自主导航巡检机器人系统解决方案
自主导航巡检机器人系统解决方案
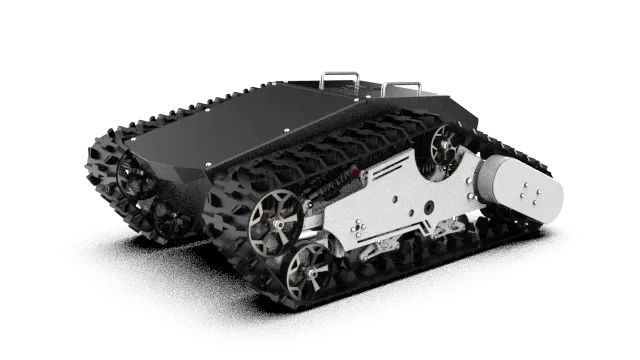
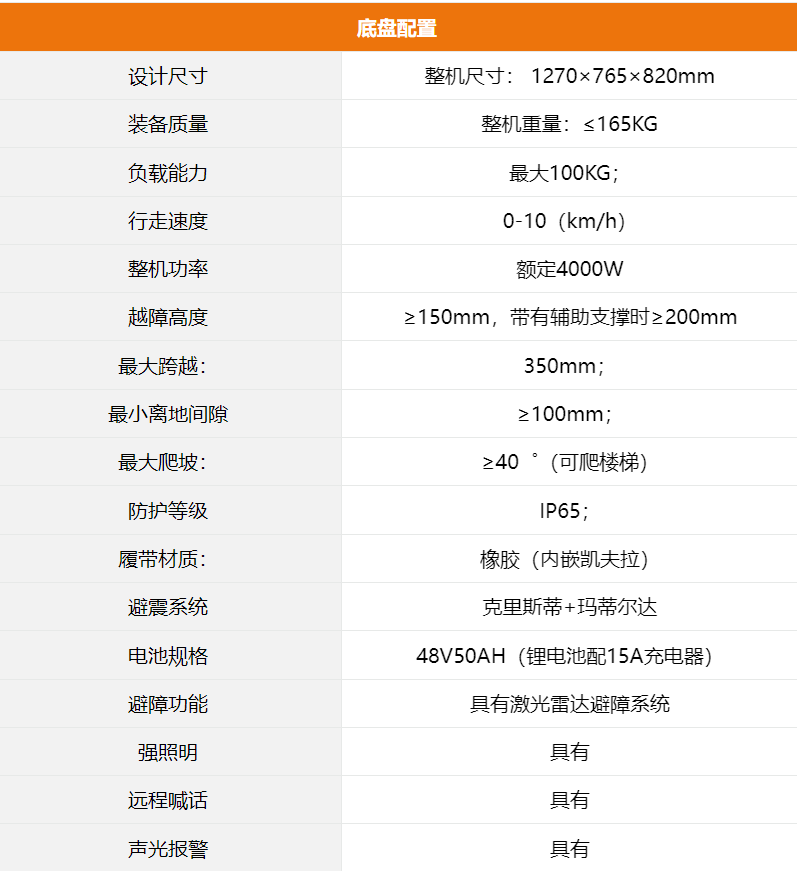
运动性能强大的通用型履带式机器人底盘,整车采用克里斯蒂全独立悬挂设计,内部搭载高扭矩无刷电机,通过精心匹配的底盘高度和功率配置,底盘表现出卓越的通过性能、低重心、平稳运行以及高效的传动效率,这使得它成为各行业设备移动方案的理想选择,例如在侦查、巡检、勘探、消防等特种机器人行业中具备广泛的应用前景。



