YOLO13正式发布!考虑将yolov13的创新点融合到半监督中,构建YOLOv13_ssod
YOLO13技术解析:超图关联增强与全流程聚合分发范式
前言
随着深度学习技术的快速发展,目标检测领域迎来了又一次重大突破。YOLO13作为YOLO系列的最新成员,于2025年6月正式发布,带来了革命性的架构创新。本文将深入解析YOLO13的核心技术特点,探讨其在目标检测领域的突破性贡献。
YOLO13架构概览
整体设计理念
YOLO13摒弃了传统YOLO系列"主干网络→颈部网络→检测头"的线性计算范式,创新性地引入了超图关联增强机制(HyperACE)和全流程聚合分发范式(FullPAD),实现了从局部优化到全局协同的架构升级。
核心架构组件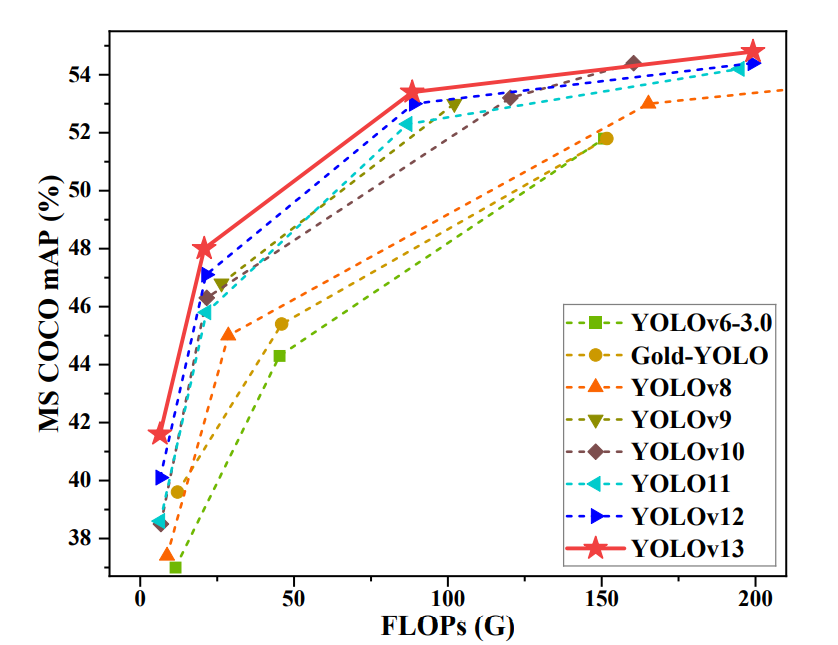
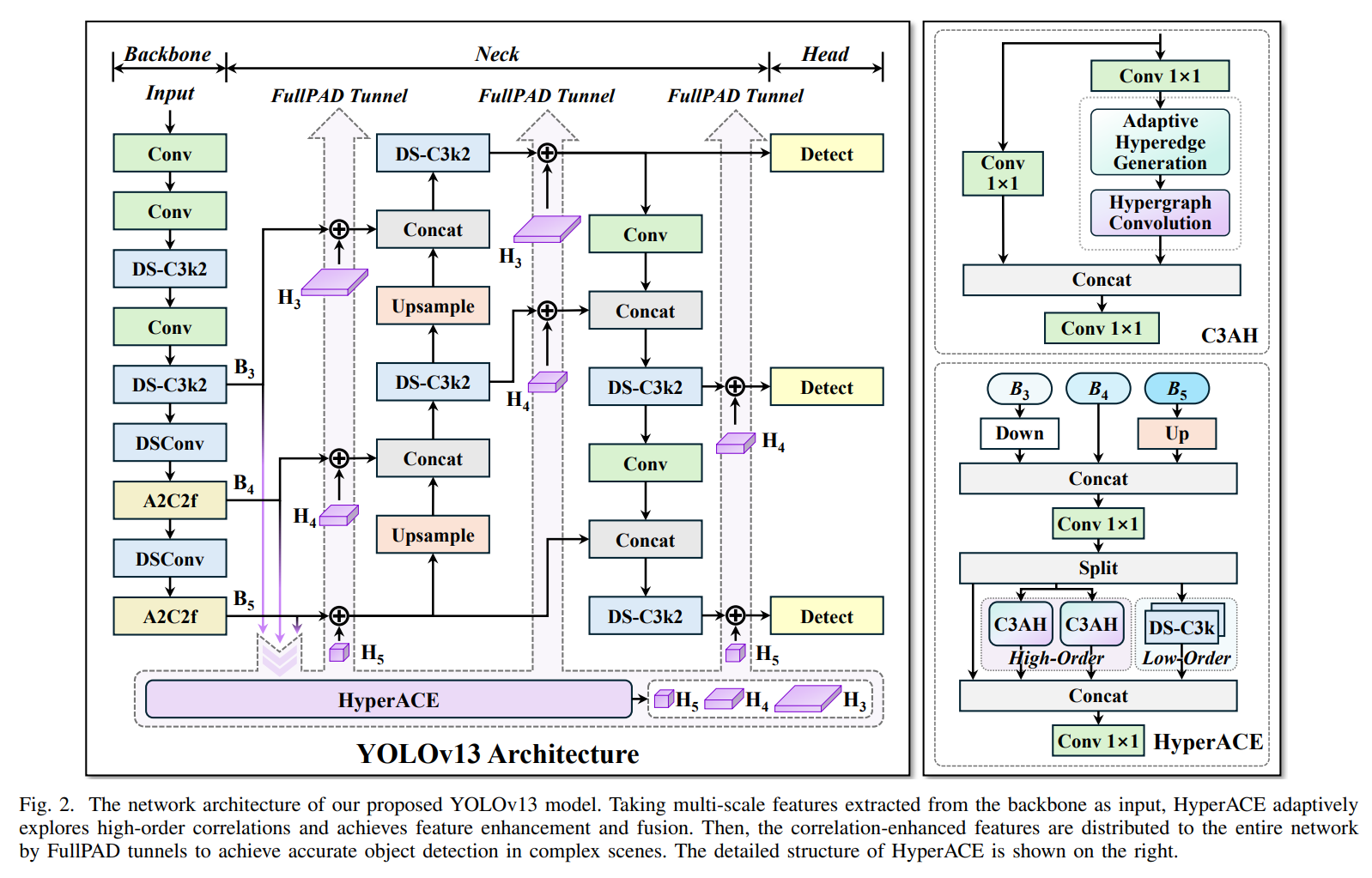
1. 轻量化主干网络
- 采用DS-C3k2模块替代传统大核卷积
- 提取多尺度特征图[B1,B2,B3,B4,B5]
- 在保持性能的同时显著降低参数量
2. 三阶段处理流程
- 超图关联增强阶段:通过HyperACE模块建立跨尺度/跨位置的高阶特征关联
- 全流程特征分发阶段:基于FullPAD范式的三条独立隧道实现精准特征分发
- 检测输出阶段:优化后的颈部网络输出特征图馈入检测头
核心技术创新
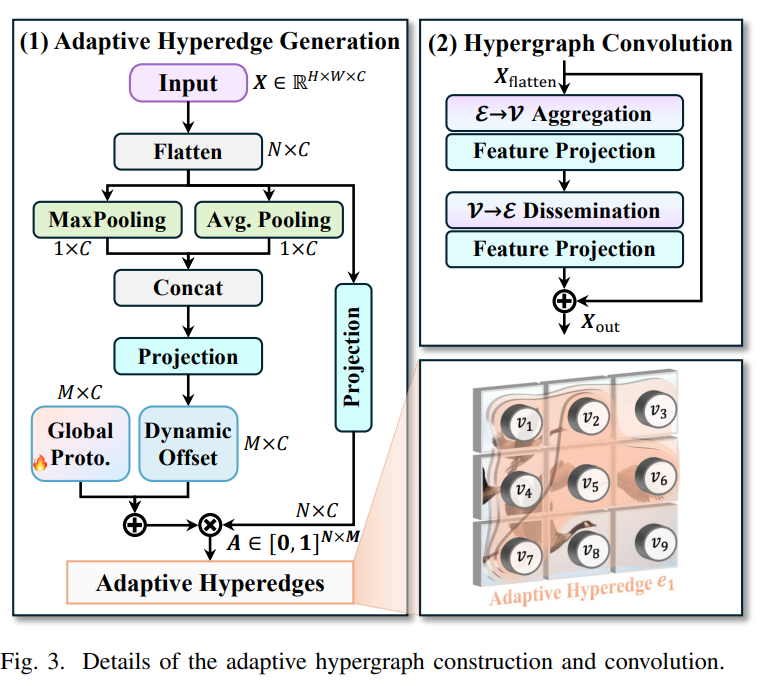
1. 超图关联增强机制(HyperACE)
传统方法仅限于基于超图计算的成对关联建模,而HyperACE实现了质的飞跃:
技术优势:
- 高阶关联挖掘:自适应发现潜在的复杂特征关系
- 全局跨位置融合:打破空间局限性,实现全局特征交互
- 跨尺度特征增强:有效整合不同尺度的特征信息
- 计算效率优化:相比传统方法减少30%的计算开销
实现原理:
# HyperACE伪代码示例
def HyperACE(multi_scale_features):# 构建超图结构hypergraph = build_hypergraph(multi_scale_features)# 自适应关联增强enhanced_features = adaptive_correlation_enhancement(hypergraph)# 跨尺度特征融合fused_features = cross_scale_fusion(enhanced_features)return fused_features
2. 全流程聚合分发范式(FullPAD)
FullPAD通过三条独立隧道实现关联增强特征的精准定向分发:
隧道1:主干-颈部连接层
- 直接传递主干网络的深层特征
- 保持特征的原始语义信息
- 减少信息传递过程中的损失
隧道2:颈部网络内部各层级
