Buck的Loadline和DVS区别和联系
Buck 电路设计中,有两个概念,一个是Load-Line,一个是DVS,它们的含义是什么呢。
Load-Line(也称为有源电压定位,AVP)是通过调整BUCK电路的输出电压,使其根据负载电流动态变化的技术。其公式为:

其中 VOUT(NOM) 是无负载连接到电源时的最大VOUT, IOUT 是负载电流,RLL 则是等效Load-Line阻抗。可以看到随着Iout的增加,Vout线性下降。但VOUT 必须落在指定的电压限制范围 (VMAX 和 VMIN) 之内,使负载能够正常工作。
Load-Line调节的主要目的是在负载电流较大时降低电压,从而降低功耗和耗散损耗。这是它最常见的益处,实施Load-Line控制还有一个优点,就是可以改善服务器的动态响应。
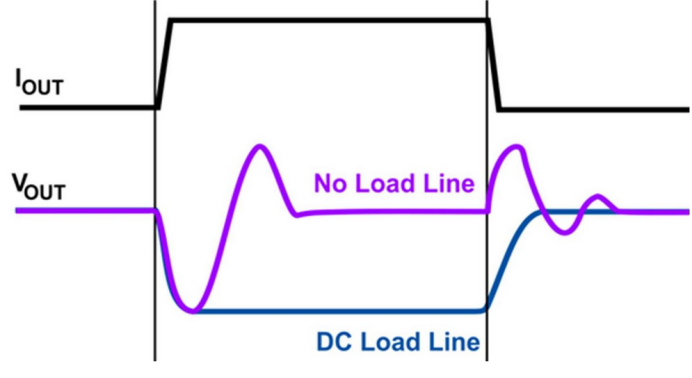
上图是负载电流跳变时,有Load-Line和没有Load-Line的响应图。没有Load-Line的电源(用紫色线表示)在负载瞬变期间会出现较大的过冲和下冲。这些峰值超过最大或最小电压限制都可能导致负载损坏并停止工作,但通过使用Load-Line(用蓝色线表示)逐步调节 VOUT,则可以消除这些峰值并改善瞬态响应
。
所以通过Load-Line的设计,可以优化瞬态响应性能,满足服务器等对电压波动敏感场景的需求;同时降低输出电容容值要求,减小系统体积和成本。
DVS技术通过动态调整BUCK电路的输出电压值,在保证系统性能的前提下降低功耗,根据处理器负载状态,实时调节供电电压以匹配算力需求;应用于便携设备(如手机、笔记本电脑),延长电池续航。
如给手机处理器供电的应用场景,可以将电源的供能模式可分为三个模式:省电模式(低压低电流),平衡模式(低压大电流),高性能模式(高压大电流)。根据性能需要切换供能模式,这也是电源的最优化供电策略。
DVS 实现方式:1)数字控制:采用PID算法或状态空间模型,实现快速、无过冲的电压切换;2)硬件支持:部分控制器集成VID(电压识别)引脚,通过数字信号直接设定目标电压。
两者的区别与联系为:
