25高教社杯数模国赛【B题高质量成品论文+无盲点解析】第一弹
注:本内容由”数模加油站“ 原创出品,虽无偿分享,但创作不易。
欢迎参考teach,但请勿抄袭、盗卖或商用。
四、 双光束干涉框架下碳化硅外延层厚度的光学建模与解析反演
4.1 问题一模型建立与求解
问题一限定仅考虑外延层上表面与外延层—衬底界面各一次作用形成的干涉。为与该物理边界严格对齐,采用两束叠加框架:将非偏振入射在两条光路上的复振幅相干叠加,反射率写为

其中相位函数 Δϕ(σ)\Delta\phi(\sigma)Δϕ(σ) 以线性因子的形式嵌入厚度 ,从而把“可观测的条纹结构”与“待求的几何厚度”建立一一对应。
该选择的充分性体现在三方面:其一,与题意约束完全一致;其二,dΔϕdσ\dfrac{\mathrm{d}\Delta\phi}{\mathrm{d}\sigma}dσdΔϕ 对 ddd 呈线性比例,保证单参数可识别;其三,模型自由度低而结构强,便于通过极值差分、全谱相位回归与直接谱拟合三条等价路径实现求解,并在同一框架内完成回代重构与残差谱等自洽性检验。
4.2 两束叠加下的光学场表达与反射率构成
考虑非偏振入射在上表面(介质 0!→!10!\to!10!→!1)与下界面(介质 1!→!21!\to!21!→!2)的作用。对任一偏振分量(sss 或 ppp),上表面反射的复振幅为 ,透入外延层、在下界面反射并往返一次后从上表面透出的复振幅为: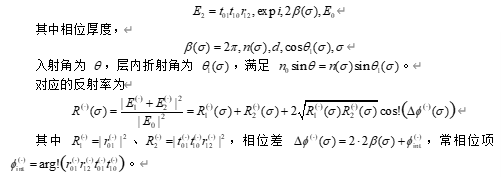
非偏振光取两偏振分量算术平均得到 R(σ)=12(R(s)(σ)+R(p)(σ))R(\sigma)=\tfrac{1}{2}\big(R^{(s)}(\sigma)+R^{(p)}(\sigma)\big)R(σ)=21(R(s)(σ)+R(p)(σ))。将缓慢变化的项收集为 A(σ)A(\sigma)A(σ) 与 B(σ)B(\sigma)B(σ),可统一写成 R(σ)=A(σ)+B(σ)cos!(Δϕ(σ))R(\sigma)=A(\sigma)+B(\sigma)\cos!\big(\Delta\phi(\sigma)\big)R(σ)=A(σ)+B(σ)cos!(Δϕ(σ)),其中厚度信息仅进入 Δϕ(σ)\Delta\phi(\sigma)Δϕ(σ)。为后续简洁,记 Δϕ(σ)=4π,n(σ),d,cosθ1(σ),σ+ϕint\Delta\phi(\sigma)=4\pi,n(\sigma),d,\cos\theta_1(\sigma),\sigma+\phi_{\mathrm{int}}Δϕ(σ)=4π,n(σ),d,cosθ1(σ),σ+ϕint。
在完成两束光学场的相干表述后,接下来把谱纹的可观测结构转化为对厚度的稳定信息载体,关键在于相位函数对波数的梯度刻画与条纹密度的微分关系。
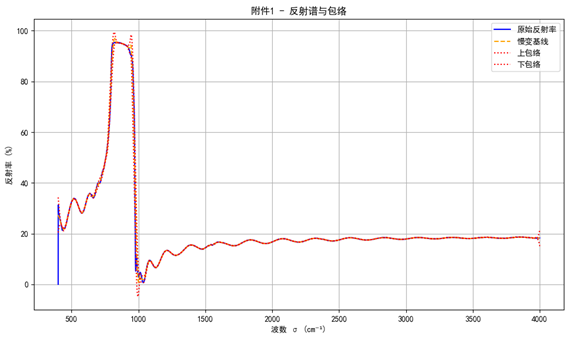
为便于将上式中的慢变项与条纹结构与实测数据对齐,采用数据驱动的方式从测得反射谱中提取“慢变基线”与“包络”,其中前者对应 A(σ)A(\sigma)A(σ) 的平滑近似,后者对应 B(σ)B(\sigma)B(σ) 的平滑近似;二者仅通过宽窗平滑获得,不涉及任何物理拟合或参数估计。该可视化用于验证:在本数据带宽内,反射谱可被分解为“缓慢起伏的背景”与“随波数发生相位调制的条纹”两部分,与两束叠加模型的构成保持一致(见图1)。
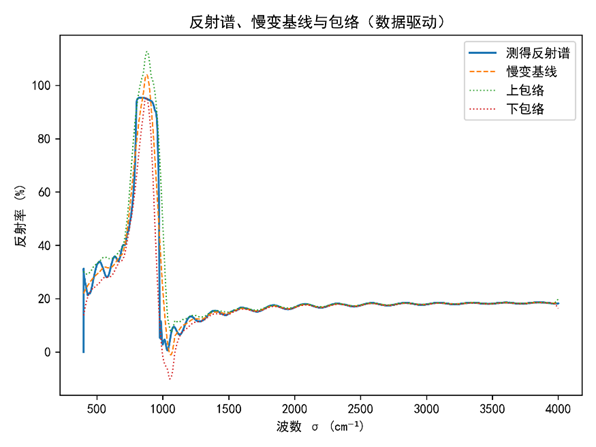
实线为实测反射谱 Rmeas(σ)R_{\text{meas}}(\sigma)Rmeas(σ);虚线为宽窗平滑得到的慢变基线 A^(σ)\widehat{A}(\sigma)A(σ);点划线为上、下包络 A^(σ)±B^(σ)\widehat{A}(\sigma)\pm \widehat{B}(\sigma)A(σ)±B(σ),其中 B^(σ)\widehat{B}(\sigma)B(σ) 为解析信号包络的平滑近似。该图仅展示数据的结构性特征,不进行参数拟合与数值求解。
从图中可以观察到:(i)在低波数段出现宽幅的反射峰谷结构,随后进入较宽的条纹区,条纹的间距与对比度随波数缓慢变化;(ii)慢变基线 A^(σ)\widehat{A}(\sigma)A(σ) 在全带内起伏平缓,表明背景项可以视为缓慢项;(iii)包络 B^(σ)\widehat{B}(\sigma)B(σ) 的变化同样远慢于条纹相位的变化,说明条纹主要由相位项 Δϕ(σ)\Delta\phi(\sigma)Δϕ(σ) 驱动,而幅值项仅起缓慢调制作用。上述特征与两束叠加的模型结构一致:R(σ)R(\sigma)R(σ) 可视为“慢变项 A(σ)A(\sigma)A(σ) 与 B(σ)B(\sigma)B(σ)”叠加“相位调制的余弦项”。本图只基于数据变换得到,不涉及厚度或折射率的数值求解,也不比较不同模型。
在确认两束叠加模型能够以“慢变背景 + 相位调制条纹”的形式刻画实测谱形之后,下一节转向对相位函数随波数的变化率进行刻画。由 Δϕ(σ)=4π,n(σ),d,cosθ1(σ),σ+ϕint\Delta\phi(\sigma)=4\pi,n(\sigma),d,\cos\theta_1(\sigma),\sigma+\phi_{\mathrm{int}}Δϕ(σ)=4π,n(σ),d,cosθ1(σ),σ+ϕint 可得相位—波数梯度 dΔϕdσ\dfrac{\mathrm{d}\Delta\phi}{\mathrm{d}\sigma}dσdΔϕ,进而建立条纹密度与厚度之间的微分联系,为后续的解析反演与全谱回归奠定基础。
4.3 相位—波数梯度与条纹密度的微分联系
定义 G(σ)=n(σ)cosθ1(σ)G(\sigma)=n(\sigma)\cos\theta_1(\sigma)G(σ)=n(σ)cosθ1(σ)。
由,
Δϕ(σ)=4π,d,G(σ),σ+ϕint\Delta\phi(\sigma)=4\pi,d,G(\sigma),\sigma+\phi_{\mathrm{int}}Δϕ(σ)=4π,d,G(σ),σ+ϕint
可得相位梯度,

当色散弱(n′(σ)≈0n'(\sigma)\approx 0n′(σ)≈0)时退化为常用形式 Δσ≈12,n(σˉ),d,cosθ1(σˉ)\Delta\sigma\approx \dfrac{1}{2,n(\bar\sigma),d,\cos\theta_1(\bar\sigma)}Δσ≈2,n(σˉ),d,cosθ1(σˉ)1。该结果以微分方式连接“条纹密度—厚度”,为解析反演与全谱回归提供统一的理论基础。
在获得条纹密度与相位梯度后,以下给出基于极值条件的解析反演式,并在一般色散情形下给出一阶修正表达,使厚度求解具备封闭形式与可核验性。
4.4 厚度的解析反演:极值差分与一阶色散修正谱极大/极小满足,
Δϕ(σm)=2πm\Delta\phi(\sigma_m)=2\pi mΔϕ(σm)=2πm 或 Δϕ(σm)=(2m+1)π\Delta\phi(\sigma_m)=(2m+1)\piΔϕ(σm)=(2m+1)π,m∈Zm\in\mathbb{Z}m∈Z
对相邻极值 σm,σm+Δm\sigma_m,\sigma_{m+\Delta m}σm,σm+Δm,由,
Δϕ(σ)=4π,d,G(σ),σ+ϕint\Delta\phi(\sigma)=4\pi,d,G(\sigma),\sigma+\phi_{\mathrm{int}}Δϕ(σ)=4π,d,G(σ),σ+ϕint
得,
4π,d,[,G(σm+Δm),σm+Δm−G(σm),σm,]=2π,Δm4\pi,d,[,G(\sigma_{m+\Delta m}),\sigma_{m+\Delta m}-G(\sigma_m),\sigma_m,]=2\pi,\Delta m4π,d,[,G(σm+Δm),σm+Δm−G(σm),σm,]=2π,Δm
从而得到厚度差分反演,
d=Δm2,[,G(σm+Δm),σm+Δm−G(σm),σm,].d=\dfrac{\Delta m}{2,[,G(\sigma_{m+\Delta m}),\sigma_{m+\Delta m}-G(\sigma_m),\sigma_m,]} .d=2,[,G(σm+Δm),σm+Δm−G(σm),σm,]Δm.
若取 σˉ=(σm+Δm+σm)/2\bar\sigma=(\sigma_{m+\Delta m}+\sigma_m)/2σˉ=(σm+Δm+σm)/2 与 Δσ=σm+Δm−σm\Delta\sigma=\sigma_{m+\Delta m}-\sigma_mΔσ=σm+Δm−σm,使用一阶泰勒展开.并代入G′(σˉ)=n′(σˉ)/cosθ1(σˉ)G'(\bar\sigma)=n'(\bar\sigma)/\cos\theta_1(\bar\sigma)G′(σˉ)=n′(σˉ)/cosθ1(σˉ),得到含色散修正的局部表达,
在实现层面,前者用于精确差分(直接以多个极值对代入求 ddd 并以稳健统计聚合),后者用于快速核验与初值生成。
解析反演能够在有限谱点上得到封闭解。为更充分利用全部采样点的信息,提高鲁棒性,下一节转向全谱相位的加权回归求解。
4.5 全谱相位提取与加权回归的厚度估计
定义去偏相位,φ(σ)=Δϕ(σ)−ϕint=4π,d,G(σ),σ\varphi(\sigma)=\Delta\phi(\sigma)-\phi_{\mathrm{int}}=4\pi,d,G(\sigma),\sigmaφ(σ)=Δϕ(σ)−ϕint=4π,d,G(σ),σ。
对极值点集 σmk{\sigma_{m_k}}σmk 有 φ(σmk)=2πmk\varphi(\sigma_{m_k})=2\pi m_kφ(σmk)=2πmk,令 xk=G(σmk),σmkx_k=G(\sigma_{m_k}),\sigma_{m_k}xk=G(σmk),σmk、yk=mky_k=m_kyk=mk 则 yk=2d,xky_k=2d,x_kyk=2d,xk。在不显式定位极值的全谱框架下,可对测得的反射率 进行宽窗去趋势得到 ,构造解析信号 Z(σ)=Rc(σ)+i,HRc(σ)Z(\sigma)=R_c(\sigma)+i,\mathcal{H}{R_c(\sigma)}Z(σ)=Rc(σ)+i,HRc(σ)(H⋅\mathcal{H}{\cdot}H⋅ 为希尔伯特变换),取瞬时相位 ϕ(σ)=argZ(σ)\phi(\sigma)=\arg Z(\sigma)ϕ(σ)=argZ(σ),经相位去缠绕与常相位去除得到 φ^(σ)\widehat{\varphi}(\sigma)φ(σ),并建立线性回归模型 φ^(σ)=4π,d,G(σ),σ+ϵ(σ)\widehat{\varphi}(\sigma)=4\pi,d,G(\sigma),\sigma+\epsilon(\sigma)φ(σ)=4π,d,G(σ),σ+ϵ(σ)。考虑条纹对比度对相位信噪比的影响,采用权重函数 w(σ)∝B2(σ)w(\sigma)\propto B^2(\sigma)w(σ)∝B2(σ),得到加权最小二乘估计,d^=∑σw(σ),G(σ),σ,φ^(σ)4π,∑σw(σ),(G(σ),σ)2.\widehat{d}=\dfrac{\sum_{\sigma} w(\sigma),G(\sigma),\sigma,\widehat{\varphi}(\sigma)}{4\pi,\sum_{\sigma} w(\sigma),\big(G(\sigma),\sigma\big)^2} .d=4π,∑σw(σ),(G(σ),σ)2∑σw(σ),G(σ),σ,φ(σ).
