CS144 Lab3 实战记录:TCP 发送器实现
文章目录
- 1 实验背景与目标
- 2 TCP发送器的实现
- 2.1 整体流程
- 2.2 核心组件
- 2.3 窗口管理
- 2.4 关键函数实现
- 2.4.1 push函数
- 2.4.2 receive函数
- 2.4.3 tick函数
- 3 仓库地址
1 实验背景与目标
在 TCP 协议中,发送器(TCP Sender)是实现可靠传输的核心组件。它的主要职责是将应用层的字节流分割为 TCP 段,通过不可靠的网络传输,并确保数据被可靠接收。在 Stanford CS144 Lab3 中,我们需要基于 Lab0 实现的字节流(ByteStream)、Lab1 的字节流重组()、 Lab2 实现的接收器(TCPReceiver),完成 TCP 发送器的实现。TCP发送端的主要职责包括:
- 维护发送窗口和序列号
- 实现数据分段和传输
- 处理重传定时器
- 响应接收方的确认和流量控制
2 TCP发送器的实现
2.1 整体流程
其工作流程可以概括为:应用层数据通过push接口进入发送器,发送器根据当前窗口状态封装 TCP 段并发送,同时启动重传定时器;接收到 ACK 时更新确认状态和窗口信息,定时器超时则触发重传。这一过程通过push、receive、tick三个核心函数的协同,实现了数据发送、确认处理和超时重传的闭环控制。
2.2 核心组件
-
连接状态标志
-
syn_sent_:表示 SYN 握手包是否已发送。作为三次握手的起点,SYN 段占用 1 字节序列号,必须在数据传输前发送 -
fin_sent_:标记 FIN 结束包的发送状态。当字节流读取完毕时,发送 FIN 段表示数据传输完毕,同样占用 1 字节序列号
-
-
序列号管理
-
isn_(初始序列号):每个连接随机生成的初始序列号,用于防止历史连接的重复数据干扰 -
next_seqno_:下一个待发送的字节序列号,初始为 0,每次发送段后递增段的总长度(包括 SYN/FIN 标志占用) -
ackno_:接收端已确认的最高字节序列号,通过 ACK 解析得到,用于标记已可靠传输的边界 -
bytes_in_flight_:当前已发送但未确认的字节总数,实时反映窗口的占用情况
-
-
窗口与定时器状态
-
window_size_:接收端通告的可用窗口大小,初始化为 1(允许窗口探测),0 表示接收缓冲区已满 -
initial_RTO_ms_:初始重传超时时间,实验中通常设为 100ms,作为定时器的基准参数 -
current_RTO_ms_:动态调整的当前超时时间,每次重传后按指数退避算法加倍(如 200ms、400ms…) -
timer_:记录自上次定时器重置后的 elapsed 时间,用于判断是否超时 -
timer_running_:标记定时器是否处于运行状态,避免重复启动 -
consecutive_retransmissions_:连续重传次数,用于拥塞控制中的阈值调整(实验中暂未实现完整拥塞控制)
-
#pragma once#include "byte_stream.hh"
#include "tcp_receiver_message.hh"
#include "tcp_sender_message.hh"#include <functional>
#include <queue>class TCPSender
{
public:/* Construct TCP sender with given default Retransmission Timeout and possible ISN */TCPSender( ByteStream&& input, Wrap32 isn, uint64_t initial_RTO_ms ) : input_( std::move( input ) ), isn_( isn ), initial_RTO_ms_( initial_RTO_ms ), current_RTO_ms_( initial_RTO_ms ){}/* Generate an empty TCPSenderMessage */TCPSenderMessage make_empty_message() const;/* Receive and process a TCPReceiverMessage from the peer's receiver */void receive( const TCPReceiverMessage& msg );/* Type of the `transmit` function that the push and tick methods can use to send messages */using TransmitFunction = std::function<void( const TCPSenderMessage& )>;/* Push bytes from the outbound stream */void push( const TransmitFunction& transmit );/* Time has passed by the given # of milliseconds since the last time the tick() method