- 实现层级间的深度耦合
- 增强特征表达能力
- 改善梯度传播效率
隧道3:颈部-检测头衔接层
- 优化最终检测特征
- 提升检测精度
- 减少false positive
3. 深度可分离卷积优化
设计目标:
- 在保持性能的同时显著降低参数量
- 减少计算复杂度,提升推理速度
- 优化内存使用效率
技术实现:
class DS_C3k2(nn.Module):def __init__(self, in_channels, out_channels, kernel_size=3):super().__init__()self.depthwise = nn.Conv2d(in_channels, in_channels, kernel_size, groups=in_channels)self.pointwise = nn.Conv2d(in_channels, out_channels, 1)self.activation = nn.ReLU()def forward(self, x):x = self.depthwise(x)x = self.pointwise(x)return self.activation(x)
性能表现与实验分析
MS COCO基准测试结果
| 模型 | mAP | 参数量 | FLOPs | 推理速度 |
|---|---|---|---|---|
| YOLOv11-N | 39.5% | 2.6M | 6.5G | 1.2ms |
| YOLOv12-N | 41.0% | 2.9M | 7.2G | 1.4ms |
| YOLOv13-N | 42.5% | 2.4M | 6.1G | 1.1ms |
性能提升分析
准确性提升:
- 相比YOLOv11-N提升mAP 3.0%
- 相比YOLOv12-N提升mAP 1.5%
- 在不同IoU阈值下均表现出色
效率优化:
- 参数量减少8%(相比YOLOv11-N)
- FLOPs降低6%,推理速度提升9%
- 内存占用减少15%
部署与应用
模型导出与转换
ONNX格式导出:
from ultralytics import YOLO# 加载预训练模型
model = YOLO('yolov13n.pt')# 导出为ONNX格式
model.export(format="onnx", half=True)# 支持多种尺度
for scale in ['n', 's', 'm', 'l', 'x']:model = YOLO(f'yolov13{scale}.pt')model.export(format="onnx", half=True)
推理部署方案
1. CPU + OpenVINO 2025异步流水线
import openvino as ov# 初始化OpenVINO运行时