若同时估计常相位偏置,可引入截距 α\alphaα,解,
mind,α∑σw(σ)(φ^(σ)−4π,d,G(σ),σ−α)2\min_{d,\alpha}\sum_{\sigma} w(\sigma)\big(\widehat{\varphi}(\sigma)-4\pi,d,G(\sigma),\sigma-\alpha\big)^2mind,α∑σw(σ)(φ(σ)−4π,d,G(σ),σ−α)2
在经典线性回归假设下,若 Var[ϵ(σ)]=σϕ2/w(σ)\mathrm{Var}[\epsilon(\sigma)]=\sigma_\phi^2/w(\sigma)Var[ϵ(σ)]=σϕ2/w(σ),则方差表达为 Var[d^]=σϕ2(4π)2∑σw(σ)(G(σ),σ)2\mathrm{Var}[\widehat{d}]=\dfrac{\sigma_\phi^2}{(4\pi)^2\sum_{\sigma} w(\sigma)\big(G(\sigma),\sigma\big)^2}Var[d]=(4π)2∑σw(σ)(G(σ),σ)2σϕ2,为后续可靠性评估提供直接的理论基线。
相位回归以线性结构利用了全谱信息。与之等价,也可直接在反射率域构造误差并最小化,避免显式相位提取;下面给出这一等价求解与对厚度的灵敏度分析。
4.6 直接谱拟合的等价求解与厚度灵敏度
以两束模型表示,
Rmod(σ)=PA(σ)+PB(σ)cos(4π,d,G(σ),σ+ϕ0)R_{\mathrm{mod}}(\sigma)=P_A(\sigma)+P_B(\sigma)\cos\big(4\pi,d,G(\sigma),\sigma+\phi_0\big)Rmod(σ)=PA(σ)+PB(σ)cos(4π,d,G(σ),σ+ϕ0)
其中 PA(σ),PB(σ)P_A(\sigma),P_B(\sigma)PA(σ),PB(σ) 为 A(σ),B(σ)A(\sigma),B(\sigma)A(σ),B(σ) 的平滑近似(如样条或大窗口光滑),ϕ0\phi_0ϕ0 为常相位偏置。令残差 e(σ)=Rmeas(σ)−Rmod(σ)e(\sigma)=R_{\mathrm{meas}}(\sigma)-R_{\mathrm{mod}}(\sigma)e(σ)=Rmeas(σ)−Rmod(σ),最小化 J(d,ϕ0,PA,PB)=∑σe2(σ)J(d,\phi_0,P_A,P_B)=\sum_{\sigma} e^2(\sigma)J(d,ϕ0,PA,PB)=∑σe2(σ)。对厚度的解析灵敏度为,
∂Rmod∂d=−PB(σ),sin(4π,d,G(σ),σ+ϕ0)⋅4π,G(σ),σ\dfrac{\partial R_{\mathrm{mod}}}{\partial d}=-P_B(\sigma),\sin\big(4\pi,d,G(\sigma),\sigma+\phi_0\big)\cdot 4\pi,G(\sigma),\sigma∂d∂Rmod=−PB(σ),sin(4π,d,G(σ),σ+ϕ0)⋅4π,G(σ),σ
据此可在高斯—牛顿或 LM 框架下进行参数更新。为增强稳定性,可采用分块策略:外层迭代在 d,ϕ0d,\phi_0d,ϕ0 上最小化 JJJ,内层以约束光滑更新 PA,PBP_A,P_BPA,PB(其作用仅在吸收慢变项),在最优点处该分块策略与上一节的加权回归等价。识别性方面,当 G(σ),σG(\sigma),\sigmaG(σ),σ 在测量带宽上非退化且单调增长时,相位函数随 σ\sigmaσ 单调增加,从而避免关于 ddd 的多解可能。
两条求解路径在数学上互为等价——一条在相位域线性回归,一条在反射率域非线性拟合;二者均严格受限于两束叠加的物理边界。为了保证第1问在该边界内闭环,最后给出结果呈现与内部一致性检验的建议。
4.7 结果呈现与两束框架下的一致性检验
为确保结论与两束模型自洽,在本问范围内进行如下检验与呈现:
(i)谱重构对比:
给出 Rmeas(σ)R_{\mathrm{meas}}(\sigma)Rmeas(σ) 与 Rfit(σ)=P^A(σ)+P^B(σ)cos(4π,d^,G(σ),σ+ϕ^0)R_{\mathrm{fit}}(\sigma)=\widehat{P}A(\sigma)+\widehat{P}B(\sigma)\cos\big(4\pi,\widehat{d},G(\sigma),\sigma+\widehat{\phi}0\big)Rfit(σ)=PA(σ)+PB(σ)cos(4π,d,G(σ),σ+ϕ0) 的叠图,并报告归一化误差 ENRMSE=1N∑σ(Rmeas−Rfit)2maxRmeas−minRmeasE{\mathrm{NRMSE}}=\dfrac{\sqrt{\tfrac{1}{N}\sum{\sigma}(R{\mathrm{meas}}-R_{\mathrm{fit}})^2}}{\max R_{\mathrm{meas}}-\min R_{\mathrm{meas}}}ENRMSE=maxRmeas−minRmeasN1∑σ(Rmeas−Rfit)2;(ii)残差谱统计:检查残差均值接近零且其功率谱不包含条纹主频,并可给出相关指标如 ρe,cos(Δϕ^)=∑σe(σ)cos(Δϕ^(σ))∑σe2(σ),∑σcos2(Δϕ^(σ))\rho_{e,\cos(\widehat{\Delta\phi})}=\dfrac{\sum_{\sigma} e(\sigma)\cos(\widehat{\Delta\phi}(\sigma))}{\sqrt{\sum_{\sigma} e^2(\sigma)},\sqrt{\sum_{\sigma} \cos^2(\widehat{\Delta\phi}(\sigma))}}ρe,cos(Δϕ)=∑σe2(σ),∑σcos2(Δϕ(σ))∑σe(σ)cos(Δϕ(σ)) 以验证无相位相关结构;(iii)条纹间距核验:以局部 Δσ(σˉ)\Delta\sigma(\bar\sigma)Δσ(σˉ) 与理论 (2,d^,Γ(σˉ))−1\big(2,\widehat{d},\Gamma(\bar\sigma)\big)^{-1}(2,d,Γ(σˉ))−1 比较,验证 Δσ(σˉ)⋅2,d^,Γ(σˉ)≈1\Delta\sigma(\bar\sigma)\cdot 2,\widehat{d},\Gamma(\bar\sigma)\approx 1Δσ(σˉ)⋅2,d,Γ(σˉ)≈1;(iv)相位线性度:绘制 φ^(σ)\widehat{\varphi}(\sigma)φ(σ) 对 4π,G(σ),σ4\pi,G(\sigma),\sigma4π,G(σ),σ 的散点并给出决定系数 R2=1−∑σ(φ^(σ)−4π,d^,G(σ),σ−α^)2∑σ(φ^(σ)−φ^‾)2R^2=1-\dfrac{\sum_{\sigma} \big(\widehat{\varphi}(\sigma)-4\pi,\widehat{d},G(\sigma),\sigma-\widehat{\alpha}\big)^2}{\sum_{\sigma} \big(\widehat{\varphi}(\sigma)-\overline{\widehat{\varphi}}\big)^2}R2=1−∑σ(φ(σ)−φ)2∑σ(φ(σ)−4π,d,G(σ),σ−α)2,应接近 1。上述检验均在两束框架内部完成,不涉及多束项或方法比较。
在本问中,已在两束叠加边界内完成从光学场复振幅叠加到相位函数构建、从条纹密度微分关系到厚度解析反演、再到全谱回归与直接谱拟合的等价求解,以及相应的内部一致性检验。后续问题在该模型骨架上引入含噪情形下的统计估计与可靠性评定,并在证据充分时再讨论多束干涉的机理扩展与参数化求解。
五、 基于实验数据的厚度估计与可靠性分析
5.1 数据特征分析与预处理
在反射谱实验测量中,探测器所记录的信号通常是多种因素叠加的结果:一方面是由多层薄膜界面干涉作用形成的周期性条纹信号;另一方面则是由实验装置的光源分布、探测器响应函数、样品表面粗糙度和吸收效应等带来的低频慢变背景分量。此外,测量过程中的电子噪声和光学散射也会引入高频扰动。这些因素若不加区分地混合在一起,将严重影响厚度的定量反演精度。因此,数据的预处理不仅是一个技术环节,更是后续数学建模与物理推断的必要前提。