was called */void tick( uint64_t ms_since_last_tick, const TransmitFunction& transmit );// Accessorsuint64_t sequence_numbers_in_flight() const; // For testing: how many sequence numbers are outstanding?uint64_t consecutive_retransmissions() const; // For testing: how many consecutive retransmissions have happened?const Writer& writer() const { return input_.writer(); }const Reader& reader() const { return input_.reader(); }Writer& writer() { return input_.writer(); }private:Reader& reader() { return input_.reader(); }ByteStream input_; // the outbound stream used to read data to sendWrap32 isn_; // initial Sequence Number/* State flag */bool syn_sent_{}; // has the SYN flag been sent?bool fin_sent_{}; // has the FIN flag been sent?/* Window management */uint16_t window_size_{ 1 }; // size of the receiver's windowuint64_t next_seqno_{}; // next sequence number to be sentuint64_t ackno_{}; // acknowledgment number of the receiveruint64_t bytes_in_flight_{}; // number of bytes sent but not acknowledged/* Retransmission timer management */uint64_t initial_RTO_ms_; // initial RTO in millisecondsuint64_t current_RTO_ms_{}; // current RTO in milliseconds uint64_t timer_{}; // timer for retransmissionbool timer_running_{}; // is the timer running?uint64_t consecutive_retransmissions_{}; // number of consecutive retransmissions// outstanding segments waiting for acknowledgmentstd::queue<TCPSenderMessage> outstanding_messages_{};
};
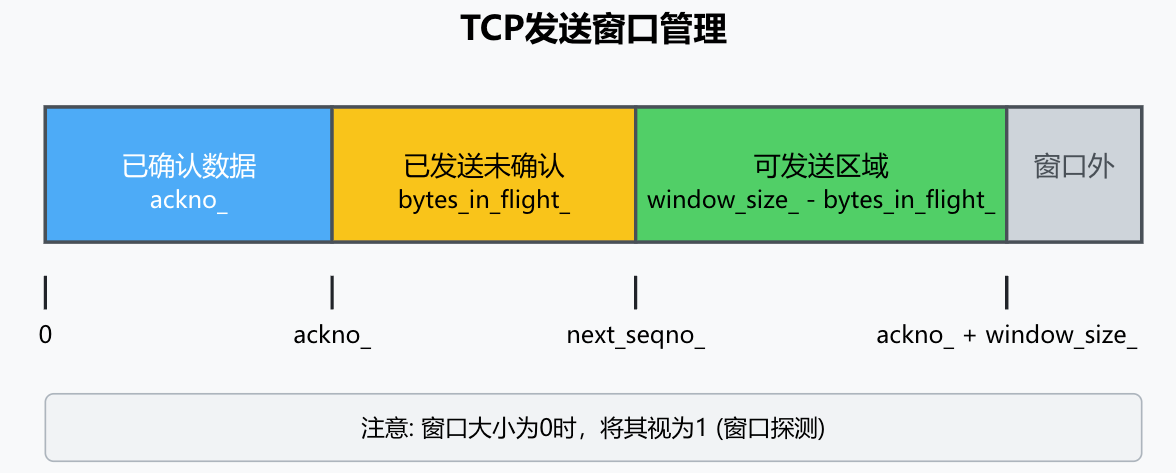
2.3 窗口管理
接收端通过 ACK 中的窗口字段告知发送端可用接收缓冲区大小,发送器必须严格遵循这一限制。这里需要处理两种特殊情况:
- 零窗口处理:当
window_size_为 0 时,视为接收缓冲区已满,发送器应停止发送数据(除了窗口探测段)。实验中采用 “窗口探测” 机制,将零窗口视为有效窗口为 1,允许发送 1 字节的段来探测窗口是否更新 - 有效窗口计算:实际可用窗口需考虑已发送未确认的字节(
bytes_in_flight_),公式为:
有效窗口 = max(1, window_size_) - bytes_in_flight_
这里的max(1, window_size_)确保零窗口时仍允许探测,而减去已发送字节则保证不超过接收端的处理能力
2.4 关键函数实现
2.4.1 push函数
push函数是TCP发送端的核心功能,负责将输入流中的数据封装成TCP报文并发送。其核心逻辑如下图所示:
void TCPSender::push(const TransmitFunction& transmit)