融合建图
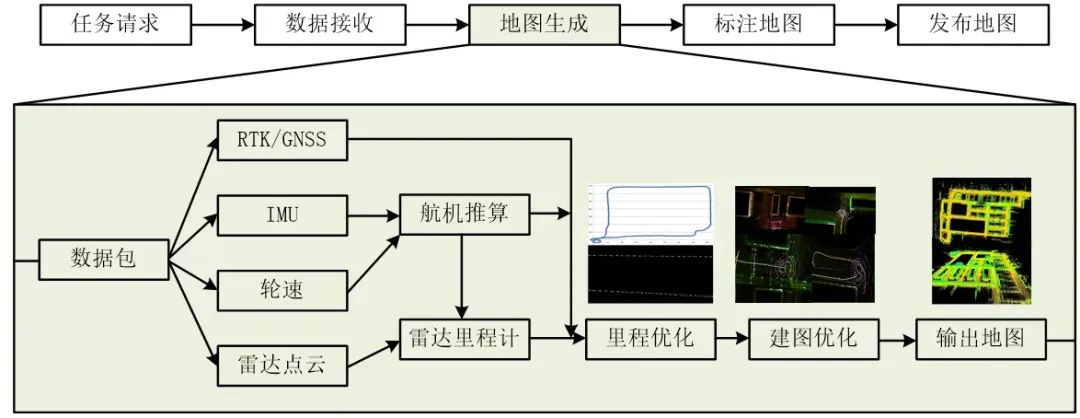
高精度点云地图是实现高精度定位的必要条件,建图的过程包括:建图任务请求、不同传感器的数据收集、生成点云地图、标注地图、发布自动驾驶使用的地图。其中最为关键的是生成高精度的点云地图。
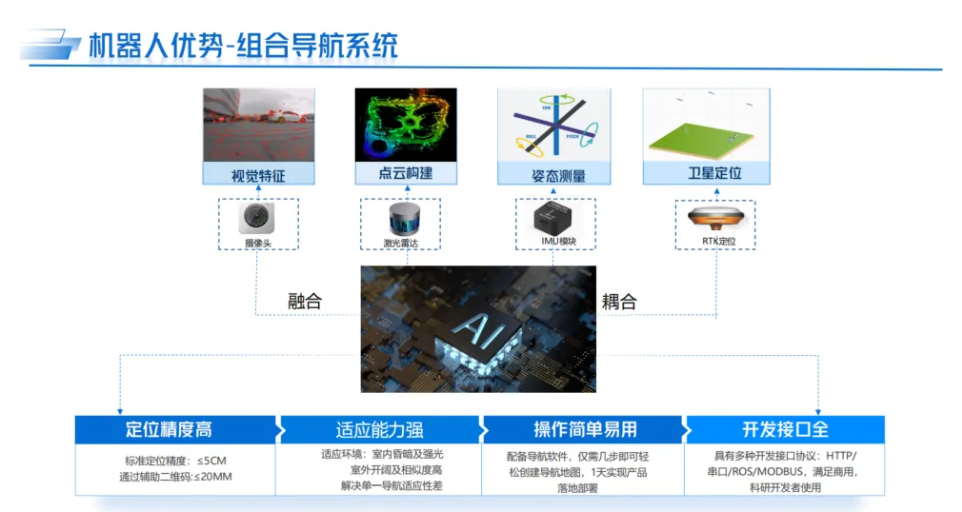
在生成点云地图的过程中,由于雷达、IMU、里程计融合建图中航迹推算为积分量,随着时间误差逐渐积累;故为了提高建图精度,在原来的基础上增加绝对定位的高精度RTK/GNSS系统,进行融合建图,建图的基本流程如下,同样对IMU和轮速进行航迹推算,获得相对的里程计结果,经过航迹推算短时间内里程计精度较高,随着RTK/GNSS系统加入,不断的消除航迹推算的累计误差,然后对雷达里程计进行优化,提高雷达里程计的精度,得出高精度的雷达里程计之后进行点云堆积,最后使用图优化或者回环检测进行点云图优化输出地图。获得点云图之后,进行与实际环境对应的语义标注和路线规划,最终输出自动驾驶系统使用的点云地图。


测温型双光谱热成像台摄像机

产品特点
● 集成了红外热成像、可见光摄像机、云台控制系统,实现了昼夜全方位视频监控;
● 采用测温热成像技术,不受光源限制,成像清晰;
● 日夜型200万星光级低照度彩色摄像机,可实现细节观察;
● 可见光摄像机和热成像摄像机同一IE或者客户端管理,设置;
● 支持标准ONVIF协议,后端兼容市场标准onvif录像机录像和控制;
● 3D定位功能,能实现框选放大和点击居中功能,降低操作难度,提高设备易用性;
● 万向变速云台,实现了全方位无盲角监控,并做到了高精度定位;
● 全国首创独立除雾除霜模块,真正意义上解决室外环境温差导致的相机仓镜头起雾;
●云台标配独创的稳压模块,过滤车辆瞬时的不稳定电流,使云台保持稳定状态。
热成像
1、极佳的热成像图像效果384*288分辨率;
2、AGC自动增益调节、3D降噪、DDE图像细节增强;
3、黑热/白热/铁红/彩虹等多种伪彩(14种伪彩可调);
4、精确测温,最高温十字定位;
5、支持1条线测温 10个框测温和10个点测温;
6、测温范围:-40℃-550℃,测温精度:±2度(或者量程的±2%);
7、温度异常报警,支持2路硬件报警输入、2路报警输出;
8、支持标准ONVIF协议,支持SDK。
可见光摄像机:
1、分辨率200万高清,1920*1080P分辨率;
2、20倍/30倍光学变焦可选;
3、标准ONVIF协议,支持H.264和H.265解码
云台
1、水平方向360°连续旋转,垂直60°~ -90°,键控速度水平0.1°-110°/s 垂直0.1°-50°/s;
2、256个预置位,并具有预置点视频冻结功能;
3、 6条巡航扫描,每条可添加32个预置点;
4、 4条花样扫描,每条路径记录时间大于10分钟;
5、全国首创独立除雾除霜模块,真正意义上解决室外环境温差导致的相机仓镜头起雾;
6、相机仓选用高品质加热零件,使整个仓体前后共同作用形成有效防雾除雾格局;
7、云台采用上下主轴一体化结构,使云台相机仓、红外仓不会颠簸而错位;
8、云台标配独创的稳压模块,过滤车辆瞬时的不稳定电流,使云台保持稳定状态;
9、支持大于50米红外补光,支持雨刷。
变焦云台相机

A8 mini是一款迷你云台相机,身形轻巧,搭载4K 1/1.7英寸索尼星光夜视传感器,基于神经网络处理器的强大AI跟踪识别,最大支持6倍数码变焦,网口、HDMI视频输出可适配图传链路产品,更有CVBS(AV)输入支持模拟图传,广泛应用于行业无人机、无人车船、机器人、航模固定翼穿越机领域。