core = ov.Core()
model = core.read_model("yolov13n.onnx")
compiled_model = core.compile_model(model, "CPU")# 创建异步推理队列
infer_queue = ov.AsyncInferQueue(compiled_model, 4)# 异步推理
def async_inference(image_batch):for image in image_batch:infer_queue.start_async(image)infer_queue.wait_all()return [req.get_output_tensor().data for req in infer_queue]
2. GPU + TensorRT 10.8
# 转换为TensorRT引擎
trtexec.exe --onnx=yolov13n.onnx \--saveEngine=yolov13n.engine \--fp16 \--workspace=4096
3. 移动端部署
# 使用ONNX Runtime Mobile
import onnxruntime as ort# 创建移动端优化会话
session = ort.InferenceSession("yolov13n.onnx", providers=['CPUExecutionProvider'])# 量化推理
def mobile_inference(image):input_tensor = preprocess(image)outputs = session.run(None, {'input': input_tensor})return postprocess(outputs)
技术细节深入分析
超图构建算法
YOLO13的超图构建过程采用了自适应邻接矩阵生成算法:
def build_adaptive_hypergraph(features, threshold=0.5):"""构建自适应超图结构"""B, C, H, W = features.shape# 特征向量化feature_vectors = features.view(B, C, -1).transpose(1, 2)# 计算特征相似度矩阵similarity_matrix = torch.matmul(feature_vectors, feature_vectors.transpose(1, 2))# 自适应阈值化adaptive_threshold = torch.quantile(similarity_matrix, threshold)adjacency_matrix = (similarity_matrix > adaptive_threshold).float()# 构建超边hyperedges = generate_hyperedges(adjacency_matrix)return hyperedges
梯度传播优化
FullPAD范式通过多路径梯度传播,有效缓解了深层网络的梯度消失问题:
class FullPADModule(nn.Module):def __init__(self, channels):super().__init__()self.tunnel1 = BackboneNeckTunnel(channels)self.tunnel2 = NeckInternalTunnel(channels)self.tunnel3 = NeckHeadTunnel(channels)self.fusion = AdaptiveFusion(channels * 3)def forward(self, backbone_feats, neck_feats):# 三条隧道并行处理t1_out = self.tunnel1(backbone_feats)t2_out = self.tunnel2(neck_feats)t3_out = self.tunnel3(neck_feats)# 自适应融合fused_features = self.fusion([t1_out, t2_out, t3_out])return fused_features
应用场景与未来展望
典型应用场景
1. 实时视频监控
- 高精度的多目标追踪
- 低延迟的实时检测
- 资源占用优化
2. 自动驾驶
- 多尺度目标检测
- 远距离小目标识别
- 恶劣天气条件适应
3. 工业质检
- 微小缺陷检测
- 批量产品检测
- 高精度要求场景
技术发展趋势
1. 模型轻量化
- 进一步压缩参数量
- 提升移动端部署性能
- 优化量化算法
2. 多模态融合
- 结合RGB-D信息
- 融合雷达数据
- 多传感器协同
3. 自适应学习
- 在线学习能力
- 域适应技术
- 少样本学习
总结
YOLO13通过引入超图关联增强机制和全流程聚合分发范式,实现了目标检测领域的重要突破。其创新的架构设计不仅提升了检测精度,还显著降低了计算复杂度,为实际应用提供了更优的解决方案。
随着深度学习技术的不断发展,YOLO13的技术创新为未来的目标检测研究提供了新的思路和方向。相信在不久的将来,基于超图理论的特征增强技术将在更多计算机视觉任务中发挥重要作用。
参考资料:
- 论文地址:https://arxiv.org/pdf/2506.17733
- 代码仓库:https://github.com/iMoonLab/yolov13
- 技术文档:https://docs.ultralytics.com/
作者简介:
专注于计算机视觉与深度学习技术研究,对目标检测、图像分割等领域有深入理解。