{// 计算有效窗口大小(将0窗口视为1进行窗口探测)const uint16_t effective_window = window_size_ ? window_size_ : 1;// 持续发送直到窗口用尽或FIN已发送while (bytes_in_flight_ < effective_window && !fin_sent_) {TCPSenderMessage msg = make_empty_message();// 如果连接未初始化,设置SYN标志if (!syn_sent_) {msg.SYN = true;syn_sent_ = true;}// 计算考虑窗口和已发送数据后的可用负载空间const uint64_t remaining_capacity = effective_window - bytes_in_flight_;const size_t max_payload = min(remaining_capacity - msg.sequence_length(), // 考虑SYN/FIN占用TCPConfig::MAX_PAYLOAD_SIZE);// 从输入流填充负载,不超过计算出的最大容量while (reader().bytes_buffered() && msg.payload.size() < max_payload) {const string_view data = reader().peek().substr(0, max_payload - msg.payload.size());msg.payload += data;reader().pop(data.size());}// 如果流已结束且窗口允许,设置FIN标志if (!fin_sent_ && reader().is_finished() && (remaining_capacity > msg.sequence_length())) {msg.FIN = true;fin_sent_ = true;}// 跳过空段(除了SYN/FIN外)if (msg.sequence_length() == 0)break;// 传输段并更新跟踪状态transmit(msg);next_seqno_ += msg.sequence_length();bytes_in_flight_ += msg.sequence_length();outstanding_messages_.push(move(msg));// 如果定时器未运行,启动重传定时器if (!timer_running_) {timer_running_ = true;timer_ = 0;}}
}
2.4.2 receive函数
receive函数处理从TCP接收方返回的确认信息,更新窗口大小和确认序列号:
void TCPSender::receive(const TCPReceiverMessage& msg)
{// 处理错误状态if (input_.has_error())return;if (msg.RST) {input_.set_error();return;}// 更新接收方窗口大小window_size_ = msg.window_size;// 如果没有确认号,直接返回if (!msg.ackno)return;// 将相对确认号转换为绝对序列空间const uint64_t ack_abs = msg.ackno->unwrap(isn_, next_seqno_);// 验证确认号if (ack_abs > next_seqno_)return; // 确认了未发送的数据bool acked = false;// 处理所有完全确认的段while (!outstanding_messages_.empty()) {const auto& front_msg = outstanding_messages_.front();const uint64_t segment_end = ackno_ + front_msg.sequence_length();if (segment_end > ack_abs)break; // 部分确认// 更新跟踪信息acked = true;ackno_ = segment_end;bytes_in_flight_ -= front_msg.sequence_length();outstanding_messages_.pop();}// 如果有段被确认,重置定时器状态if (acked) {timer_ = 0;current_RTO_ms_ = initial_RTO_ms_;consecutive_retransmissions_ = 0;timer_running_ = !outstanding_messages_.empty();}
}
2.4.3 tick函数
tick函数处理重传定时器逻辑,当定时器超时时重传最早的未确认段:
void TCPSender::tick(uint64_t ms_since_last_tick, const TransmitFunction& transmit)
{// 只有在定时器运行时更新计时器if (timer_running_) {timer_ += ms_since_last_tick;}// 检查超时条件if (timer_running_ && timer_ >= current_RTO_ms_ && !outstanding_messages_.empty()) {// 重传最早的未确认段transmit(outstanding_messages_.front());// 只有当窗口打开时应用指数退避if (window_size_ > 0) {consecutive_retransmissions_++;current_RTO_ms_ *= 2;}// 重置定时器以准备下一次可能的重传timer_ = 0;}
}
3 仓库地址
https://github.com/HeZephyr/minnow