2023年IEEE IOTJ SCI1区TOP,动态环境下无人机目标覆盖任务路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.问题模型
- 3.算法设计
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流

1.摘要
无人机(UAV)作为物联网应用的重要工具,正广泛应用于智能农业监测、智能交通监测等领域,并逐渐成为国内外研究热点。然而,现有飞行路径规划算法在可行性与有效性方面仍存在不足。本文针对动态环境下无人机目标覆盖任务路径规划问题,提出了一种基于贪心分配与改进蚁群优化算法(ACO-VP),该算法首先通过贪心策略确定最优无人机数量并合理分配目标点;随后在蚁群算法中引入可变信息素增强因子和挥发系数,优化信息素更新机制以提升规划效率;并在目标点动态增加时实现路径的实时重规划。仿真结果表明,该方法在覆盖效率与路径优化效果方面均优于传统算法。
2.问题模型
环境描述
本文设定的应用场景为森林火灾监测,区域内若干目标点被标记为易发火位置,为实现实时
监测与异常检查,多架无人机被调度执行覆盖任务。目标点集合记为P=\mathcal{P}=P=
{P1,P2,…,PN}\{P_1,P_2,\ldots,P_N\}{P1,P2,…,PN},无人机集合记为U={U1,U2,…,UM}\mathcal{U}=\{U_1,U_2,\ldots,U_M\}U={U1,U2,…,UM}。无人机需从基站出发并
返回,覆盖区域内所有目标点,且每个点仅能被一架无人机访问一次。
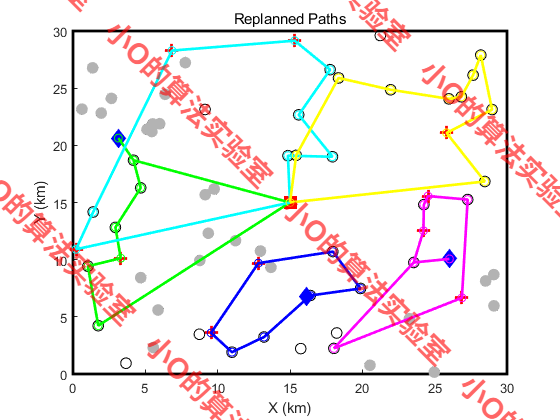
在任务执行过程中,若出现新的目标点,则需将其纳入覆盖范围,路径规划需实时更新。此时,无人机需从当前位置重新规划航迹,覆盖剩余目标点并最终返回基站。
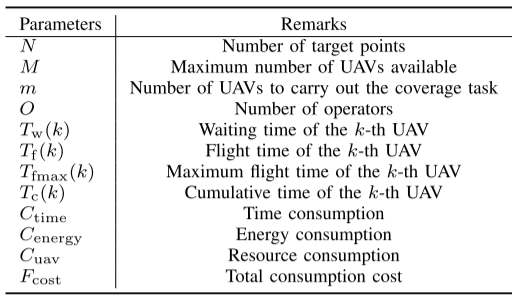
成本函数
为优化多无人机覆盖任务的飞行轨迹,本文构建了综合成本函数。将无人机起飞前的准备时间定义为等待时间Tw(k)T_w(k)Tw(k),其与操作员数量相关,并随无人机顺序累积。飞行时间Tf(k)T_f(k)Tf(k) 表示无人机完成所有目标点访问及返回基站所需时间,由飞行距离与转角时间共同决定。累计时间Tc(k)T_c(k)Tc(k) 定义为等待时间与飞行时间之和。
