70°视场+亚兆赫兹切换!硅光芯片上的「激光万花筒」登《Nature》封面
前言摘要
这项突破性研究来自加州大学伯克利分校的Ming C. Wu教授团队,主要作者包括Xiaosheng Zhang、Kyungmok Kwon等研究人员,成果发表于2022年3月的《Nature》期刊。研究团队在微机电系统(MEMS)和硅光子学领域具有深厚积累,此前已在大型光学开关阵列方面取得多项重要突破。
技术核心:颠覆传统的“焦平面开关阵列(FPSA)
传统激光雷达依赖笨重的机械旋转部件扫描激光束,限制了小型化和可靠性。Wu团队的核心创新在于 “焦平面开关阵列” 设计:
1.超高密度集成:在指甲盖大小的硅光芯片上,集成了128×128=16,384个独立像素单元。每个像素包含一个MEMS光开关和一个曲面光栅天线。
2.MEMS光开关革命:
零功耗待机:开关关闭时几乎无光损耗(仅波导传播损耗)。
微秒级切换:行开关响应时间仅1.1μs(开)/0.6μs(关),列开关约2.7μs/2.0μs,支持亚兆赫兹(MHz)随机寻址。
超小尺寸:单个像素单元仅55×55μm²,未来可缩至10×10μm²,实现百万像素级阵列。
3.行-列寻址巧思:通过独创的电路设计,将控制信号数量从海量的`N²`(例如128²=16384)大幅降低至`2N`(仅256路),解决了大规模阵列的控制难题。
4.智能光栅设计:每个光栅天线的方向和周期根据其在阵列中的位置单独优化,确保光束精确射向透镜中心,提升效率并减少像差,整体发射效率 >65%。
研究意义
打破固态LiDAR分辨率天花板
这项研究首次将集成2DFPSA的像素规模提升至万级,彻底突破了传统固态LiDAR的分辨率瓶颈。对比此前最大的400像素MEMS FPSA,16384像素阵列的视场角扩大了4倍以上,角分辨率提升10倍,使LiDAR在无需机械扫描的前提下,达到接近传统机械LiDAR的环境感知精度,为自动驾驶汽车实时构建高清三维环境地图提供了核心技术支撑。
