ESP32步进电机控制实战:从原理到代码实现
步进电机:精确控制的理想选择
步进电机是一种将电脉冲信号转换为角位移的执行机构,其最大特点是能够精确控制旋转角度和速度,非常适合需要精确定位的应用场景。与普通直流电机相比,步进电机无需编码器即可实现开环精确控制,在3D打印、机器人、自动化设备中有着广泛应用。
步进电机工作原理
基本结构
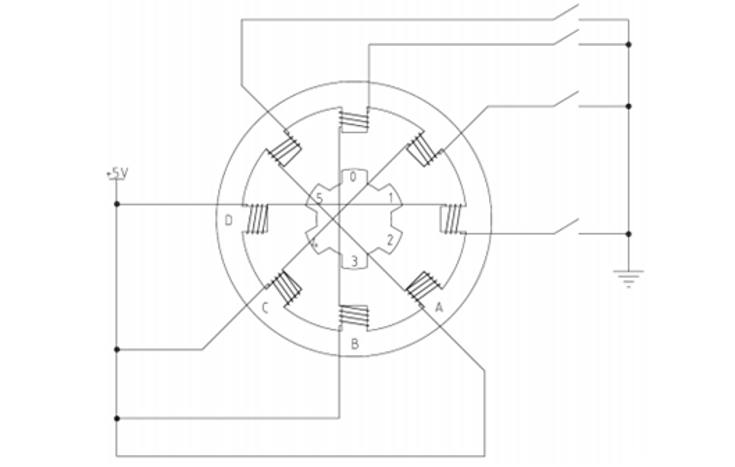
步进电机主要由定子和转子组成,定子上绕有多个线圈(称为相),通过按特定顺序给线圈通电,产生旋转磁场驱动转子转动。

工作方式
步进电机通过改变定子线圈的通电顺序实现转动,常见工作模式有:
- 单四拍模式:线圈按A→B→C→D顺序通电,每步转动11.25°,一圈需32步
- 双四拍模式:线圈按AB→BC→CD→DA顺序通电,每步转动11.25°,扭矩比单拍大
- 八拍模式:线圈按A→AB→B→BC→C→CD→D→DA顺序通电,每步转动5.625°,精度更高
驱动电路设计
ULN2003驱动芯片
由于ESP32 GPIO引脚输出电流较小,无法直接驱动步进电机,需使用驱动芯片ULN2003:
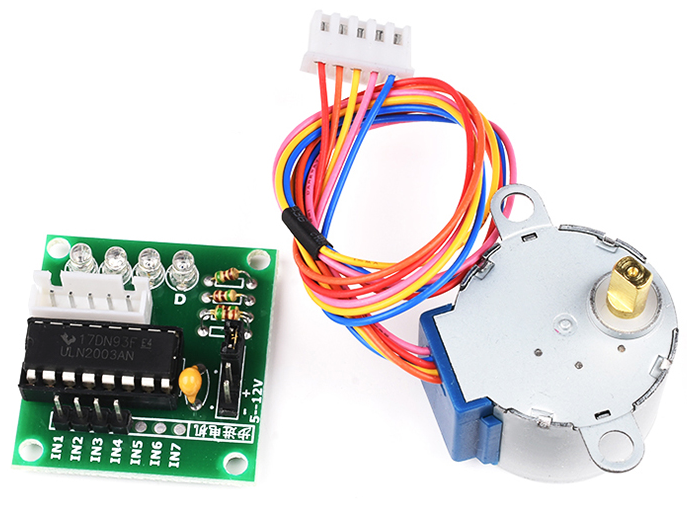
ULN2003是一款高电压大电流达林顿晶体管阵列,具有以下特点:
- 7路反向器输出,每路最大输出电流500mA
- 内置续流二极管,适合驱动感性负载
- 输入兼容TTL/CMOS电平,可直接与ESP32连接
电路连接
步进电机、ULN2003与ESP32的连接方式如下:
| ESP32 GPIO | ULN2003输入 | 电机线圈 |
|---|---|---|
| GPIO15 | IN1 | A相 |
| GPIO2 | IN2 | B相 |
| GPIO4 | IN3 | C相 |
| GPIO16 | IN4 | D相 |
注意:ULN2003需外接5V电源,电机电源与控制板电源共地。
ESP32控制代码实现
单四拍模式控制代码
from machine import Pin
import time# 初始化控制引脚
IN1 = Pin(15, Pin.OUT)
IN2 = Pin(2, Pin.OUT)
IN3 = Pin(4, Pin.OUT)
IN4 = Pin(16, Pin.OUT)# 定义单四拍相序
STEP_SEQUENCE = [[1, 0, 0, 0], # A相[0, 1, 0, 0], # B相[0, 0, 1, 0], # C相[0, 0, 0, 1] # D相
]# 初始化所有引脚为低电平
def reset_pins():IN1.value(0)IN2.value(0)IN3.value(0)IN4.value(0)reset_pins()
delay_time = 2 # 延迟时间(ms),控制转速while True:# 按顺序给各相通电for step in STEP_SEQUENCE:IN1.value(step[0])IN2.value(step[1])IN3.value(step[2])IN4.value(step[3])time.sleep_ms(delay_time)
代码解析
- 引脚初始化:将4个GPIO引脚配置为输出模式,分别连接ULN2003的IN1-IN4
- 相序定义:STEP_SEQUENCE数组定义了单四拍模式的通电顺序
- 循环控制:通过遍历相序数组,依次给各相线圈通电,实现电机连续转动
- 转速调节:修改delay_time值可改变电机转速,值越小转速越快
项目扩展建议
-
精确角度控制:
# 转动指定角度(单四拍模式) def rotate_degrees(degrees):steps = int(degrees / 11.25) # 计算所需步数for _ in range(steps):for step in STEP_SEQUENCE:# 设置引脚状态time.sleep_ms(delay_time) -
方向控制:通过反转相序数组实现正反转
# 反转相序实现逆时针转动 for step in reversed(STEP_SEQUENCE):# 设置引脚状态 -
速度控制:实现加减速功能,避免启动时电流过大
获取完整教程
本项目的详细实现步骤和代码优化技巧可以参考官方教程:ESP32步进电机控制详解