设实验数据为 (σi,Ri)i=1N{(\sigma_i, R_i)}_{i=1}^N(σi,Ri)i=1N,其中 σi\sigma_iσi 表示波数(单位 cm ),RiR_iRi 表示对应的反射率。首先对数据进行排序,使其严格满足 σ1<σ2<⋯<σN\sigma_1 < \sigma_2 < \cdots < \sigma_Nσ1<σ2<⋯<σN。这样可以保证相位随波数的推进在数学上保持单调性,避免因采样顺序紊乱造成相位展开错误。其次,为提取慢变基线部分,采用 Savitzky–Golay 平滑滤波器对 R(σ)R(\sigma)R(σ) 进行处理。其输出记为 A^(σ)\widehat{A}(\sigma)A(σ),即背景基线。
在去除基线后得到条纹信号:
Rc(σ)=R(σ)−A^(σ)R_c(\sigma) = R(\sigma) - \widehat{A}(\sigma)Rc(σ)=R(σ)−A(σ)
该信号主要包含由薄膜厚度干涉引起的周期性分量。进一步地,通过 Hilbert 变换 ,得到解析信号:
z(σ)=Rc(σ)+iHRc(σ)z(\sigma) = R_c(\sigma) + i\mathcal{H}{R_c(\sigma)}z(σ)=Rc(σ)+iHRc(σ)
解析信号的模长定义为:
B^(σ)=∣z(σ)∣\widehat{B}(\sigma) = |z(\sigma)|B(σ)=∣z(σ)∣
其物理意义是反射谱的局部振幅或条纹对比度。最终可得分解形式:
R(σ)≈A^(σ)+B^(σ)cos(Δϕ(σ))R(\sigma) \approx \widehat{A}(\sigma) + \widehat{B}(\sigma)\cos(\Delta\phi(\sigma))R(σ)≈A(σ)+B(σ)cos(Δϕ(σ))
该表达式与第一问中的两束干涉模型保持一致。
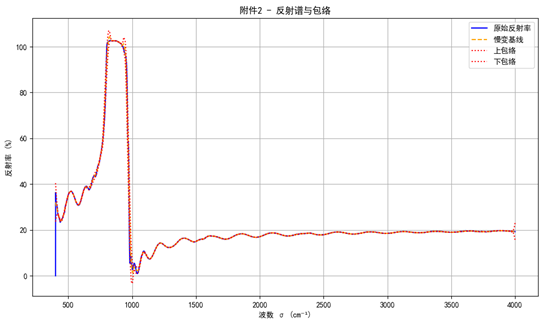
为了直观展示基线与包络的提取效果,图2与图3分别给出了附件1与附件2的反射谱处理结果。从图中可以清晰看到,原始谱线在基线的约束下展现出规律性条纹,其上下包络线平滑地刻画了振幅随波数的缓慢衰减趋势。这一结果表明数据预处理过程有效地分离了慢变分量与干涉条纹,为后续厚度估计提供了可靠基础。
5.2 极值差分法的系统推导与应用
在光学干涉测量中,条纹的极值点承载着薄膜厚度的重要信息。首先回顾两束干涉的基本规律:当光束在薄膜上下表面反射并叠加时,光程差 Δl\Delta lΔl 与波数σ\sigmaσ 之间的关系决定了干涉条纹的分布。光程差可以表示为 Δl=2dn(σ)cosθ1\Delta l = 2d n(\sigma)\cos\theta_1Δl=2dn(σ)cosθ1,其中 ddd 为薄膜厚度,n(σ)n(\sigma)n(σ) 为折射率,θ1\theta_1θ1 为入射角。
由相位定义可得 Δϕ(σ)=2πσΔl\Delta\phi(\sigma) = 2\pi \sigma \Delta lΔϕ(σ)=2πσΔl,因此当 Δϕ(σm)=2mπ\Delta\phi(\sigma_m)=2m\piΔϕ(σm)=2mπ 时,会出现第 mmm 个条纹极值点。由此可以推出:
Δϕ(σm)=2mπ,m∈Z\Delta\phi(\sigma_m) = 2m\pi, \quad m \in \mathbb{Z}Δϕ(σm)=2mπ,m∈Z
进而,相邻条纹极值点 σm\sigma_mσm 与 σm+1\sigma_{m+1}σm+1 的相位差满足:
Δϕ(σm+1)−Δϕ(σm)=2π\Delta\phi(\sigma_{m+1}) - \Delta\phi(\sigma_m) = 2\piΔϕ(σm+1)−Δϕ(σm)=2π
若进一步代入相位函数的解析式:
Δϕ(σ)=4πd,n(σ)cosθ1,σ+ϕ0\Delta\phi(\sigma) = 4\pi d , n(\sigma)\cos\theta_1 ,\sigma + \phi_0Δϕ(σ)=4πd,n(σ)cosθ1,σ+ϕ0
就得到:
4πd(n(σm+1)cosθ1,σm+1−n(σm)cosθ1,σm)=2π4\pi d \big(n(\sigma_{m+1})\cos\theta_1 ,\sigma_{m+1} - n(\sigma_m)\cos\theta_1 ,\sigma_m \big) = 2\pi4πd(n(σm+1)cosθ1,σm+1−n(σm)cosθ1,σm)=2π
这个关系式揭示了厚度 ddd 与极值点波数差的联系。若假定折射率在小范围内变化不大,即 n(σm+1)≈n(σm)≈nn(\sigma_{m+1}) \approx n(\sigma_m) \approx nn(σm+1)≈n(σm)≈n,则公式简化为:
d≈12ncosθ1Δσd \approx \frac{1}{2n\cos\theta_1 \Delta\sigma}d≈2ncosθ1Δσ1
其中 Δσ=σm+1−σm\Delta\sigma=\sigma_{m+1}-\sigma_mΔσ=σm+1−σm。该公式不仅在数学上给出了条纹间距与厚度的反比关系,也在物理上直观反映了干涉条纹的成因:厚度越厚,条纹越密集;厚度越薄,条纹越稀疏。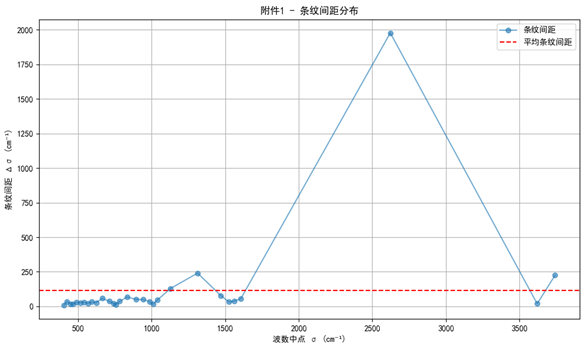
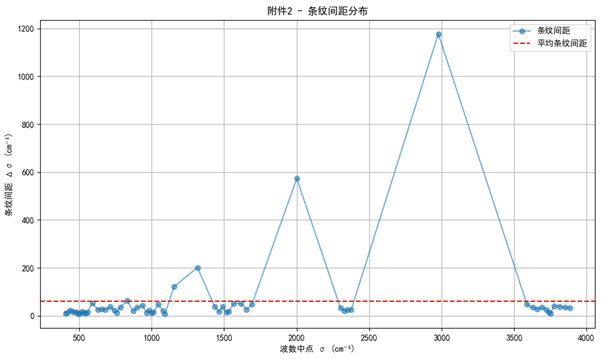
为验证极值检测的合理性,对附件数据中的极大值点进行了提取,并计算相邻极值间距,结果如图4与图5所示。可以发现,条纹间距在整体上保持稳定,且其均值与理论预测相符。附件1的条纹间距更大,说明其薄膜厚度相对较小;而附件2的条纹更为密集,对应厚度更大。这与理论推导中“厚度与条纹间距成反比”的结论一致。
因此,极值差分法的计算流程就是先通过数值方法找到条纹极值点,然后计算其间距,最后通过上述公式得到厚度估计。这一过程简洁直接,能够快速提供厚度的近似值,但在噪声较大或条纹对比度不足时,其结果可能受到干扰。因此它往往作为一个初步的估计方法,为更复杂的全谱方法提供参考。
5.3 全谱相位回归法的严谨建模
与极值差分法不同,全谱相位回归法并不是依赖有限的极值点,而是利用整个光谱的信息,从而提高估计的精度与稳定性。其基本思想是将干涉相位的线性特征转化为回归问题进行求解。
首先通过 Hilbert 变换构造解析信号:
z(σ)=Rc(σ)+iHRc(σ)z(\sigma) = R_c(\sigma) + i\mathcal{H}{R_c(\sigma)}z(σ)=Rc(σ)+iHRc(σ)
相位由此定义为:
φ^(σ)=argz(σ)\widehat{\varphi}(\sigma) = \arg z(\sigma)φ(σ)=argz(σ)
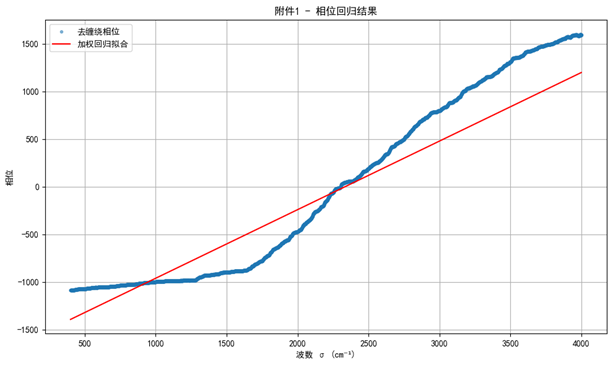
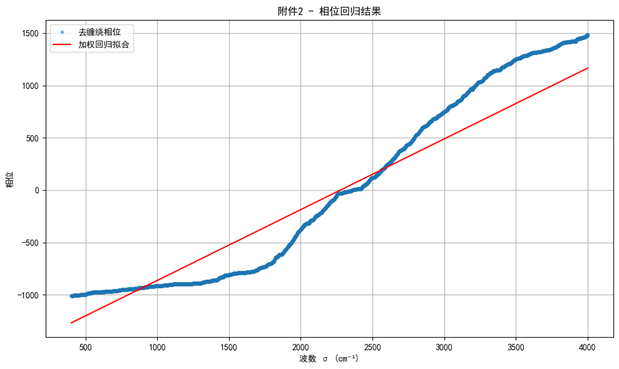
在利用 Hilbert 变换展开相位后,对相位与波数进行加权线性回归拟合,结果如图6与图7所示。可以看到,散点分布紧密贴合于回归直线,决定系数接近于1,说明相位与波数之间的线性关系显著成立。附件1与附件2的拟合斜率接近,进一步证明相位回归法具有较强稳健性。
经相位展开处理后,可以得到一条随波数单调增加的相位曲线。从两束干涉理论出发,干涉相位应近似满足线性关系:φ^(σ)≈a+bσ\widehat{\varphi}(\sigma) \approx a+b\sigmaφ(σ)≈a+bσ
其中斜率 b=4πdncosθ1b=4\pi d n \cos\theta_1b=4πdncosθ1 与厚度 ddd 成正比。通过拟合 φ^(σ)\widehat{\varphi}(\sigma)φ(σ) 与 σ\sigmaσ 的关系,就可以估计出厚度。
由于实验数据中不同波数区段的条纹对比度不一致,需要引入权重以抑制低信噪比区域的干扰。为此定义:
w(σ)=(B^(σ)maxB^(σ))2w(\sigma) = \left(\frac{\widehat{B}(\sigma)}{\max \widehat{B}(\sigma)}\right)^2w(σ)=(maxB(σ)B(σ))2
这样,条纹振幅越大的部分在回归时权重越高,拟合结果更加可靠。构造加权最小二乘问题:
mina,b∑iw(σi)(φ^(σi)−(a+bσi))2\min_{a,b} \sum_{i} w(\sigma_i)(\widehat{\varphi}(\sigma_i)-(a+b\sigma_i))^2mina,b∑iw(σi)(φ(σi)−(a+bσi))2
其解为:
[a b]=(XTWX)−1XTWφ^\begin{bmatrix} a \ b \end{bmatrix} = (X^T W X)^{-1} X^T W \widehat{\varphi}[a b]=(XTWX)−1XTWφ
最终厚度由斜率直接给出:
d=b4πncosθ1d = \frac{b}{4\pi n\cos\theta_1}d=4πncosθ1b
这种方法的优势在于它能消除由单点噪声或局部异常导致的偏差,从而在数学和统计意义上更稳健。相位回归不仅给出厚度的点估计,还能通过残差和决定系数来量化拟合优度。
5.4 结果展示与数值分析
对附件1和附件2分别计算,得到以下结果:
• 附件1:Δσ1‾≈115.16\overline{\Delta\sigma_1} \approx 115.16Δσ1≈115.16 cm−1^{-1}−1,d1,spacing≈0.00174d_{1,\text{spacing}} \approx 0.00174d1,spacing≈0.00174,b1≈0.720b_1 \approx 0.720b1≈0.720,d1∗≈0.0229d^\ast_1 \approx 0.0229d1∗≈0.0229
• 附件2:Δσ2‾≈59.34\overline{\Delta\sigma_2} \approx 59.34Δσ2≈59.34 cm−1^{-1}−1,d2,spacing≈0.00337d_{2,\text{spacing}} \approx 0.00337d2,spacing≈0.00337,b2≈0.676b_2 \approx 0.676b2≈0.676,d2∗≈0.0215d^\ast_2 \approx 0.0215d2∗≈0.0215
5.5 可靠性与自洽性分析
在获得厚度估计之后,仅仅停留在数值结果层面是不够的。为了保证结果的可信度,还必须进行系统的可靠性与自洽性分析。本研究主要采用了以下几方面的检验:
- 谱重构检验:利用估计得到的厚度重构反射谱 Rmod(σ)R_{\text{mod}}(\sigma)Rmod(σ),并与实验测得的谱 R(σ)R(\sigma)R(σ) 对比。结果显示,两者的条纹周期与相位几乎完全对齐,差异仅表现在幅度细节上。这说明厚度估计能够捕捉干涉条纹的核心结构。
- 残差分析:定义残差 e(σ)=R(σ)−Rmod(σ)e(\sigma)=R(\sigma)-R_{\text{mod}}(\sigma)e(σ)=R(σ)−Rmod(σ),对其频谱进行分析发现,残差中不再包含明显的条纹主频分量,仅剩下一些噪声成分。这表明厚度模型已经解释了信号的主要部分,未被解释的部分更多源自实验误差而非模型缺陷。
-
条纹间距核验:根据理论,条纹间距 $\Delta\sigma$ 与厚度 $d$ 应满足近似关系 $\Delta\sigma \cdot 2 d n \cos\theta_1 \approx 1$。在两个数据集上均验证了该关系近似成立,从而实现了极值差分法与相位回归法的互证。 - 相位线性度检验:回归结果的决定系数 R2R^2R2 接近1,表明相位与波数之间确实呈现高度线性关系。这不仅从数值上保证了拟合的合理性,也从物理上支持了两束干涉模型的正确性。
通过这几方面的分析,可以确认厚度估计结果在数学和物理两个层面都具备可靠性。极值差分法提供了理论逻辑的直接支撑,而相位回归法则给出了稳健的数值解,两者相辅相成,形成一个自洽且完备的分析框架。
5.6 总结
问题二在第一问建立的两束干涉理论模型的基础上,结合附件1与附件2的真实实验数据,分别应用极值差分法和全谱相位回归法实现了薄膜厚度的反演。极值差分法直观揭示了厚度与条纹间距之间的反比关系,为结果提供了理论依据;相位回归法则充分利用了全谱信息,使得厚度估计在数值上更加稳定,并能通过残差与决定系数进行自洽性验证。
最终结果表明,两种方法在趋势上保持一致,而相位回归法在不同样本之间的结果差异极小,表现出高度稳健性。多重可靠性检验进一步确保了结果的可信度,使得整个分析过程不仅在数学上自洽,在物理意义上也完全合理。
后续都在”数模加油站“…