01
FPSA的架构和工作原理
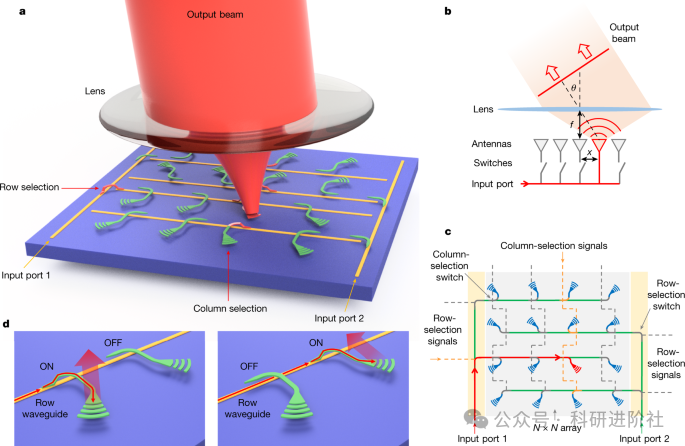
a 二维FPSA的透视示意图,包含透镜和输出光束。光通过其中一个输入端口耦合到FPSA芯片上,然后通过开启相应的行选开关和列选开关,将光路由到选定的光栅天线。透镜将发射出的光转换为准直光束。
b 展示工作原理的一维FPSA光束扫描器示意图。
c 二维FPSA设计的俯视示意图。
d MEMS光学开关和光栅天线在开启(ON)和关闭(OFF)状态的示意图。在开启(ON)状态时,多晶硅耦合波导(绿色)的尖端被下拉靠近总线波导(黄色),从而将光耦合到光栅天线。
02
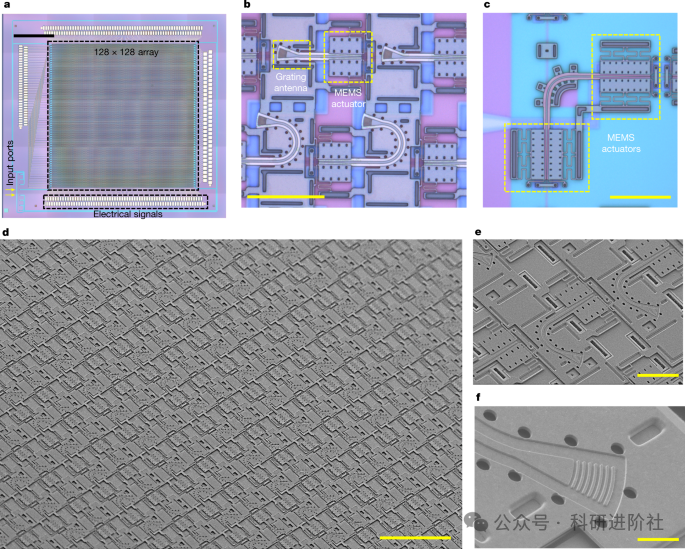
制备的FPSA器件的显微图像
a–c 显示FPSA芯片 (a)、带有列选开关的光栅天线 (b) 和行选开关 (c) 的显微图像。
d–f FPSA芯片 (d)、列选开关 (e) 和光栅天线 (f) 的扫描电子显微镜 (SEM) 图像。
比例尺:a 2mm;b和c 40μm;d 100μm;e 20μm;f 4μm。
03
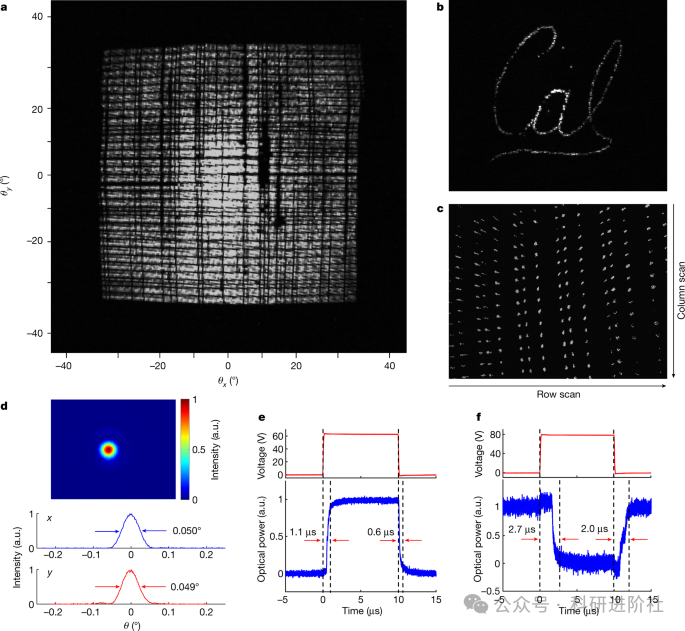
FPSA光束扫描器的表征
a 投射在纸屏上的光束转向图样,展示了70°×70°的视场(FoV)。
b 在纸屏上投射的扫描“Cal”徽标图案,由475个独立输出光束方向构成。
c 在傅里叶透镜焦平面处捕获的放大光束转向图样。
d 在距离FPSA光束扫描器0.71米处测量的光束轮廓(光斑)。
e-f FPSA中行选开关(在下载端口测量的光功率,22次测量的平均值)(e) 和列选开关(在直通端口测量的光功率,32次测量的平均值)(f) 的动态响应曲线。红色曲线显示施加的电压波形,蓝色曲线显示测量的光功率。
04
3D成像结果
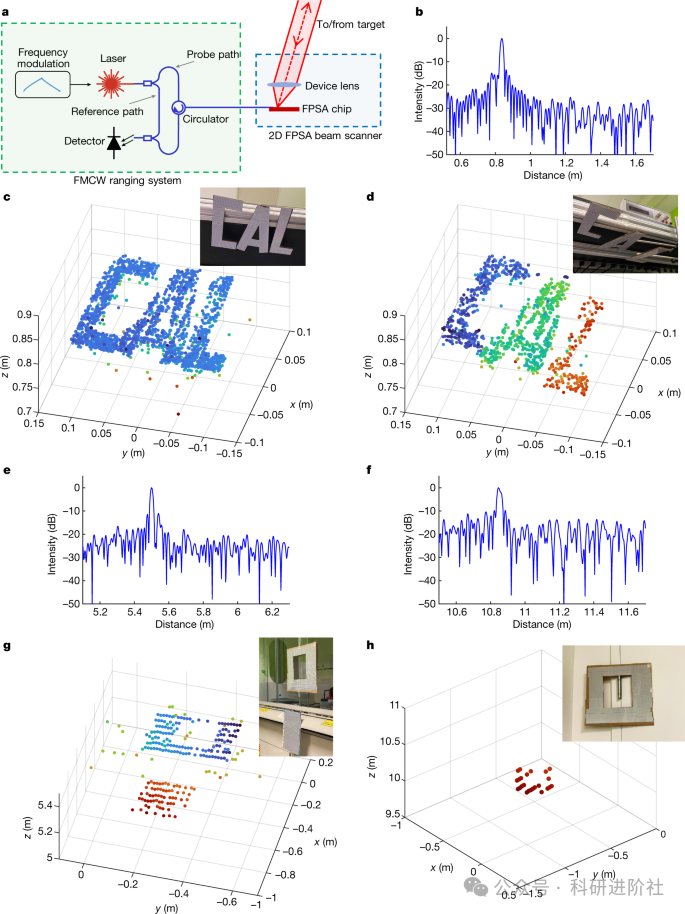
