当前位置: 首页 > ds >正文 34.2STM32下的can总线外设_csdn ds 2025/7/29 13:56:01 1、STM32中CAN总线的外设简介 2、CAN网拓扑结构 2.1、CAN收发器电路 2.2、CAN基本结构 2.3、发送过程 2.4、接收过程 2.5、发送和接收配置位 2.6、标识符过滤器 2.7、过滤器配置示例 2.8、测试模式 2.9、工作模式 2.10、位时间特性 2.11、中断 2.12、时间触发通信 2.13、错误处理和离线恢复 查看全文 http://www.xdnf.cn/news/12057.html 相关文章: 修改 Windows 10/11 的系统设置中显示的安装日期 CMake入门:1、环境搭建 防火墙设置实战操作案例(小白的“升级打怪”成长之路) FreeType 字体信息检查工具 - 现代C++实现 selenium学习实战【Python爬虫】 【贪心、DP、线段树优化】Leetcode 376. 摆动序列 当AI遇上防火墙:新一代智能安全解决方案全景解析 Elasticsearch中的自定义分析器(Custom Analyzer)介绍 2025最新Java日志框架深度解析:Log4j 2 vs Logback性能实测+企业级实战案例 一个完整的时间序列异常检测系统,使用Flask作为后端框架,实现了AE(自编码器)、TimesNet和LSTM三种模型,并提供可视化展示 Asp.Net Core基于StackExchange Redis 缓存 使用TypeScript构建一个最简单的MCP服务器 PDF处理控件Aspose.PDF教程:在 C# 中更改 PDF 页面大小 【从零学习JVM|第二篇】字节码文件 