约束条件包括:无人机飞行时间不得超过电池续航限制;每个目标点必须且只能由一架无人机访问;路径需保证连通性;无人机数量不得超过上限。
综合成本函数:
Fcost=w1Ctime+w2Cenergy+w3CuavF_\mathrm{cost}=w_1C_\mathrm{time}+w_2C_\mathrm{energy}+w_3C_\mathrm{uav} Fcost=w1Ctime+w2Cenergy+w3Cuav
3.算法设计
算法分为两个阶段:任务分配和路径规划。在第一阶段,采用贪心分配策略确定任务所需的无人机数量,并将目标点分配给各无人机;在第二阶段,提出基于可变信息素蚁群优化算法(ACO-VP),为选定的无人机规划最优路径。
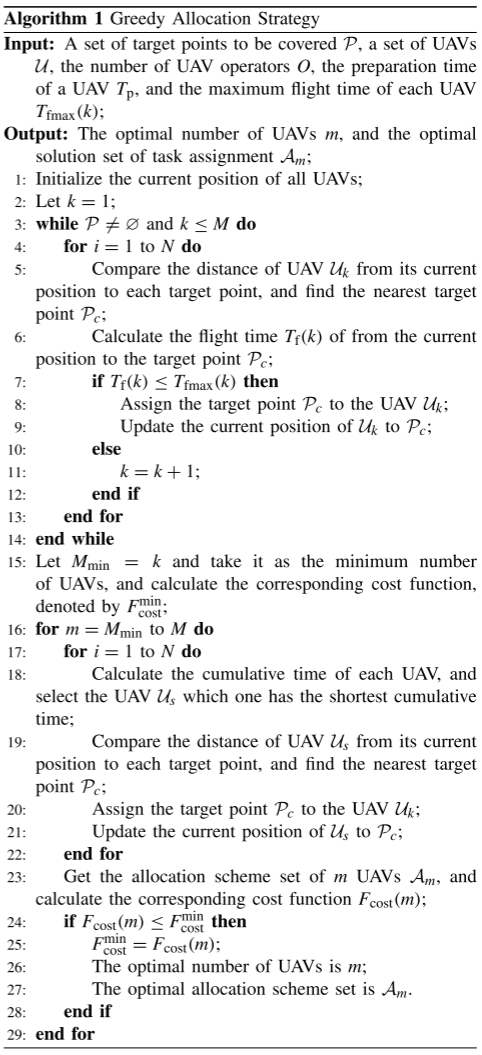
贪心分配策略
在每一步迭代中,将飞行时间最短的目标点分配给当前累计时间最小的无人机,并更新其路径与状态,直至所有目标点分配完毕。
首先计算完成任务所需的最小无人机数MminM_\mathrm{min}Mmin,并得到其对应的基准成本值。随后,对从MminM_\mathrm{min}Mmin到最大无人机数MMM的不同情况逐一采用贪心策略,生成任务分配方案,并计算相应的综合成本函数Fcost(m)F_{\mathrm{cost}}(m)Fcost(m)。通过比较不同mmm的结果,最终确定最优无人机数量及其最优任务分配方案。
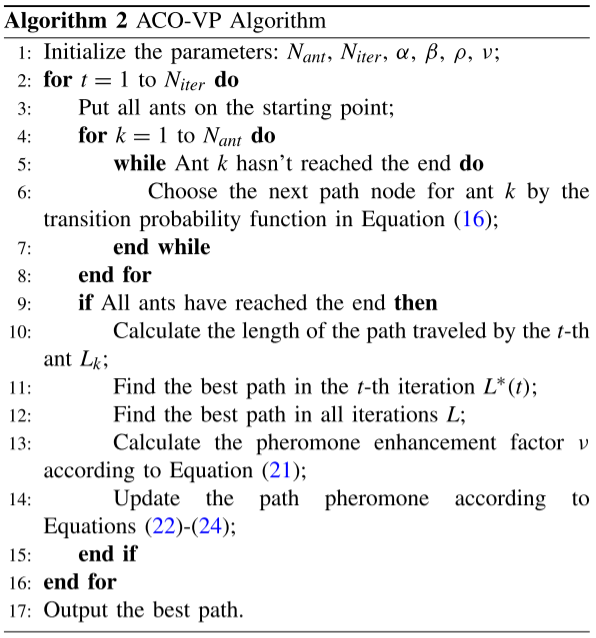
可变信息素蚁群优化算法(ACO-VP)
为提高搜索效率和收敛速度,本文提出了一种基于可变信息素改进蚁群算法(ACO-VP),该方法通过在信息素更新规则中引入可变信息素增强因子和可变信息素挥发系数。
在信息素增量模型中,引入可变信息素增强因子ν\nuν,用于增强第ttt次迭代中的信息素浓度。当本次迭代的最优解优于上一迭代的最优解时,在对应路径上增加额外信息素,以加快正反馈讨程中的信息素沉积:
ν(t)={QL∗(t),if L∗(t)<L0,otherwise\nu(t) = \begin{cases} \dfrac{Q}{L^*(t)}, & \text{if } L^*(t) < L \\ 0, & \text{otherwise} \end{cases} ν(t)=⎩⎨⎧L∗(t)Q,0,if L∗(t)<Lotherwise
信息素更新:
τij(t+1)=(1−ρ)τij(t)+ρ[Δτij(t)+ν(t)]\tau_{ij}(t+1)=(1-\rho)\tau_{ij}(t)+\rho[\Delta\tau_{ij}(t)+\nu(t)] τij(t+1)=(1−ρ)τij(t)+ρ[Δτij(t)+ν(t)]
信息素挥发系数ρ\rhoρ对算法收敛速率影响显著。当ρ\rhoρ过小,残余信息素难以挥发,收敛速度显著降低;当ρ\rhoρ过大,收敛虽加快,但易陷入局部最优。因此,引入可变挥发系数ρ\rhoρ:
ρ(t+1)={1−0.9(1−ρ(t)),if δ<0.001ρ(t),otherwise\rho(t+1) = \begin{cases} 1 - 0.9\bigl(1 - \rho(t)\bigr), & \text{if } \delta < 0.001 \\ \rho(t), & \text{otherwise} \end{cases} ρ(t+1)={1−0.9(1−ρ(t)),ρ(t),if δ<0.001otherwise
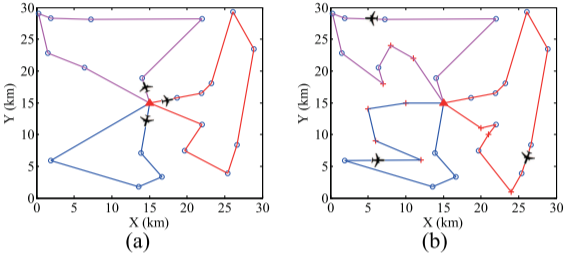
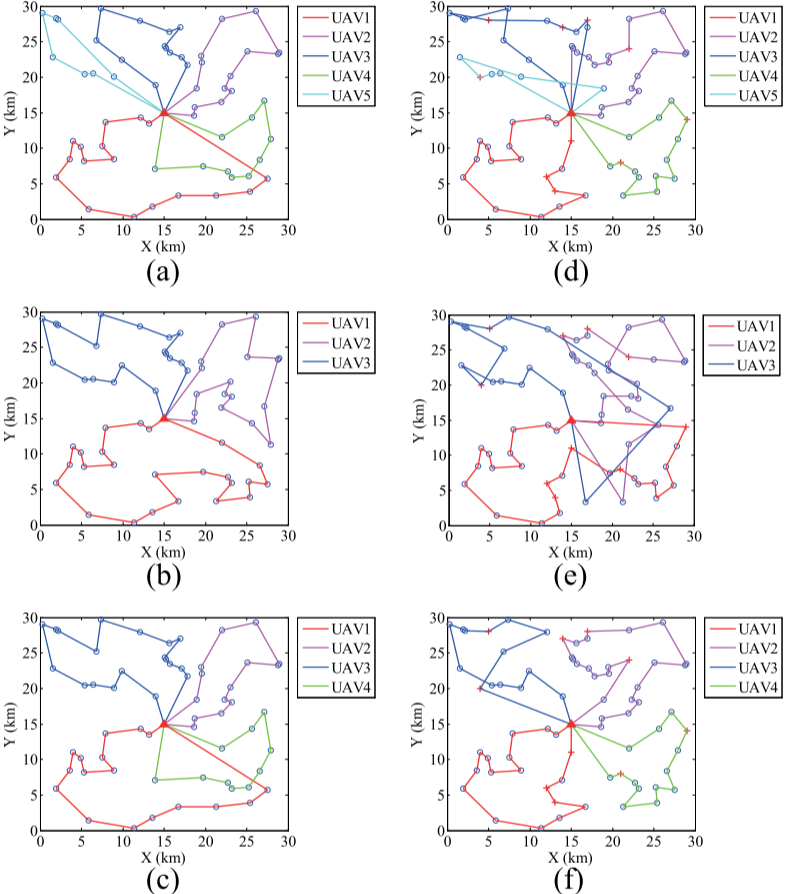
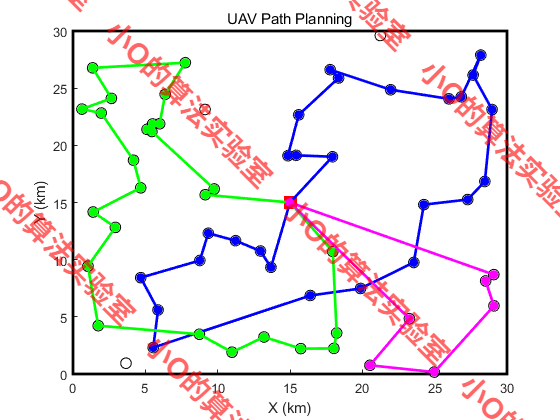
4.结果展示
5.参考文献
[1] Li J, Xiong Y, She J. UAV path planning for target coverage task in dynamic environment[J]. IEEE Internet of Things Journal, 2023, 10(20): 17734-17745.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx