基于RK3588的KVM(Keyboard, Video, Mouse)远程传输方案
基于RK3588的KVM(Keyboard, Video, Mouse)远程传输方案,结合硬件编解码能力与虚拟化技术,可实现低延迟、高稳定性的远程设备控制,适用于工业控制、无人机操作等场景。核心方案设计如下:
🖥️ 一、硬件加速与编解码能力
- 视频处理:
- 内置NPU(6TOPS算力)支持H.265/VP9硬编解码,实现8K@60fps视频流畅压缩传输,带宽占用降低50%以上912。
- 支持多路视频输入(如6路MIPI CSI摄像头),通过画中画拼接或独立编码传输,适配多设备监控场景59。
- 低延迟优化:
- 端到端时延≤60ms(含相机采集、编码、网络传输),支持15ms级编解码延迟,满足实时操作需求19。
🌐 二、网络传输与协议优化
- 带宽自适应:
- 支持500Kbps~2Mbps窄带信道传输,动态调整码率保障画面流畅性19。
- 集成双千兆网口,支持WiFi6/5G多模冗余传输,避免单点故障813。
- 传输协议:
- 基于UDP自定义协议或SRT(Secure Reliable Transport),减少TCP重传延迟10。
- 支持视频中继转发,扩展控制距离(如无人机超视距操控)19。
⚙️ 三、虚拟化与系统架构
- KVM虚拟化:
- 通过Buildroot定制轻量级系统,集成QEMU 8.2.0优化虚拟设备支持(如Cortex-A55虚拟化)2。
- 支持多虚拟机隔离运行,独立分配视频流与控制通道28。
- 远程控制协议:
- 采用XRDP/VNC协议实现键鼠指令透传,结合GPU虚拟化加速远程桌面渲染313。
🏭 四、工业级可靠性设计
- 接口扩展:
- 支持PCIe 3.0×4扩展网卡/采集卡,兼容CameraLink、12G-SDI等工业相机接入411。
- 环境适应性:
- 宽温运行(-25℃~+70℃),金属外壳设计,通过EMC工业四级认证813。
🚀 五、典型应用场景
- 无人机实时操控:
- 1080p@60Hz视频通过5G回传,结合“人在回路”控制模式,实现30ms级指令响应19。
- 工业远程维护:
- 多路摄像头画面经RK3588编码后,通过KVM同步至控制中心,支持故障设备远程调试412。
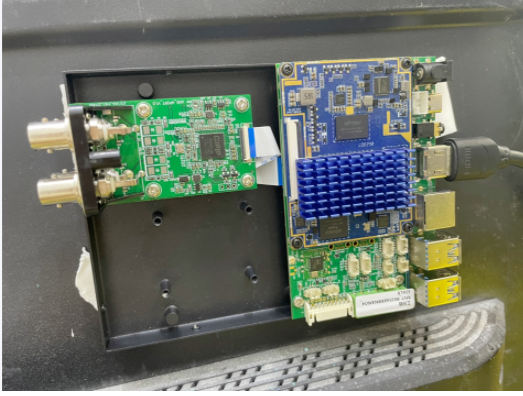
● KVM远程传输方案,HDMI/USB远程传输
● AVoIP-200-TX(发射端)
信号输入:1 x HDMI in,最高支持4K@30Hz
1 x USB2.0 type-B
信号输出:1 x GbE LAN, RJ45
电源输入:DC 9~36V
● AVoIP-200-RX(接收端)
信号输入:1 x GbE LAN, RJ45
信号输出:1 x HDMI out,最高支持4K@30Hz
4 x USB2.0 type-A
电源输入:DC 9~36V