Android 项目的核心配置文件 数据结构第一章 边缘计算网关赋能沸石转轮运行故障智能诊断的配置实例 Flutter如何支持原生View Unity安卓平台开发,启动app并传参 如何配置一个sql server使得其它用户可以通过excel odbc获取数据 【大模型:知识图谱】--5.neo4j数据库管理(cypher语法2) rknn优化教程(一) DPO算法微调实战 微信小程序动态组件加载的应用场景与实现方式 双电机差速控制的MATLAB Simulink仿真方案,使用PWM和PID调节实现360°转向与速度控制 分类预测 | Matlab实现CNN-BiLSTM-Attention高光谱数据分类预测 PostgreSQL的扩展 pg_buffercache TDengine 开发指南——高效写入 BEV和OCC学习-3:mmdet3d 坐标系 知识拓展卡————————关于Access、Trunk、Hybrid端口
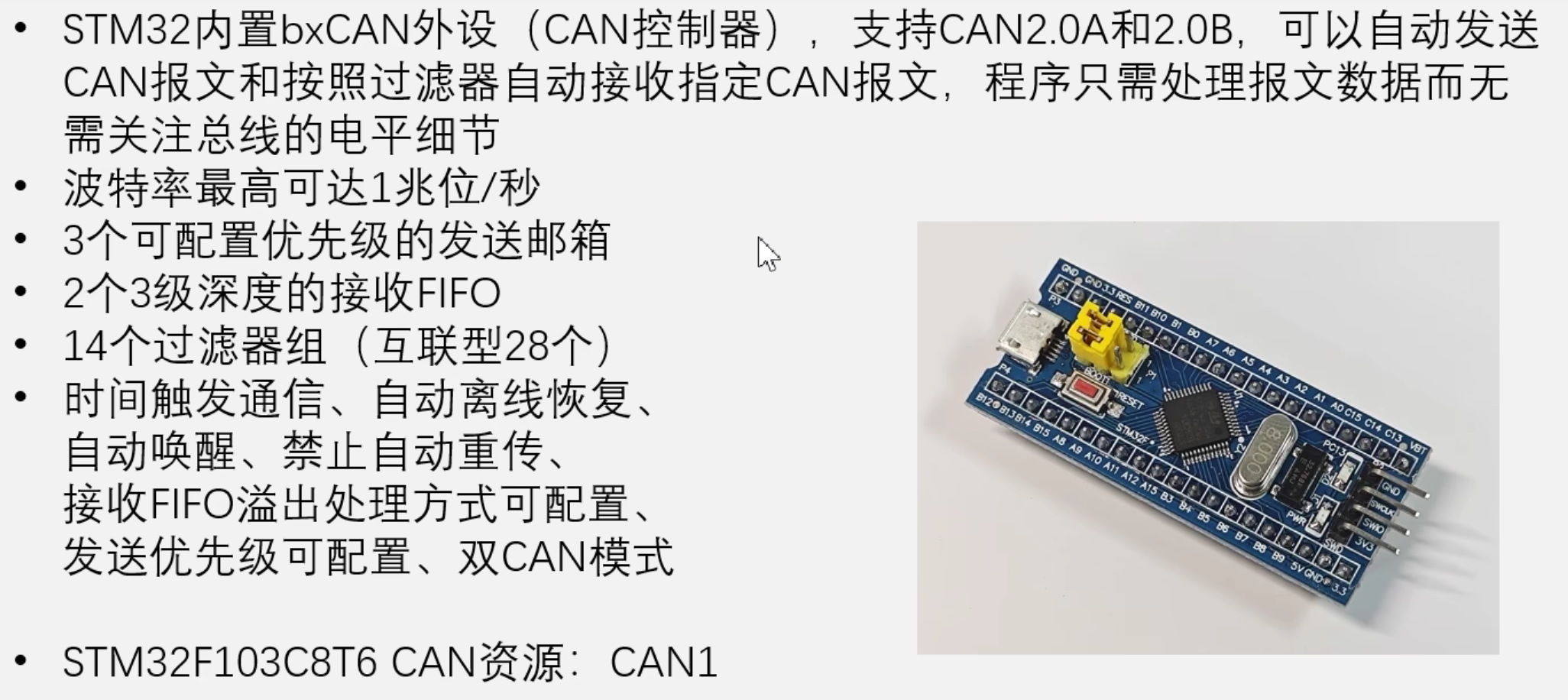
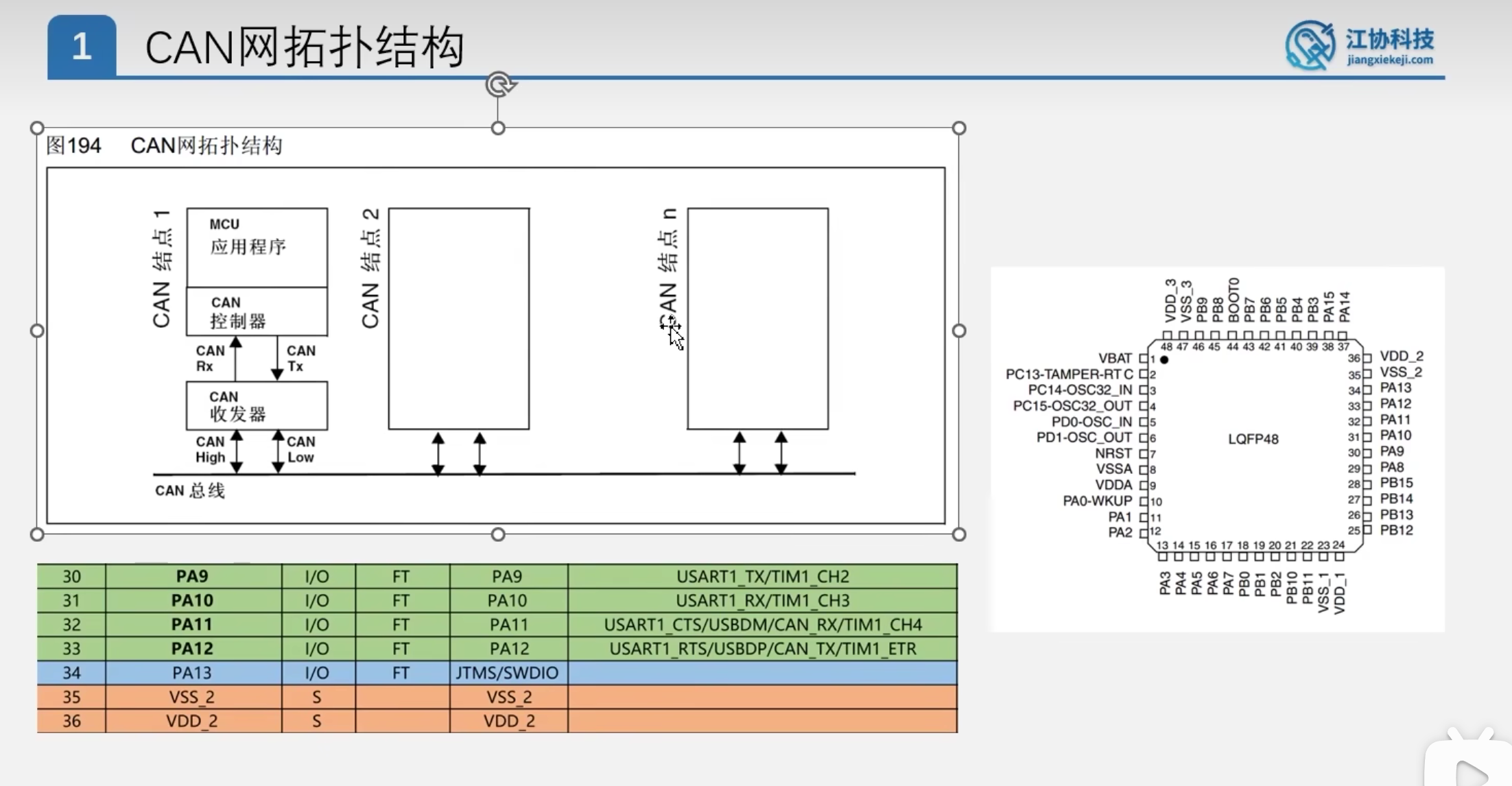
