AUTOSAR CP——Can模块
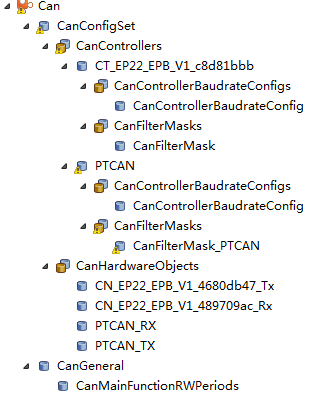
Can模块的主要配置信息
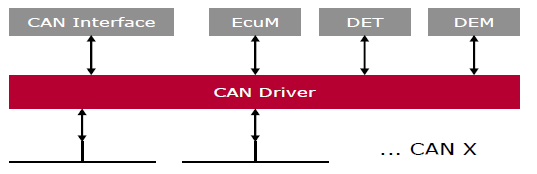
其他相关模块
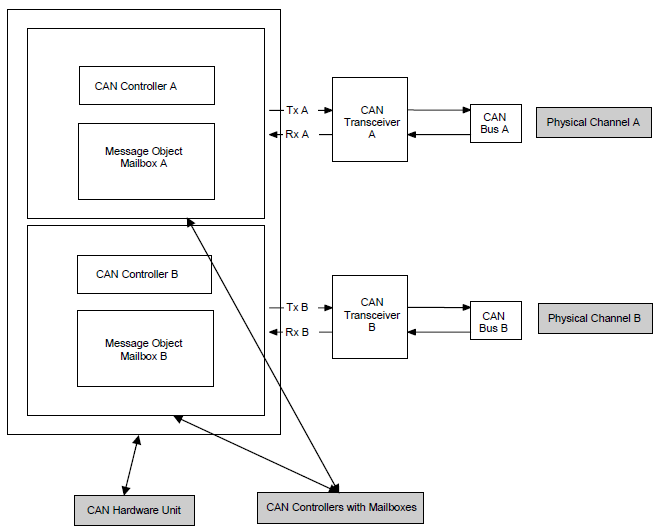
通讯框图
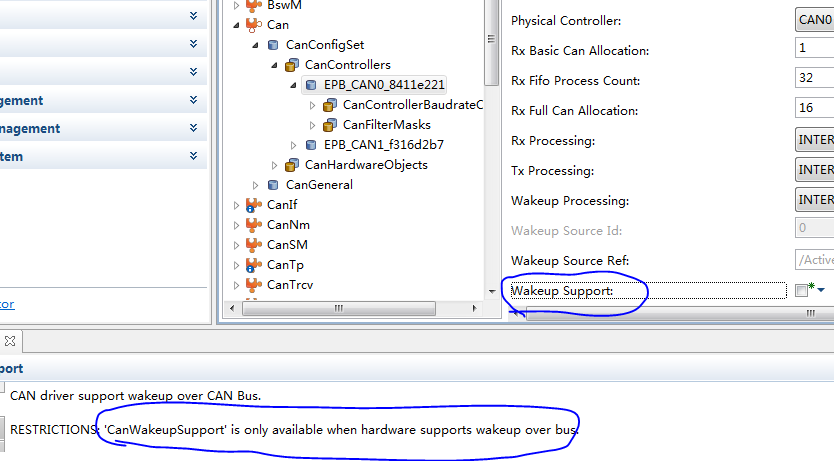
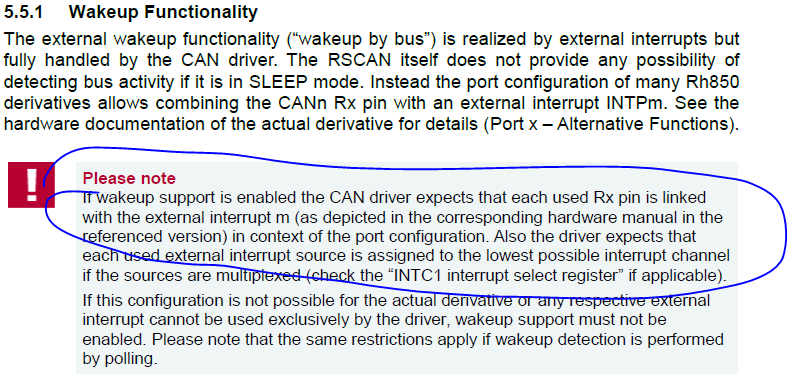
Can网络唤醒配置:当硬件支持的时候,可以通过Bus唤醒,见《TechnicalReference_Can_ Rscan》 P30 _5.5.1 Wakeup Functionality:RH850芯片时,在不使用SBC时,当Rx脚连接到某个外部中断源的时候才可用;若使用SBC则可通过Can收发器唤醒SBC,SBC使能主芯片供电,实现网络唤醒。
总结:
Can:主要是配置CAN Driver相关的信息,即和硬件驱动有关的。包括在MCU上用的是哪条通道、波特率是多少、预分频、Seg的值、Fifo及Buffer的值、配置一些接收、发送Channel以及接收Mask等等。主要就是和Can相关的寄存器的设置。
CAN控制器是实现CAN总线的协议底层和数据链路层,生成完整CAN帧,并以二进制码流发送到CAN收发器,使用的所有操作都是在CAN控制器中实现的,如:帧ID、帧数据、帧格式、帧类型等参数成帧处理、CRC校验、应答检测、硬件过滤等。这部分的配置在Can模块中。