基于51单片机的步进电机控制系统—正/反转、加/减速
基于51单片机的步进电机控制
(仿真+程序+原理图)
功能介绍
具体功能:
1.由ULN2003A驱动步进电机;
2.LCD12864显示状态;
3.按键控制功能有正/反转、加/减速、停止;
演示视频:
基于51单片机的步进电机控制系统—正/反转、加/减速
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
程序
/************************************************************
*实例名称:步进电机
*实例说明:实现步进电机的正反转以及加减速控制,并在LCD屏上实时显示步进电机的状态/***微信公众号:木子单片机****
************************************************************/
#include "target.h"
#include "key.h"/**************调节MOTER_SPEED_NORMAL 5的大小就可改变速度********/#define MOTER_SPEED_NORMAL 5 //电机正常运行上限
#define MOTER_SPEED_MIN 25 //电机低速运行下限
uchar timer0Count; //timer0中断溢出计数
uchar moterStep; //电机步数 (0x00~0x07)
uint moterSpeed; //速度值变化量 (0~moterSpeedMax)
uint moterSpeedMax; //速度最快值
uchar moterState; //电机运行状态
uchar moterDirect; //电机运转方向,静止/0x00;正转/0x01;反转/0x02
uchar moterAddReduce; //电机加速及减速量
uchar speedDirect; //0x01,电机加速;0x02,电机减速
bit display_is_ok; //显示屏是否需要更新
/**********************************************************
MOTER_STOP,停止;MOTER_FRONT_ADD,正转加速
MOTER_FRONT_REDUCE,正转减速;MOTER_FRONT_NORMAL,正转正常
MOTER_FRONT_LOWER,正转低速;MOTER_QUEEN_ADD,反转加速
MOTER_QUEEN_REDUCE,反转减速,MOTER_QUEEN_NOMAL,反转正常
MOTER_QUEEN_LOWER,反转低速
***********************************************************/
void main()
{uchar keyValueRead;target_init();moterState=MOTER_STOP;timer0Count=0x00;moterAddReduce=0x00;moterStep=0x00;moterSpeed=0x00; moterSpeedMax=0x00; //默认停止moterDirect=0x00; //默认停止moter_state_display(MOTER_STOP);display_is_ok=1;sei();while(1){keyValueRead=get_key_value();switch(keyValueRead){case KEY_FRONT: //正转{moterState=MOTER_FRONT_LOWER;moterDirect=0x01;moterSpeedMax=MOTER_SPEED_MIN;display_is_ok=0;//moter_state_display(MOTER_FRONT_LOWER);break; }case KEY_QUEEN: //反转{moterState=MOTER_QUEEN_LOWER;moterDirect=0x02;moterSpeedMax=MOTER_SPEED_MIN;display_is_ok=0;//moter_state_display(MOTER_QUEEN_LOWER);break;}case KEY_ADD: //加速{speedDirect=0x01;***//完整资料**//***微信公众号:木子单片机**** /**************调节moterAddReduce=10的大小就可改变速度********/moterAddReduce=5;display_is_ok=0;if(moterDirect==0x01) //正转moter_state_display(MOTER_FRONT_ADD);else if(moterDirect==0x02)moter_state_display(MOTER_QUEEN_ADD);break;}case KEY_REDUCE: //减速{speedDirect=0x02;moterAddReduce=100;display_is_ok=0;if(moterDirect==0x01) //正转moter_state_display(MOTER_FRONT_REDUCE);else if(moterDirect==0x02)moter_state_display(MOTER_QUEEN_REDUCE);break;}case KEY_STOP: //停止{moterState=MOTER_STOP;moterSpeedMax=0x00; //默认停止moterDirect=0x00; //默认停止moter_state_display(MOTER_STOP);display_is_ok=1;break;}default:break;}if(display_is_ok==0) //判断LCD内容是否需要更新{switch(moterSpeedMax){case MOTER_SPEED_NORMAL:{if(moterDirect==0x01)moter_state_display(MOTER_FRONT_NORMAL);else if(moterDirect==0x02)moter_state_display(MOTER_QUEEN_NOMAL);display_is_ok=1;break;}case MOTER_SPEED_MIN:{if(moterDirect==0x01)moter_state_display(MOTER_FRONT_LOWER);else if(moterDirect==0x02)moter_state_display(MOTER_QUEEN_LOWER);display_is_ok=1;break;}default:break;}}}
}
void timer0_overflow(void) interrupt 1 //timer0定时10ms
{TH0=0xEE; //定时10msTL0=0x00;if(timer0Count<moterAddReduce) //是否中断100次,moterAddReduce在加速减速处赋值timer0Count++;else{timer0Count=0x00;if(speedDirect==0x01) //如果为加速{if(moterSpeedMax>MOTER_SPEED_NORMAL)moterSpeedMax--; //最大加速到正常值else{moterAddReduce=0x00;speedDirect=0x00; //已经加速到正常值,不再加速}}else if(speedDirect==0x02){if(moterSpeedMax<MOTER_SPEED_MIN)moterSpeedMax++;else{moterAddReduce=0x00;speedDirect=0x00;}}}if(moterSpeed<moterSpeedMax)moterSpeed++;else{moterSpeed=0x00;if(moterDirect==0x01) //正转{if(moterStep>0x00)moterStep--;elsemoterStep=0x07;}else if(moterDirect==0x02) //反转{if(moterStep<0x07)moterStep++;elsemoterStep=0x00;}ground(moterStep);}}硬件设计
使用元器件:
单片机:STC89C52;
(注意:单片机是通用的,无论51还是52、无论stc还是at都一样,引脚功能都一样。程序也是一样的。)
液晶显示屏:LCD12864;
步进电机;晶振:12M;
排阻:10K;电位器:10K;
电机驱动芯片:ULN2003A;
电容:33P;按键;
导线:若干;
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
设计资料
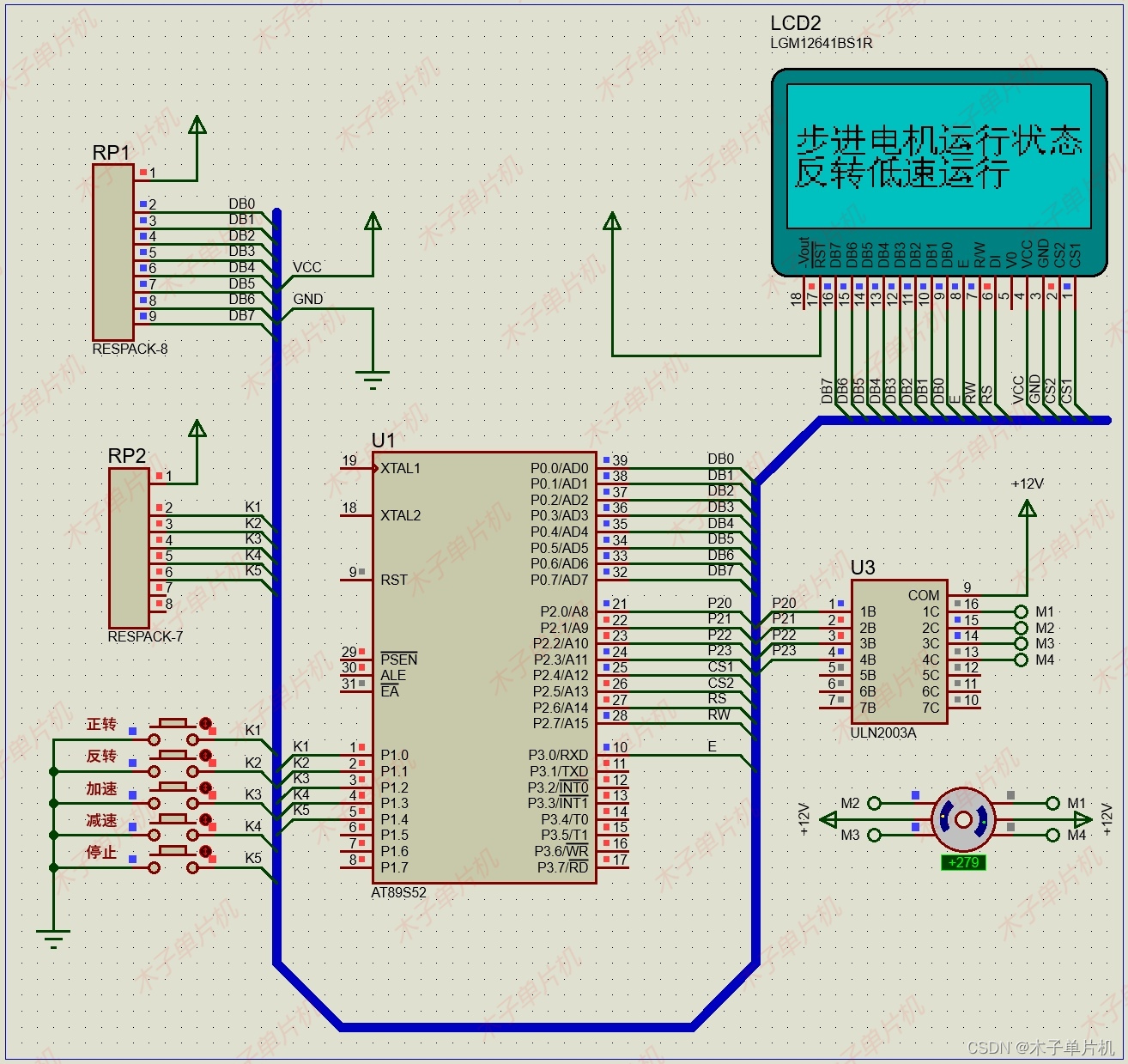
01仿真图
本设计使用Proteus7.8和Proteus8.9两个版本设计!具体如图!
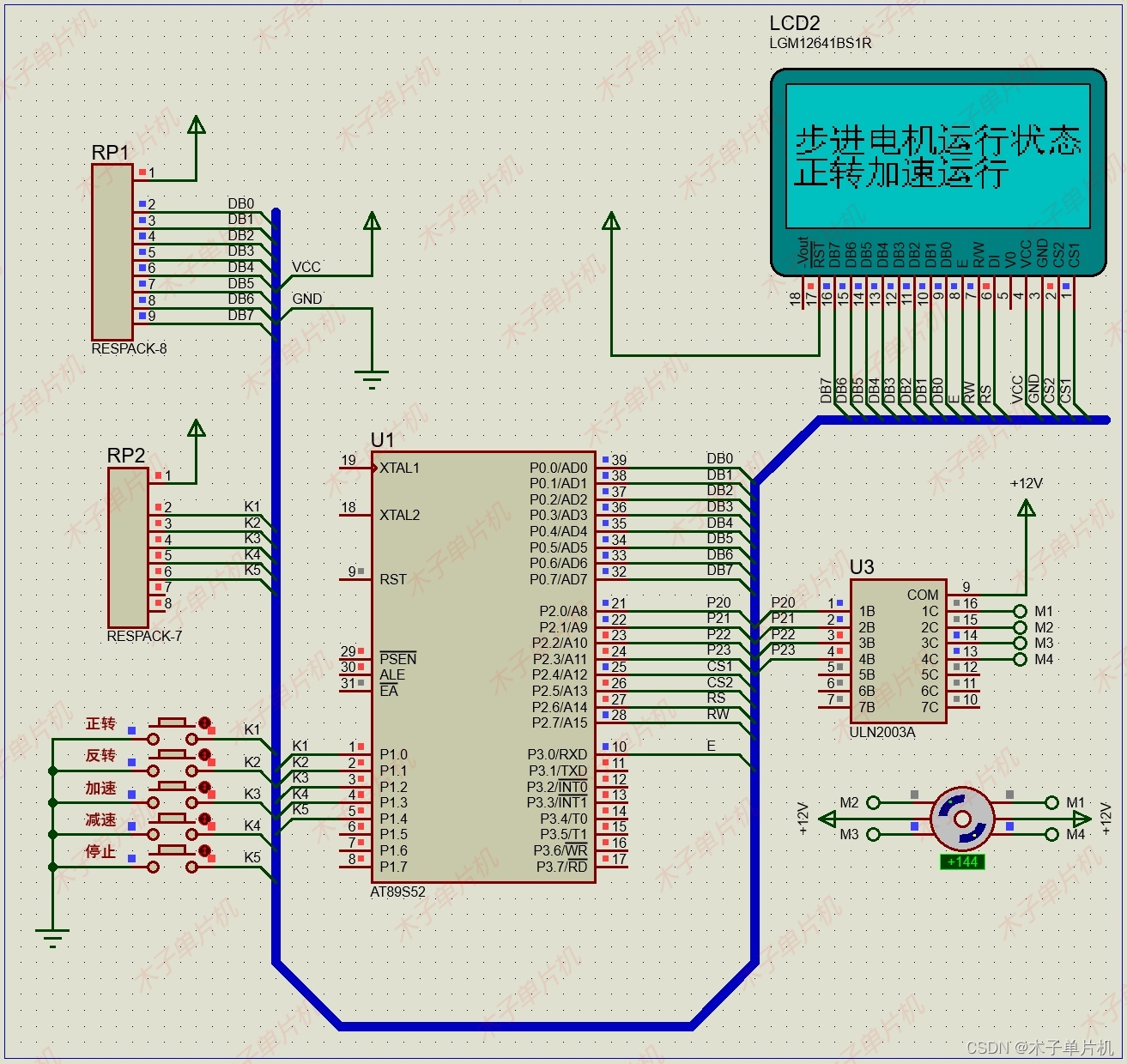 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
02原理图
本系统原理图采用Altium Designer19设计,具体如图!
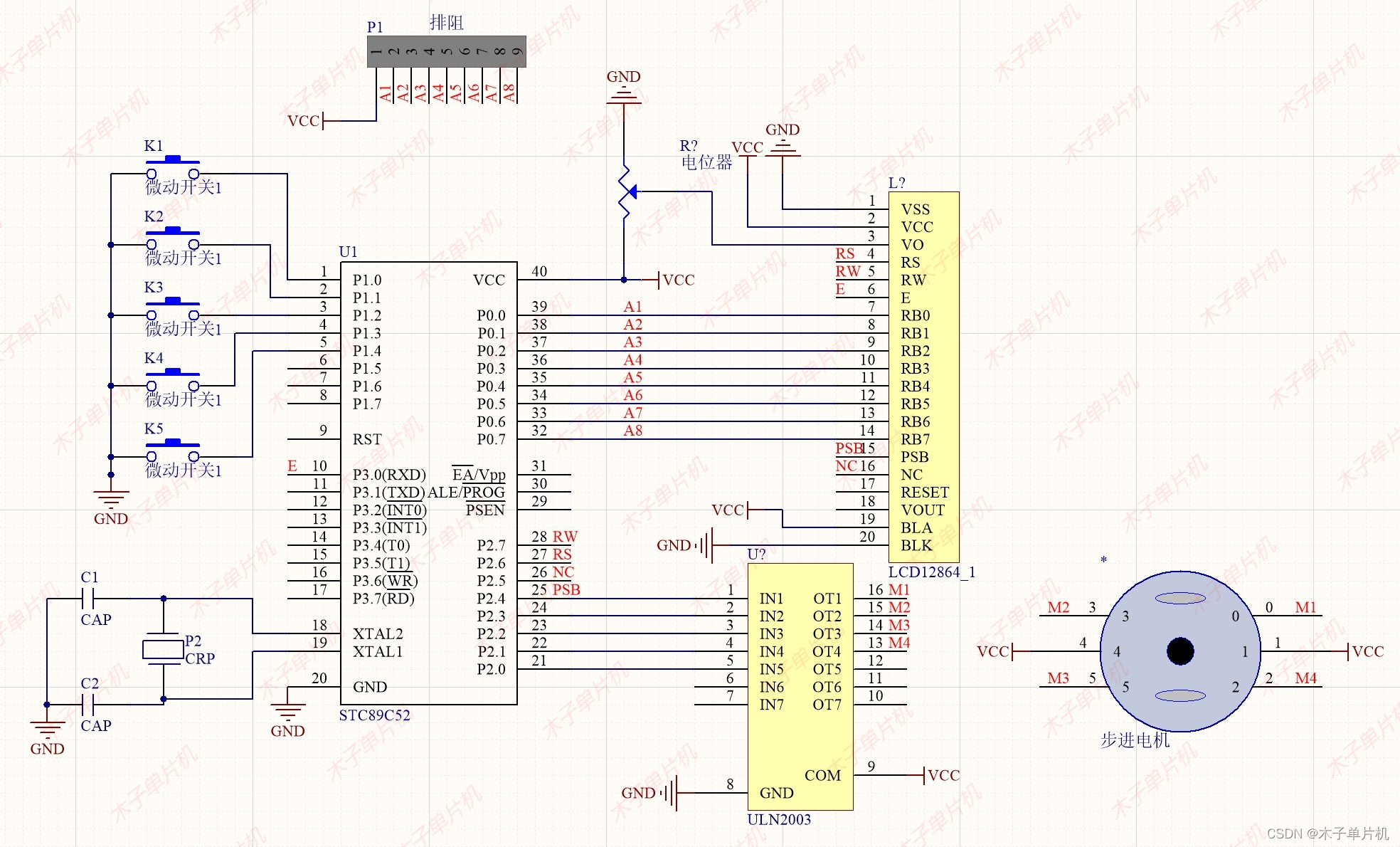 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
03程序
本设计使用Keil5版本编程设计!具体如图!
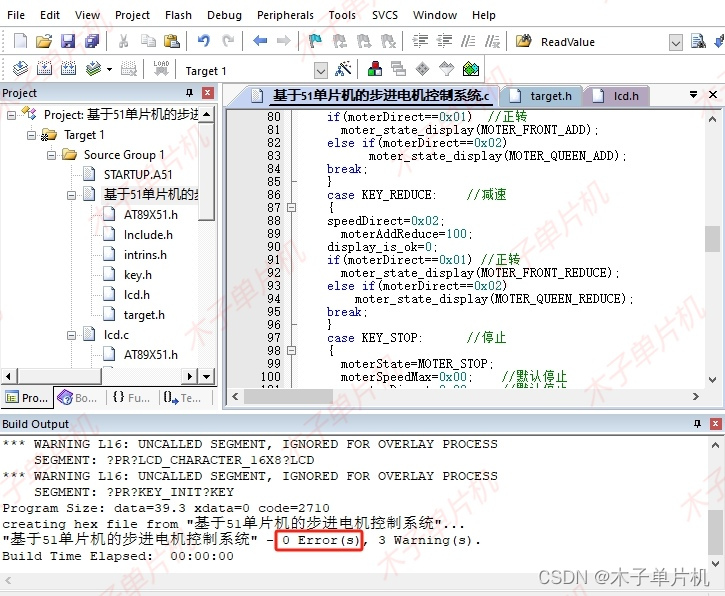 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
04设计资料
资料获取请看前面演示视频,全部资料包括仿真源文件 、AD原理图、程序(含注释)、元件清单等。具体内容如下,全网最全! !

操作演示请观看前面演示视频!
点赞分享一起学习成长。