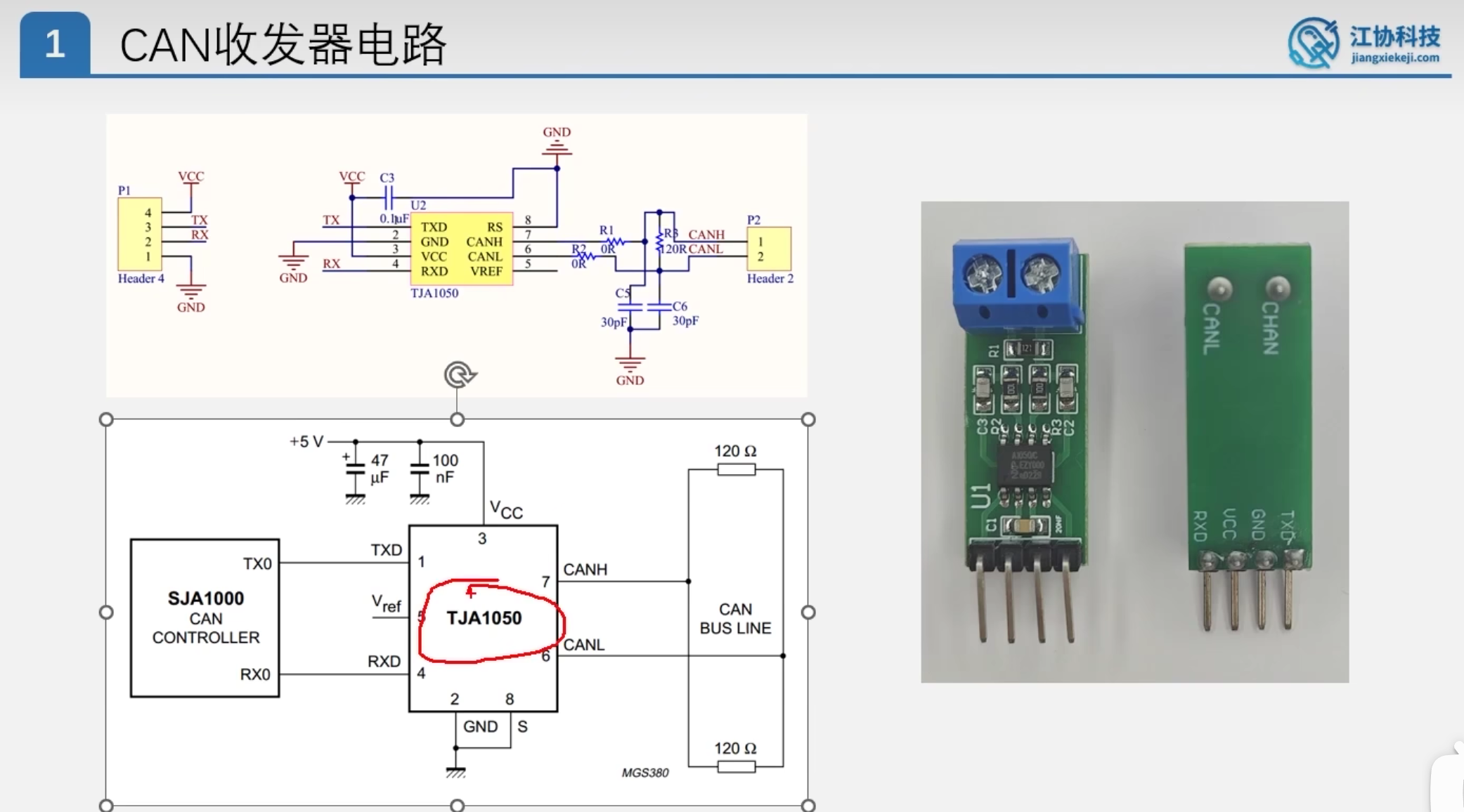
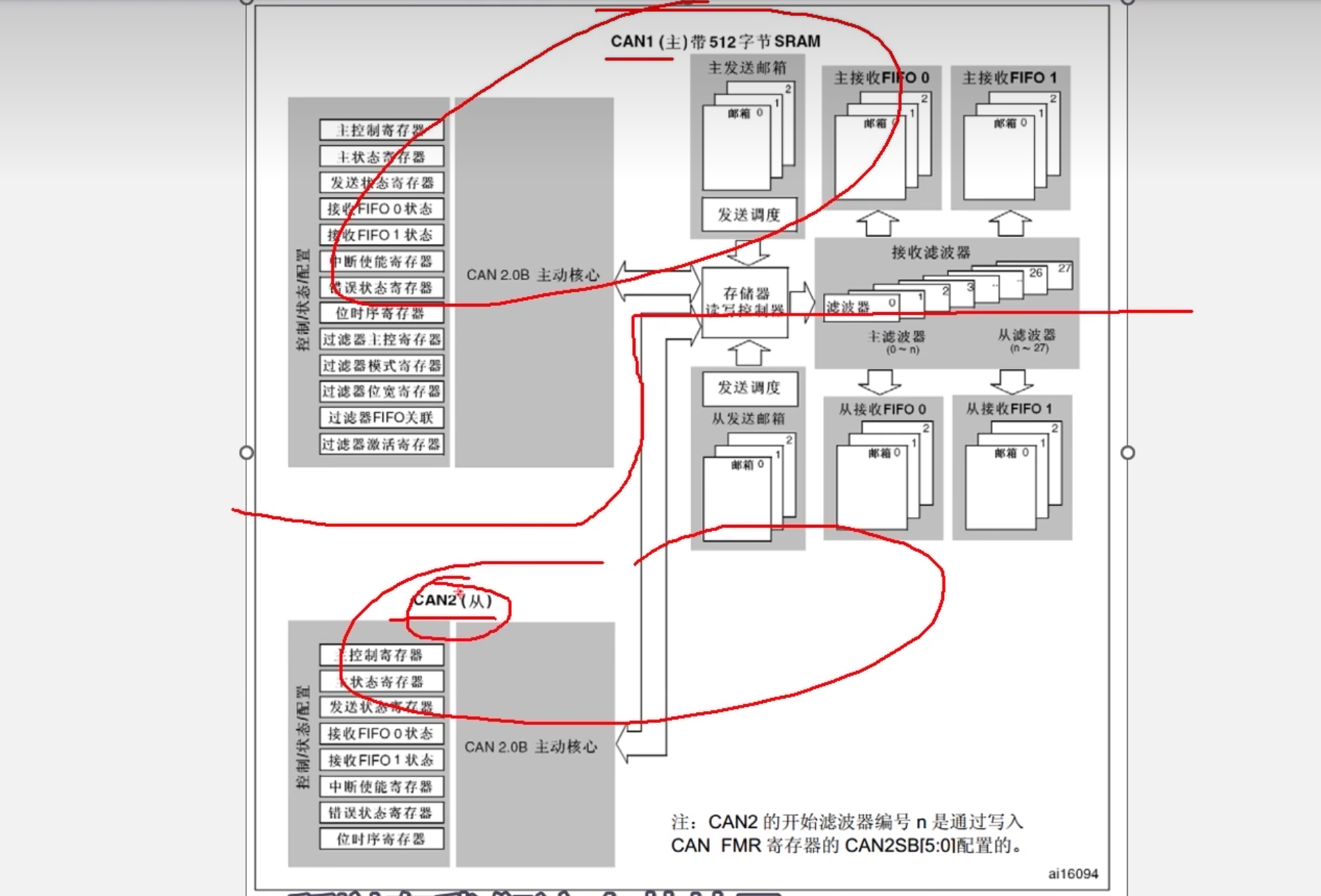
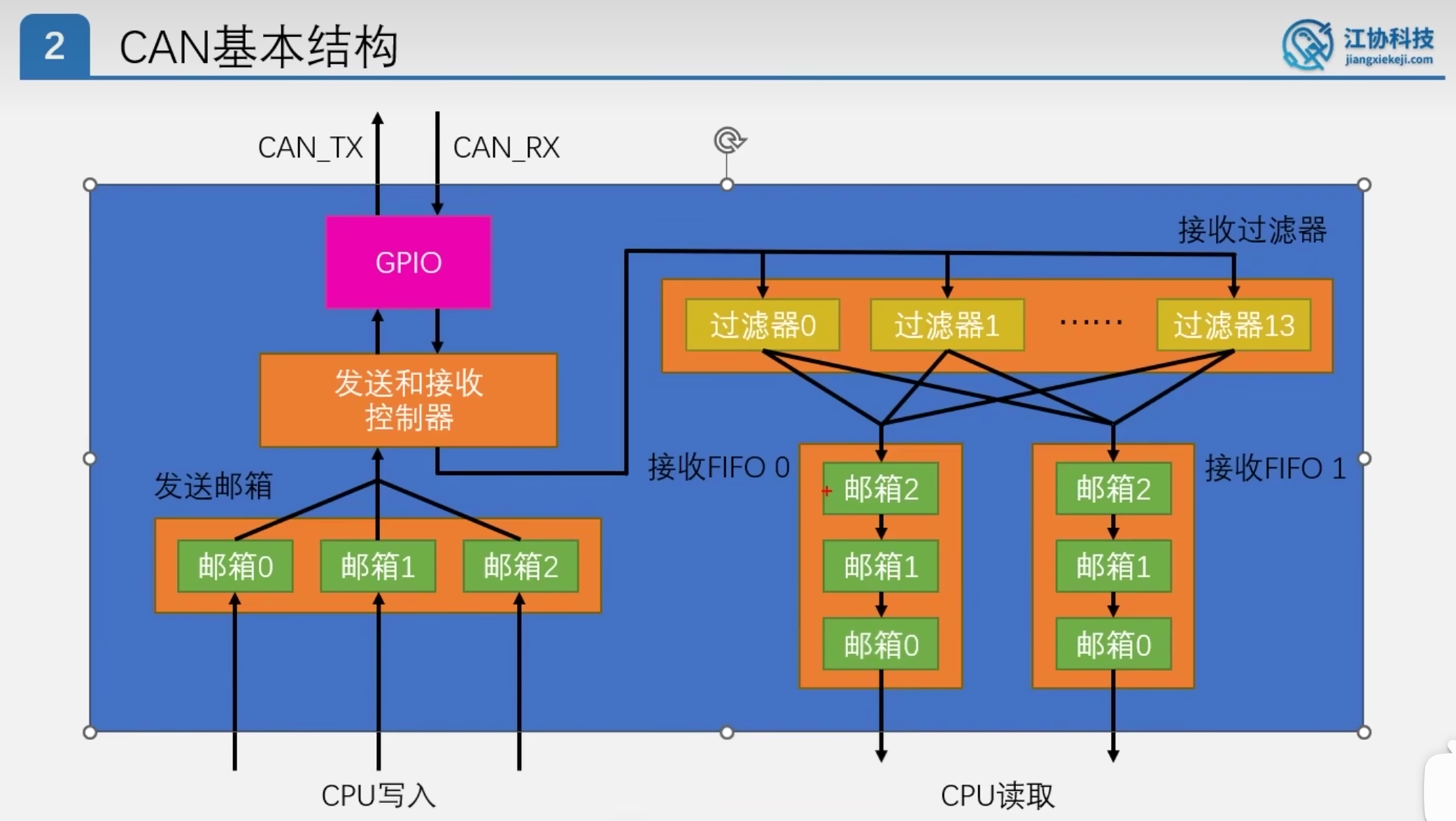
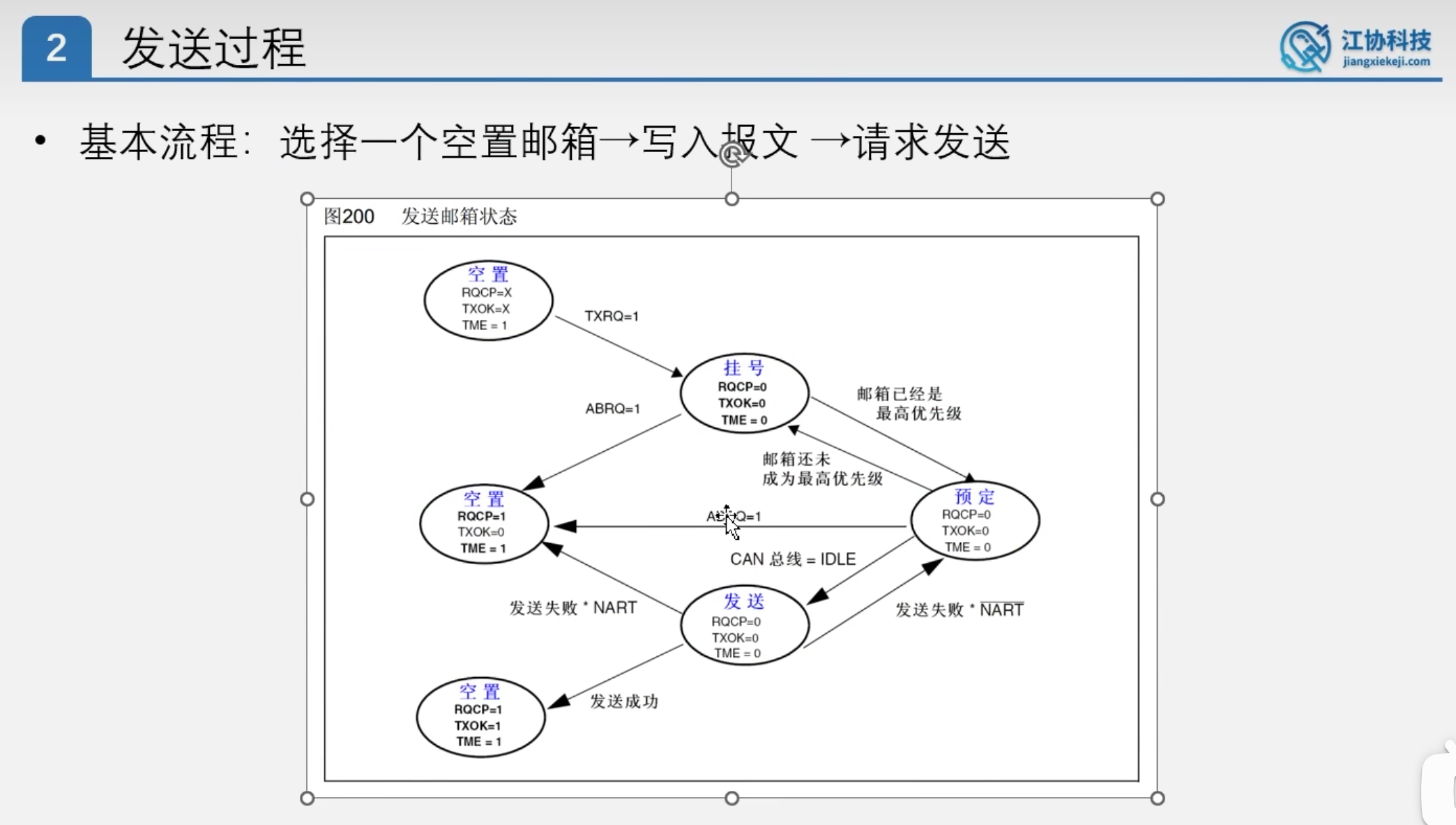
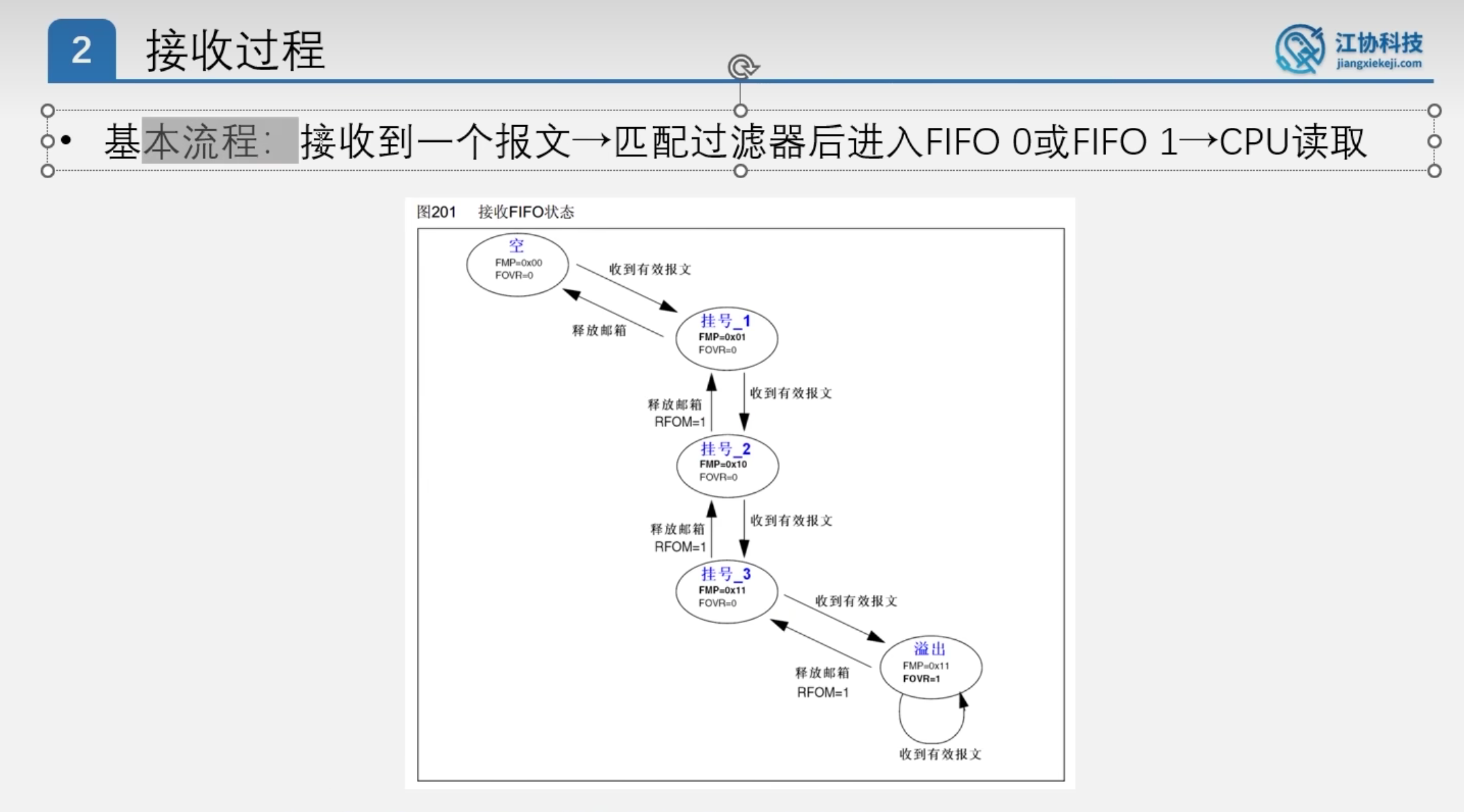
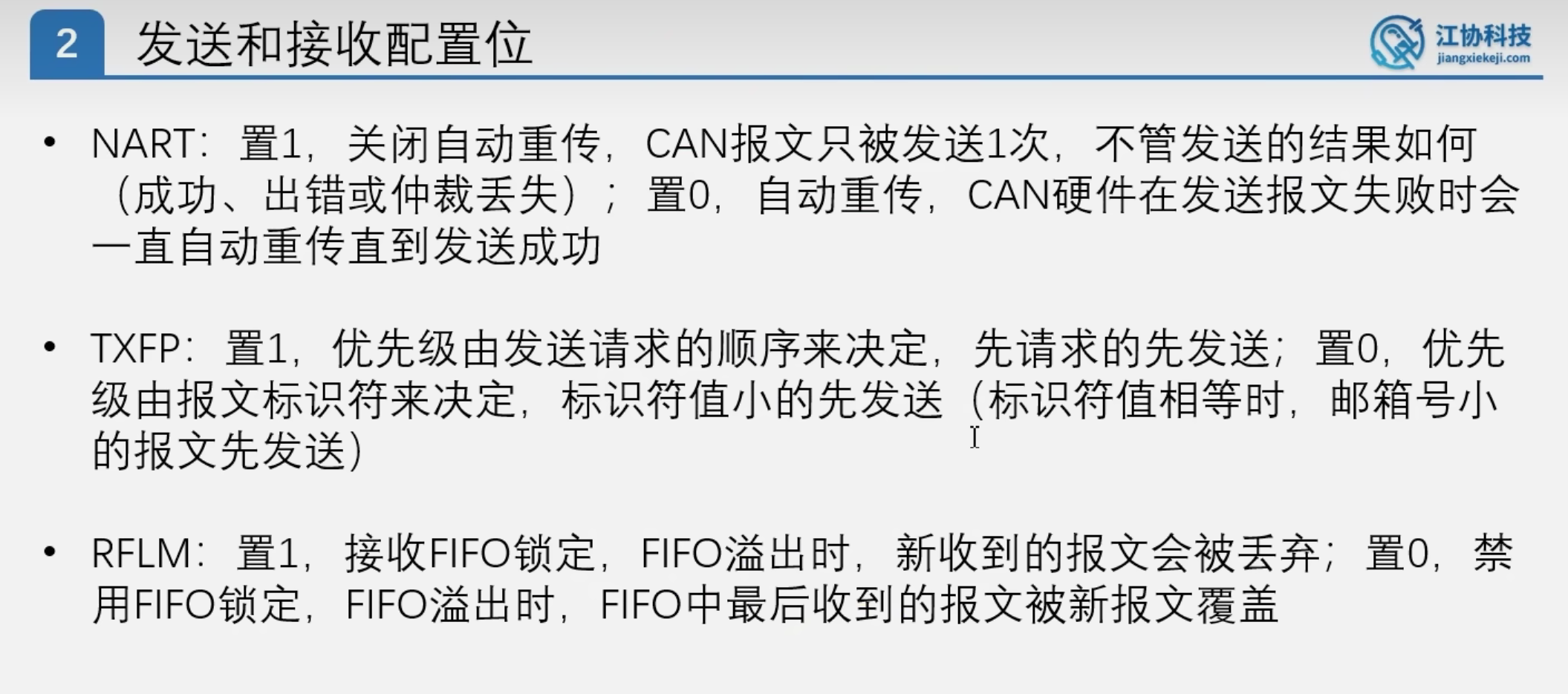
