ar 导航导览技术如何实现的?室内外融合定位与ar渲染技术深度解析
本文面向:移动开发工程师、AR技术研究者、室内外导航系统产品经理,旨在提供核心问题的参考方案:如何实现室内外无缝切换的精准定位(GPS+蓝牙Beacon)虚拟导航路径与实景画面的实时叠加原理。
如需获取ar导航导航技术解决方案可前往文章最下方获取,如有项目合作及技术交流欢迎私信作者。
一、系统架构
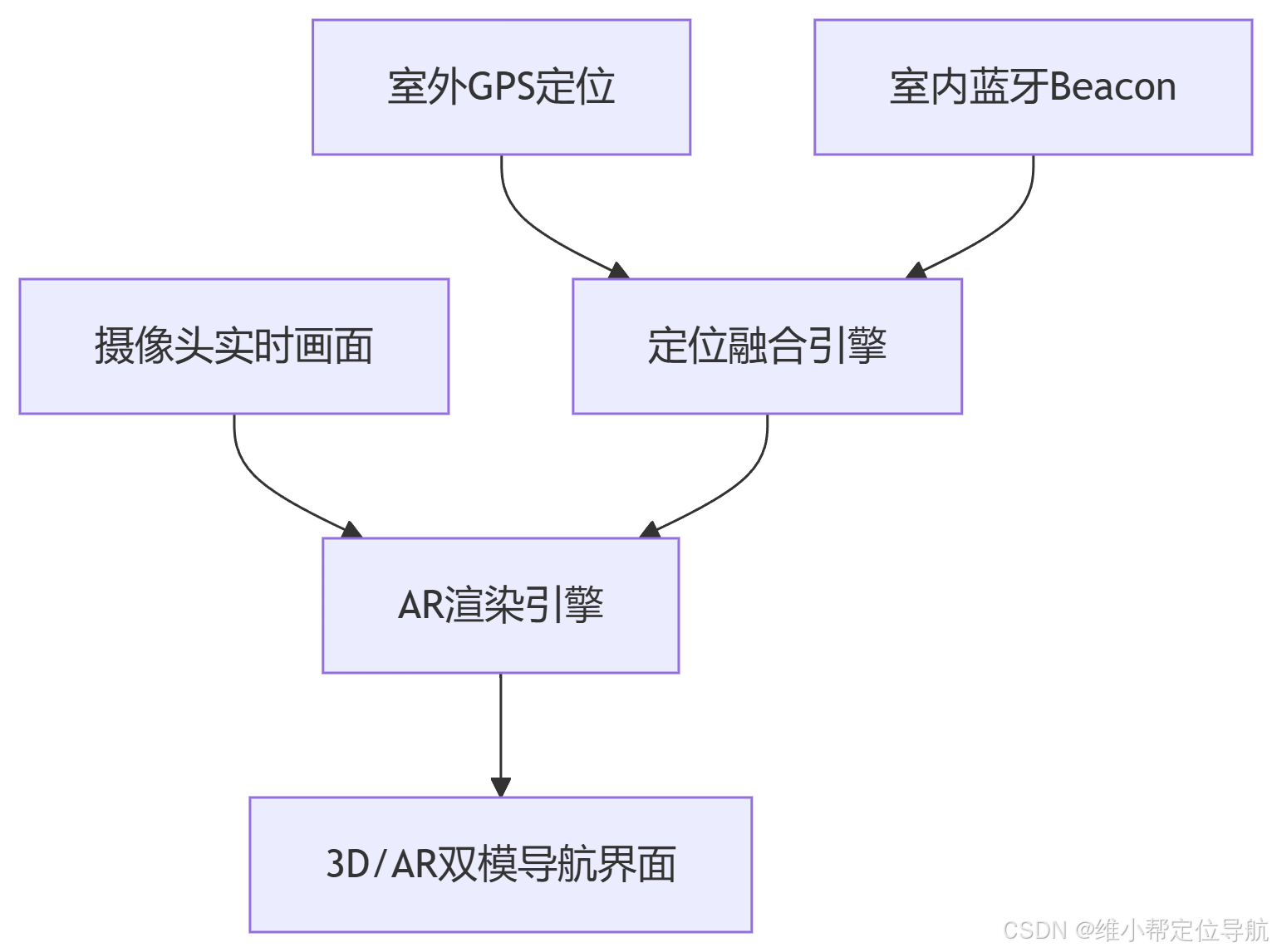
AR导航系统架构
二、关键技术实现原理
1. 室内外融合定位技术
# 代码:蓝牙指纹定位算法
def bluetooth_positioning(beacons):fingerprint_db = load_fingerprint_database() # 预存位置指纹库current_rssi = {beacon.mac: beacon.rssi for beacon in beacons}# 采用KNN算法匹配最近邻位置positions = []for pos, rssi_map in fingerprint_db.items():distance = 0for mac, rssi in current_rssi.items():if mac in rssi_map:distance += (rssi - rssi_map[mac])**2positions.append((pos, distance**0.5))# 返回误差最小的位置return min(positions, key=lambda x: x[1])[0]平滑切换技术栈:
| 模式 | 定位方式 | 渲染技术 |
|---|---|---|
| 室外 | GPS+IMU融合 | 3D矢量地图 |
| 过渡区 | 蓝牙信号强度 | 动态模糊切换 |
| 室内 | Beacon指纹定位 | AR实景叠加 |
2. AR路径实时叠加原理

其中:
-
$T_{world}^{camera}$:世界坐标系到相机坐标系的变换矩阵(通过融合定位获取)
-
$P_{route}$:路径规划生成的3D导航点坐标
三、工程实践:Unity中的AR导航实现
// 基于WebGL引擎的AR路径渲染
public class ARNavigationRenderer : MonoBehaviour
{public Camera arCamera;public LineRenderer virtualPath;void UpdateARPath(Vector3[] worldPoints) {virtualPath.positionCount = worldPoints.Length;for (int i = 0; i < worldPoints.Length; i++) {// 关键坐标转换:世界坐标→相机视口坐标Vector3 viewportPos = arCamera.WorldToViewportPoint(worldPoints[i]);// 深度校正(解决路径遮挡问题)if(viewportPos.z > 0) {virtualPath.SetPosition(i, arCamera.ViewportToWorldPoint(new Vector3(viewportPos.x, viewportPos.y, 1))); // 1米深度}}}▎实际案例
-
上海某购物中心引入AR 导航后,品牌店铺平均访问量提升 35%,消费转化率增长22%

四、经验总结与行业建议
1. 开发者的实践经验
- 定位算法需动态调优:不同场景(如地下停车场与商场)的信号特性差异大,需针对环境特性调整权重参数。
- 用户交互设计优先:AR 导航需避免信息过载,建议采用“渐进式引导”。(如先显示方向箭头,再叠加路径细节)。
2. 行业落地建议
- 标准化蓝牙信标部署:制定统一的信标布局规范(如每20米部署1个Beacon),降低后期维护成本。
- 开放API生态:提供标准化接口,支持与企业现有管理系统,如CRM、ERP等自有系统集成,提升技术复用性。
AR 导航导览技术的核心,在于用技术消解“虚拟信息与真实空间”的认知鸿沟。未来,随着5G与物联网技术的成熟,这类“所见即所得”的导航模式,或将成为智慧场景的标配基础设施。
如需AR 导航导览技术解决方案可前往↓