a 采用FPSA光束扫描器的FMCW激光雷达示意图。
b 目标位于0.84m处的典型FMCW激光雷达频谱。
c-d 位于同一平面(c)和不同平面(d)上、距离约0.8m处由三个字母组成目标的点云和相机图像。
e-f 目标位于5.5m(e) 和10.8m(f) 处的典型FMCW激光雷达频谱。
g-h 位于约5.2m(g) 和10m(h)处目标的点云和相机图像。点云按z坐标值着色。
开启3D感知“无处不在”的未来
这项研究的价值远超实验室:
1.彻底固态化:完全摒弃机械部件,解决了传统激光雷达体积大、成本高、可靠性差的致命痛点。
2.CMOS量产潜力:采用标准硅光子和MEMS工艺,可在现有半导体代工厂(如台积电、三星)大规模生产,成本有望大幅降低。
3.应用场景爆炸:
自动驾驶:车规级小型、廉价、高性能激光雷达的核心。
消费电子:智能手机、AR/VR设备内置高精度3D传感成为可能。
机器人&无人机:赋予更小、更智能的机器“慧眼”。
自由空间光通信:高速、精准的无线光通信指向。
4.遵循“摩尔定律”:如同摄像头芯片从十万像素发展到亿级像素,该技术路线可通过提升芯片尺寸、缩小像素,轻松实现百万像素级激光雷达,角分辨率可达0.02°。
3D世界的“摄像头时刻”来临
Wu教授团队这项突破性研究不仅为固态LiDAR设立了新标准,更预示着3D传感技术将像数码相机一样迎来爆发式增长。随着进一步优化和量产,这种高性能、小型化的LiDAR技术有望成为未来智能设备的"标配",推动自动驾驶、增强现实等技术的快速普及,真正实现"让机器看懂三维世界"的愿景。
这项研究也展示了硅光子学与MEMS技术结合的强大潜力,为下一代集成光电系统开辟了新道路。正如研究人员所言:"这只是一个开始,百万像素3D成像LiDAR即将成为现实。"
Dio:https://doi.org/10.1038/s41586-022-04415-8
【注】:小编水平有限,若有误,请联系修改;若侵权,请联系删除!