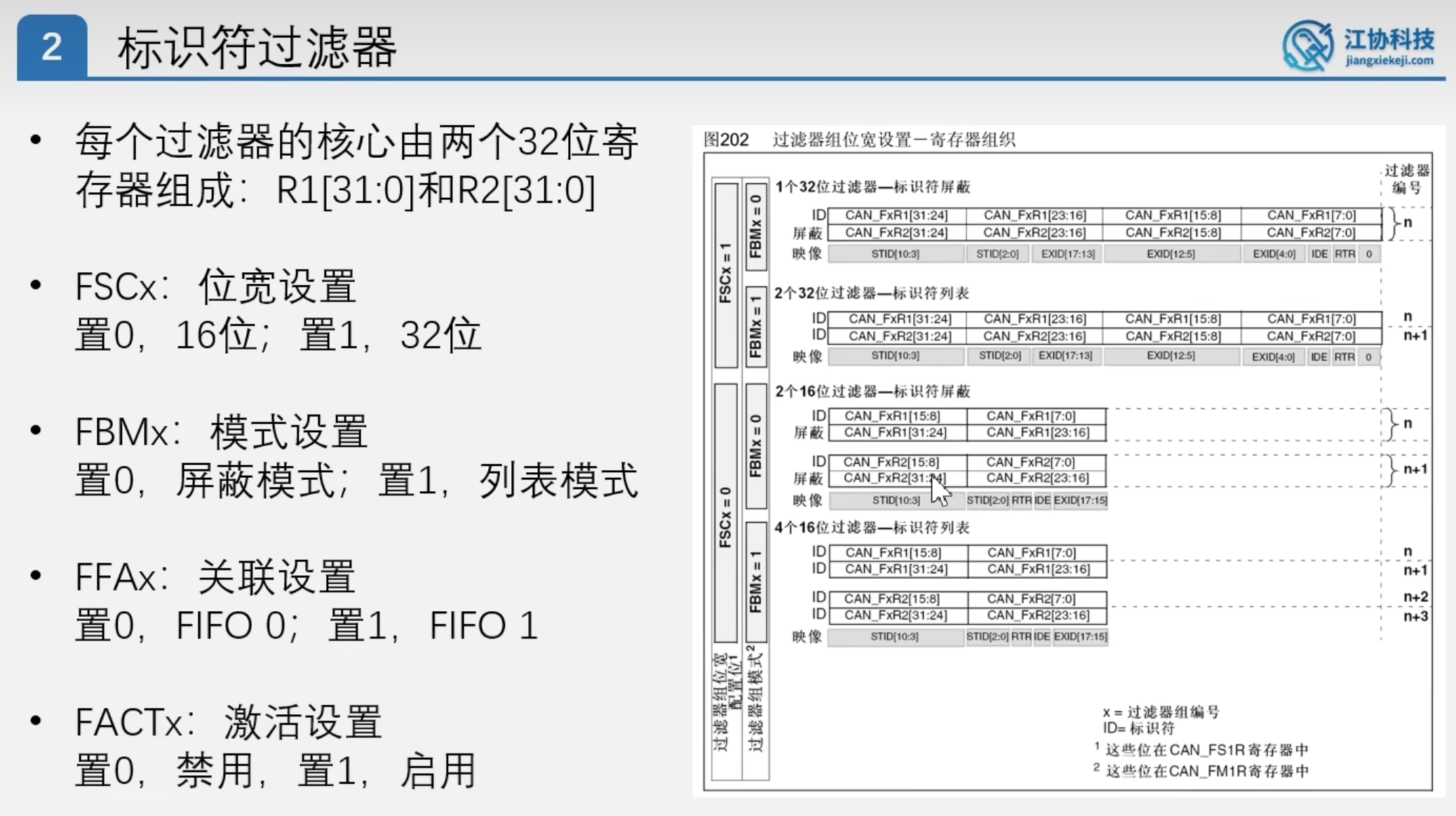
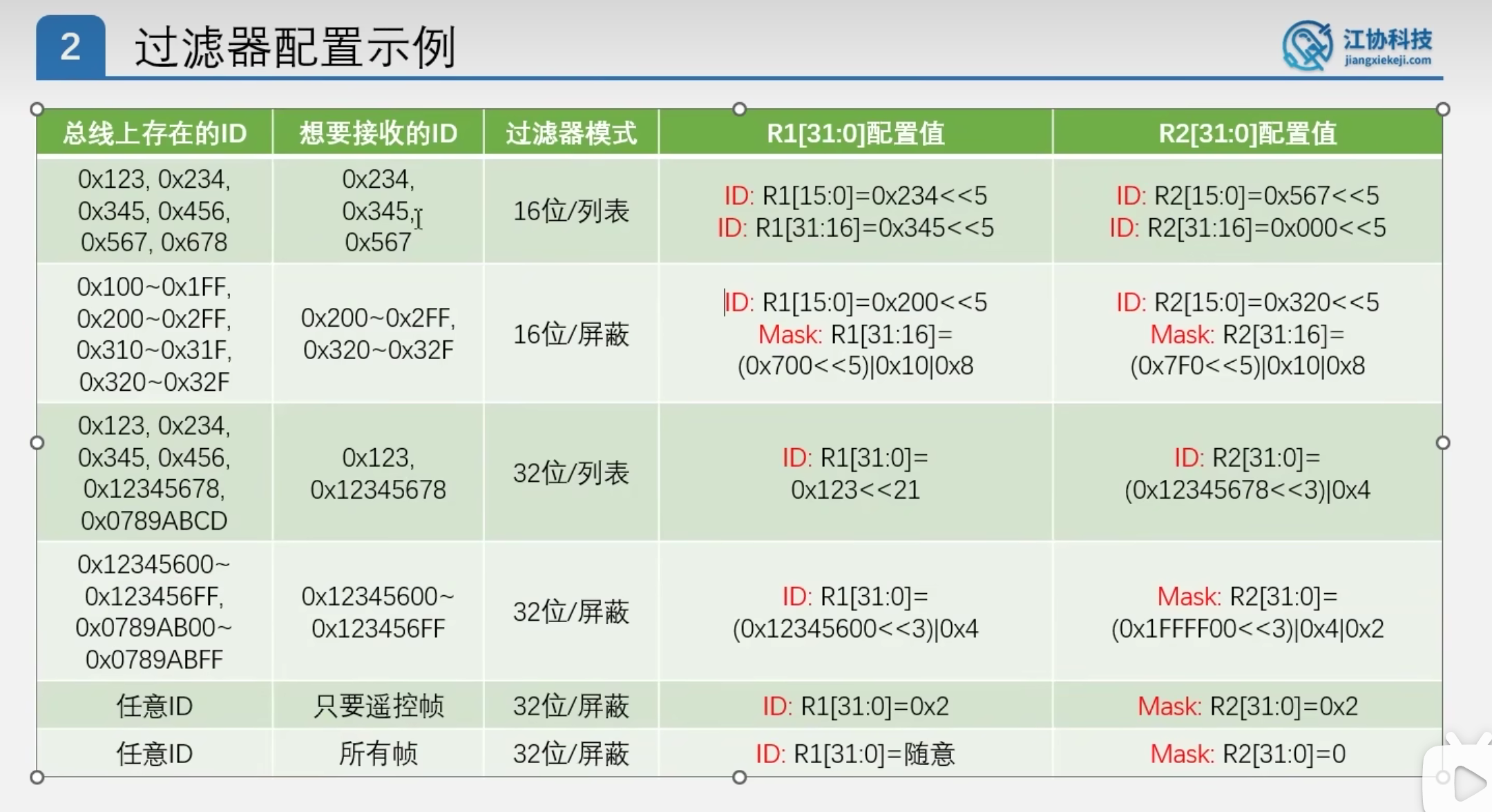
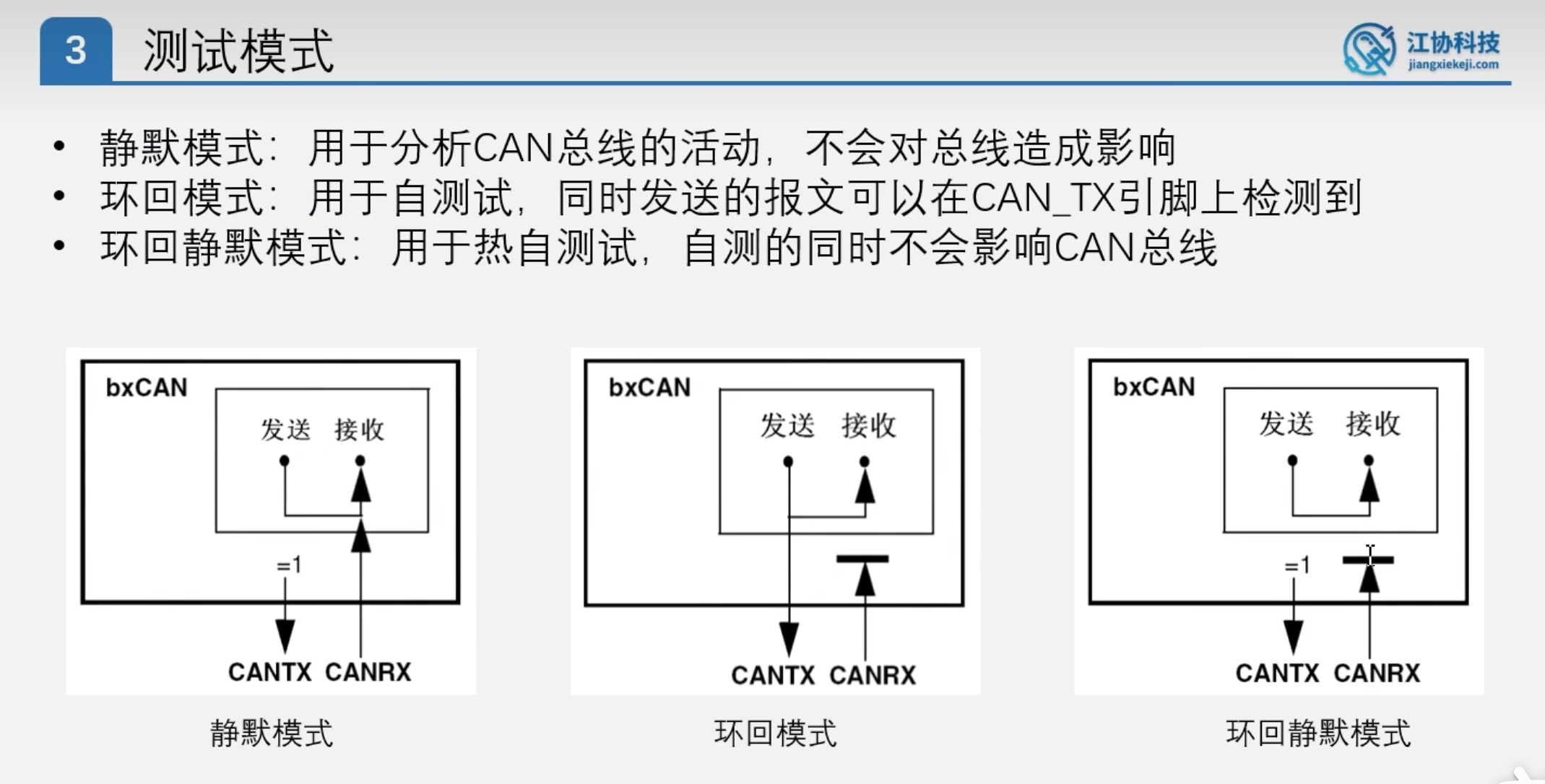
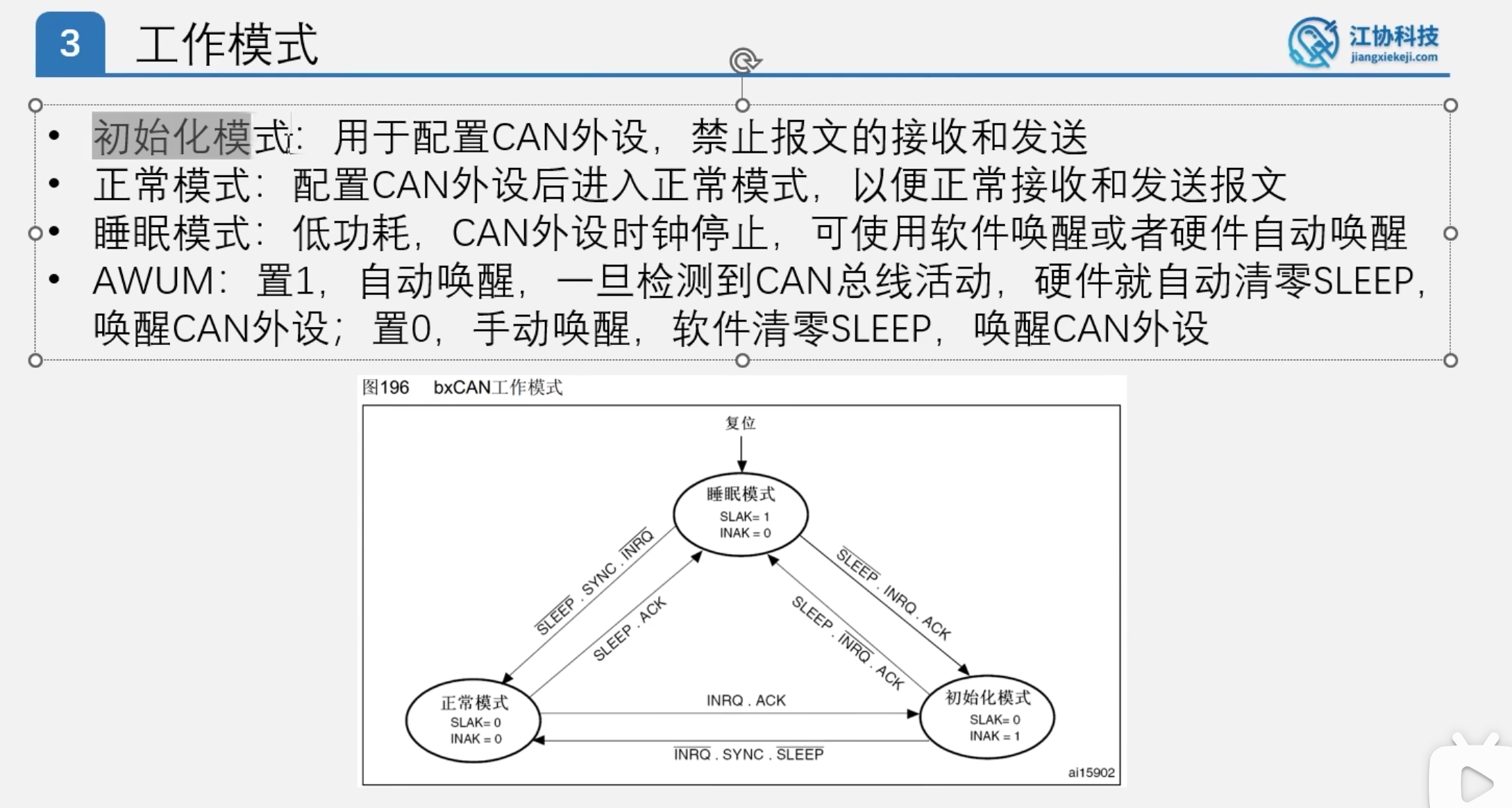
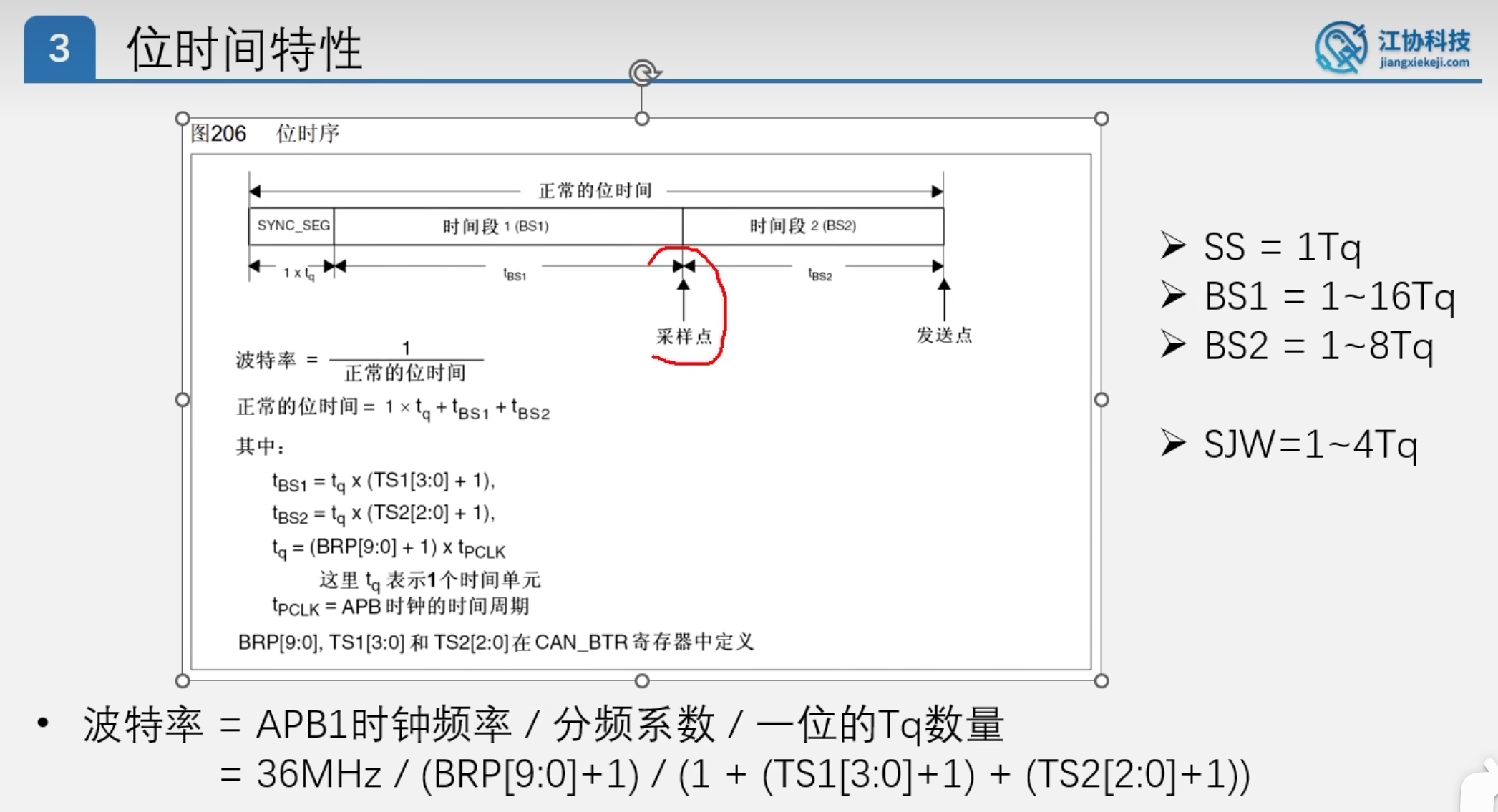
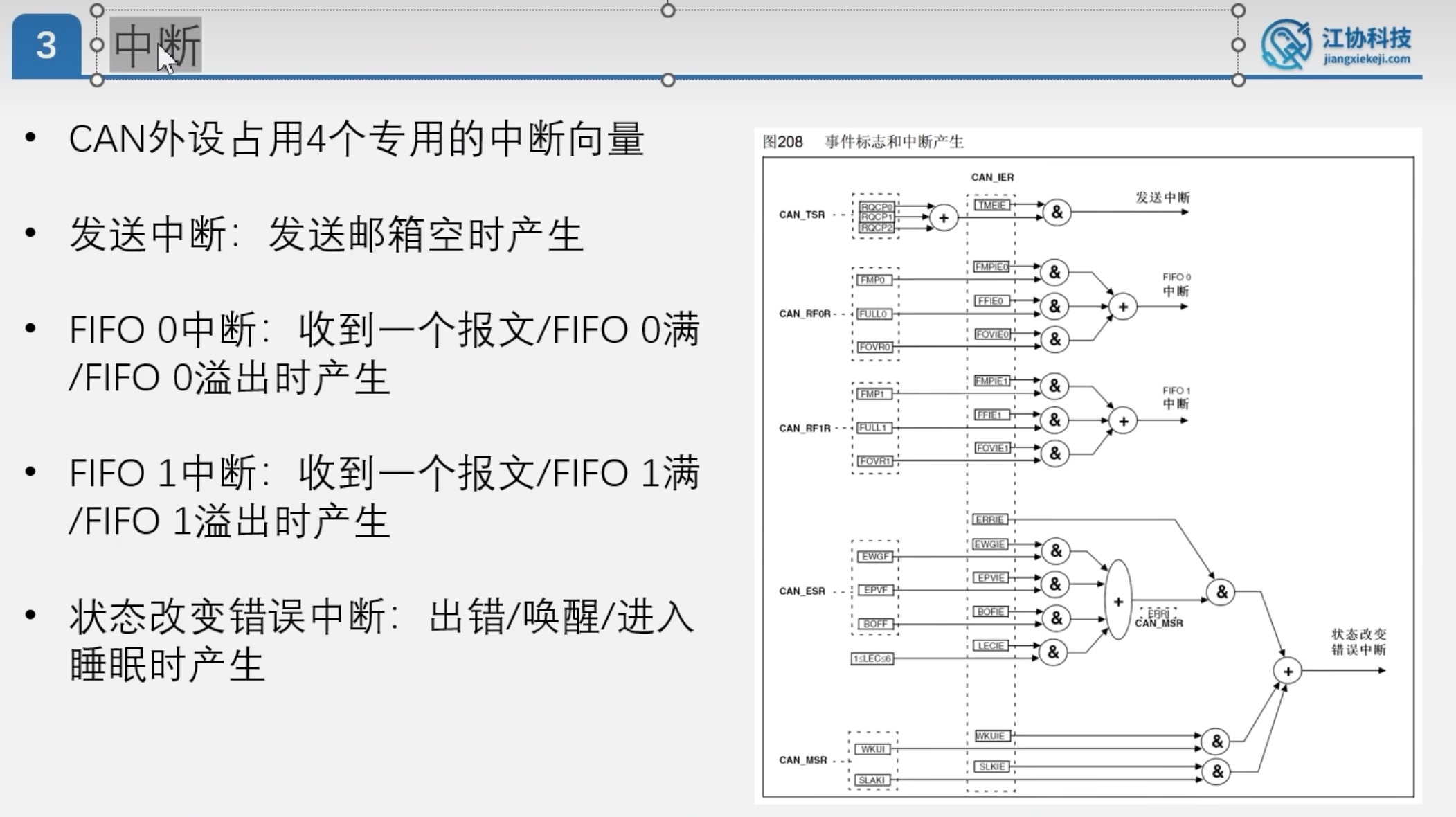
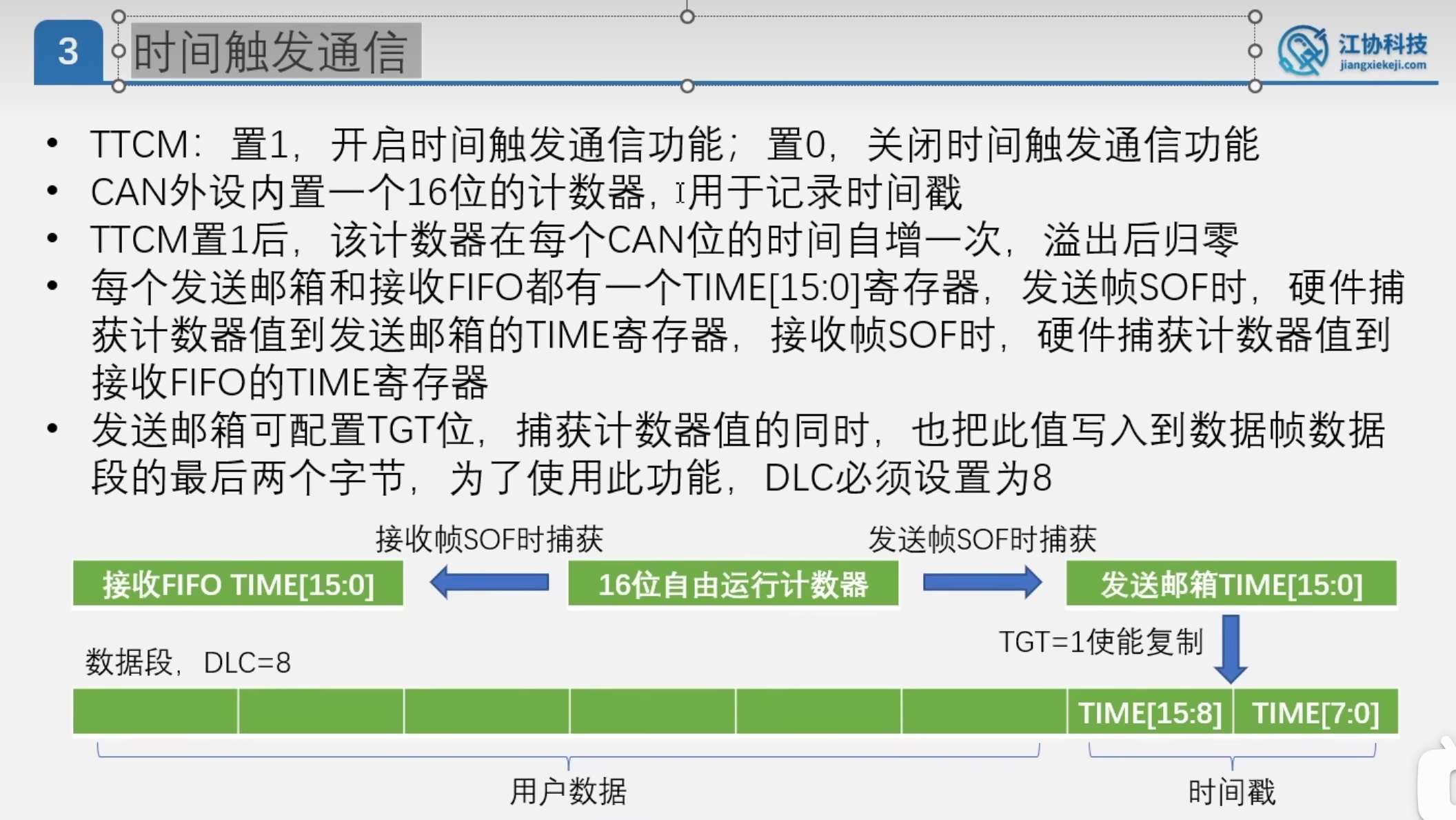
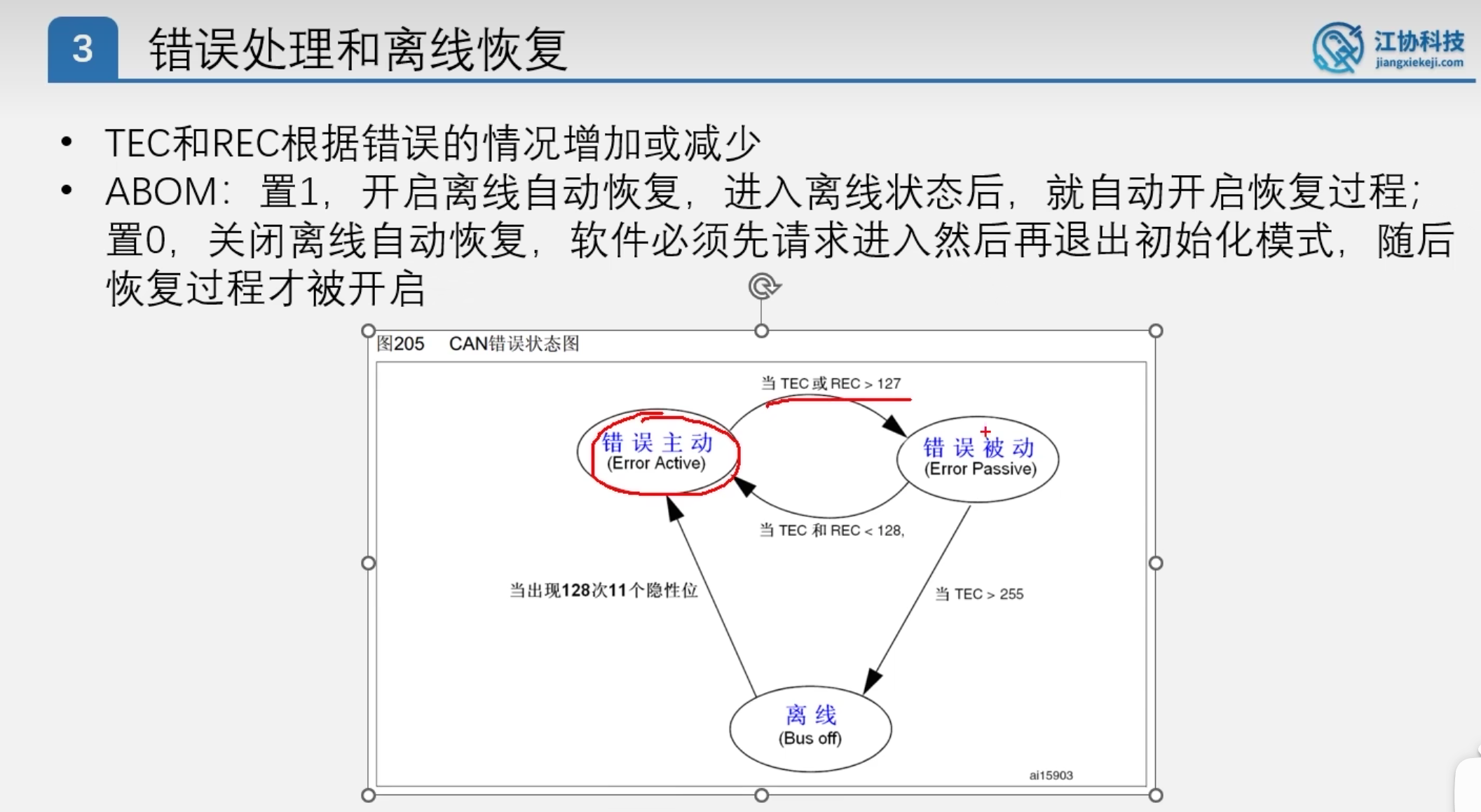
1、STM32中CAN总线的外设简介 2、CAN网拓扑结构 2.1、CAN收发器电路 2.2、CAN基本结构 2.3、发送过程 2.4、接收过程 2.5、发送和接收配置位 2.6、标识符过滤器 2.7、过滤器配置示例 2.8、测试模式 2.9、工作模式 2.10、位时间特性 2.11、中断 2.12、时间触发通信 2.13、错误处理和离线恢复