PETR- Position Embedding Transformation for Multi-View 3D Object Detection
旷视 ECCV 2022
纯视觉BEV方案transformer网络3D检测
paper:[2203.05625] PETR: Position Embedding Transformation for Multi-View 3D Object Detection
code:GitHub - megvii-research/PETR: [ECCV2022] PETR: Position Embedding Transformation for Multi-View 3D Object Detection & [ICCV2023] PETRv2: A Unified Framework for 3D Perception from Multi-Camera Images
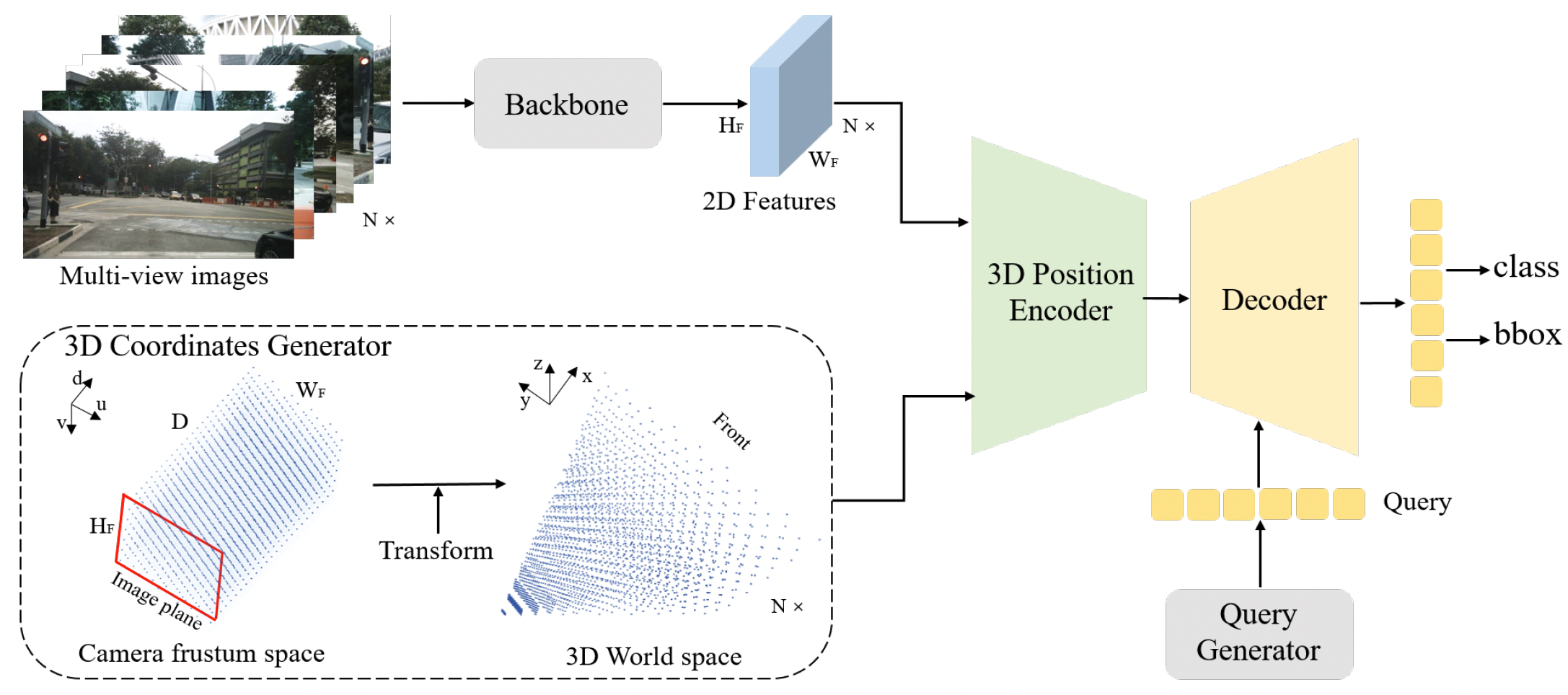
目标:环视相机的2D特征,加3D位置编码,转成3D表征
- 相机视椎空间离散化成栅格坐标点
- 坐标点用相机参数转到自车空间3D坐标
- 从相机抽特征,加上3D坐标,作为位置encoder输入,输出带3D位置的特征
- 上面特征输入transformer decoder,和object query交互,输出检测结果
和DETR3D区别

DETR3D:
Detr3DHead__init__self.query_embedding = nn.Embedding(self.num_query, self.embed_dims * 2)forwardquery_embeds = self.query_embedding.weighths, init_reference, inter_references = self.transformer(mlvl_feats,query_embeds,reg_branches=self.reg_branches if self.with_box_refine else None, # noqa:E501img_metas=img_metas,)Detr3DTransformer__init__self.embed_dims = self.decoder.embed_dimsself.reference_points = nn.Linear(self.embed_dims, 3)forward(self, mlvl_feats, query_embed, reg_branches=None, **kwargs):query_pos, query = torch.split(query_embed, self.embed_dims , dim=1)query_pos = query_pos.unsqueeze(0).expand(bs, -1, -1)reference_points = self.reference_points(query_pos).sigmoid()
PETR:
PETRHead__init__num_query=900self.embed_dims = 256self.reference_points = nn.Embedding(self.num_query, 3)nn.init.uniform_(self.reference_points.weight.data, 0, 1)self.query_embedding = nn.Sequential(nn.Linear(self.embed_dims*3//2, self.embed_dims),nn.ReLU(),nn.Linear(self.embed_dims, self.embed_dims),)forwardreference_points = self.reference_points.weightquery_embeds = self.query_embedding(pos2posemb3d(reference_points))reference_points = reference_points.unsqueeze(0).repeat(batch_size, 1, 1) #.sigmoid()outs_dec, _ = self.transformer(x, masks, query_embeds, pos_embed, self.reg_branches)PETRDNTransformer__init__forward(self, x, mask, query_embed, pos_embed, attn_masks=None, reg_branch=None)query_embed = query_embed.transpose(0, 1) # [num_query, dim] -> [num_query, bs, dim]out_dec = self.decoder(query=target,key=memory,value=memory,key_pos=pos_embed,query_pos=query_embed,key_padding_mask=mask,attn_masks=[attn_masks, None],reg_branch=reg_branch,)组成
- 生成3D坐标
- 输入:栅格坐标点
 各相机外参
各相机外参
- 用CaDDN的LID采样空间
- 输出:3D坐标点

- 过程:
- 计算3D坐标点
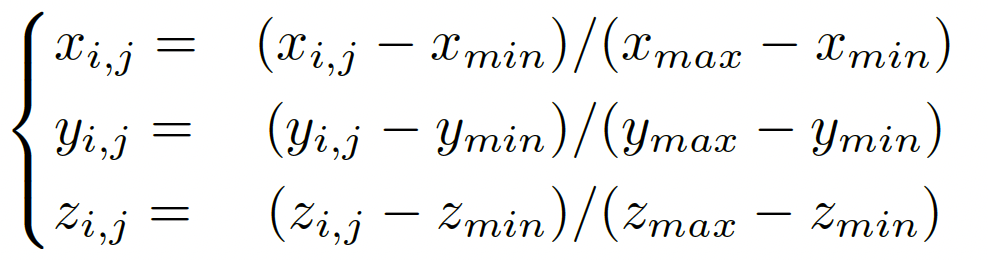
- min-max正则化
- 计算3D坐标点
- 输入:栅格坐标点
- 3D位置encoder
- 输入:2D特征
 ,3D坐标点
,3D坐标点
- 输出:3D特征
- 过程:
- 3D坐标点输入MLP编码,输出3D位置embedding
- 2D特征输入1*1卷积,和3D位置embedding相加,得到3D特征
- 提特征:ResNet、SwinTR、VoVNetV2
- flatten 3D特征
- 输入:2D特征
- object query
- 输入:参考点 nn.Embedding(self.num_query, 3) PETRHead.reference_points
- 输出:object query Q0 query_embeds
- 过程:正态分布初始化,余弦位置编码(pos2posemb3d),MLP(PETRHead.query_embedding)
- decoder
- 包含mha,ffn,训练中object query提取出障碍物高维特征
- head,loss函数
- 分类头:出障碍物类别,focal loss
- 框头:输出相对于参考点的偏移量,L1 loss
- Hungarian匹配gt
 ,和DETR3D一样
,和DETR3D一样