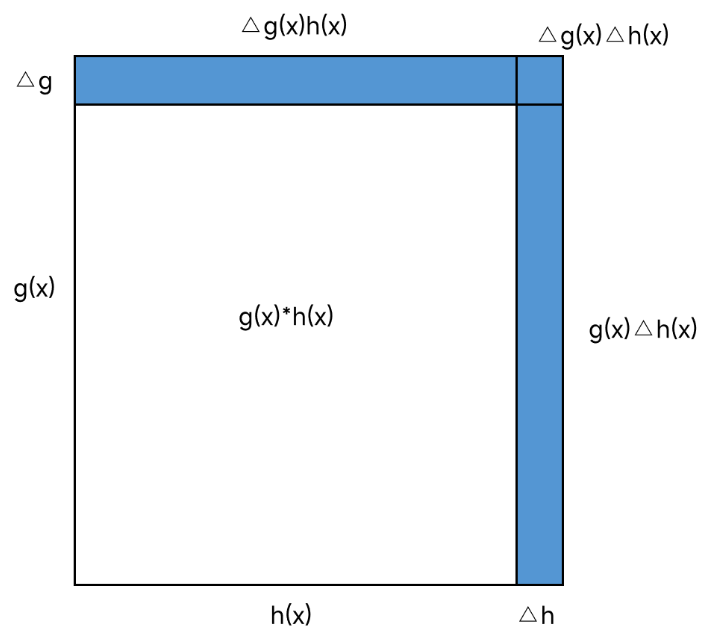

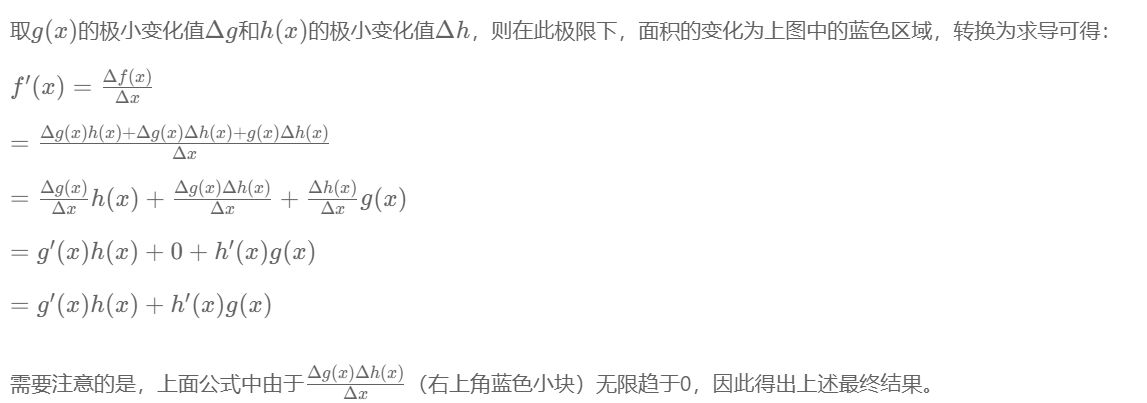
答案:![]()
④ 链式法则
链式法则(Chain Rule)是微积分中用于求复合函数导数的一个基本法则。如果你有一个复合函数,比如,其中y 是 x的函数,g(x)是内函数,f是外函数,那么链式法则允许你分别求出外函数和内函数的导数,然后将它们相乘来求复合函数的导数。
具体来说,链式法则可以表述为:
这里的是外函数f对内函数g(x)的导数,而是内函数g(x)对自变量x的导数。
【例子】
假设有一个复合函数![]() ,求这个函数对x的导数?
,求这个函数对x的导数?
解:
1. 确定内函数和外函数
内函数:![]()
外函数:![]()
2. 分别求导
外函数对内函数的导数:![]()
内函数对x的导数:![]()
3. 应用链式法则![]()
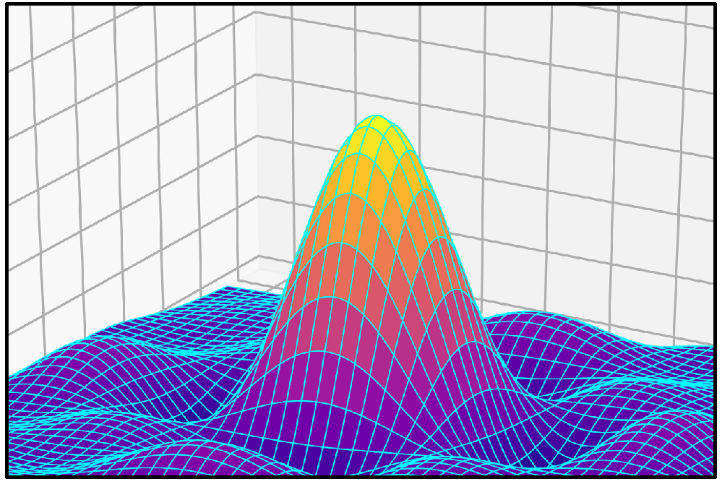
(6) 切平面与偏导数
①输入和输出的数量
之前函数都是一个输入和输出,现在可以拓展到两个输入和一个输出。
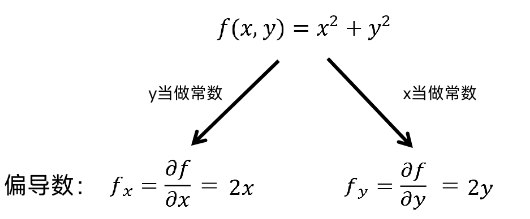
②偏导数
如果把输入的x和y其中一个看做是常数,此时导数就相当于之前的平面导数了,即一个输入的导数。
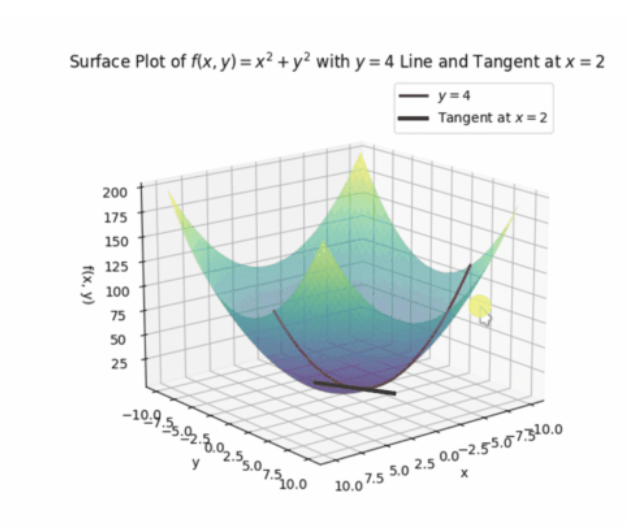
例如当y=4时,可以求出上图中的曲线的偏导数:
![]()
![]()
以上过程就是求偏导的过程,同样也可以让x等于常数,同样可以求偏导。
(8)梯度
可以认为梯度是偏导数的集合。
以 为例,说明梯度的概念。
为例,说明梯度的概念。