RK3566 Android12 HG24C02MM/TR EEPROM适配
一、背景
近期项目中,有一个需求,要使用RK3566 Android12平台适配一款HG24C02MM/TR EEPROM芯片,通过i2c实现主板与EEPROM芯片的数据通讯。废话不多说,来看资料。
二、芯片资料
HG24C02 / HG24C04 / HG24C08 / HG24C16是提供2048/4096/8192/16384位串行电可擦除和可编程只读存储器(EEPROM),组织为256/512/1024/2048个8位字。该设备经过优化,适用于许多工业和商业应用,其中低功耗和低电压操作是必不可少的。HG24C02 / HG24C04 / HG24C08 / HG24C16有节省空间的8引脚DIP, 8引脚SOP, 8引脚MSOP, 5引脚SOT23封装,通过两线串行接口接入。翻译不太准确,直接看原文:
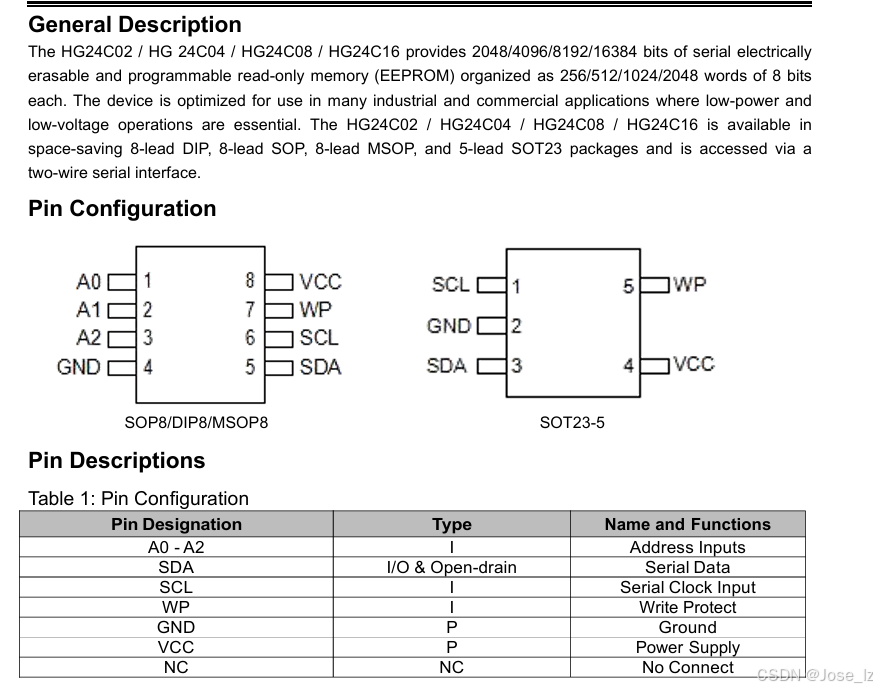
简单讲,在下使用的这款芯片为2Kbit(256x8)的串行EEPROM,采用I2C接口通信。要通过I2C做通讯,该芯片采用SDA引脚实现双向的数据传输,SCK作为I2C的时钟输入。。。表格如下:
| 引脚号 | 引脚名称 | 功能描述 |
|---|---|---|
| 1 | A0 | 设备地址输入位 0(可硬件配置,用于多设备区分) |
| 2 | A1 | 设备地址输入位 1(可硬件配置,用于多设备区分) |
| 3 | A2 | 设备地址输入位 2(可硬件配置,用于多设备区分) |
| 4 | GND | 地(GND)(电源负极,0V参考) |
| 5 | SDA | 串行数据线(双向数据传输,开漏输出,需上拉电阻) |
| 6 | SCL | 串行时钟线(I²C 时钟输入,上升沿采样数据) |
| 7 | WP | 写保护(高电平禁止写入,低电平允许写入) |
| 8 | VCC | 电源正极(典型电压:1.7V~5.5V) |
这里值得留意的是A0、A1、A2这三个引脚,通过查看硬件的配置,设定其电平高低为0还是1,以便于区分多个设备,比如在下的项目就采用两个HG24C02芯片,那么就得做区分处理,让软件能够识别到不同的芯片,这点下文细谈。
在下在开发过程中真正采用到的信息资料也就上述内容,其余的有兴趣可从datasheet规格书中了解。
三、硬件接线
鉴于保密需求,该方面不作展示。
四、软件调试
1、DTS配置
首先得先搞懂EEPROM的IIC设备地址是哪个,如同前面提到过的,这里我们要去看硬件上A0、A1、A2引脚的接线。在下的电平配置分别是:
第一个HG24C02芯片为A0=0,A1=0,A2=1
第二个HG24C02芯片为A0=0,A1=1,A2=1
这里呢我们看到芯片规格书中的下图所示
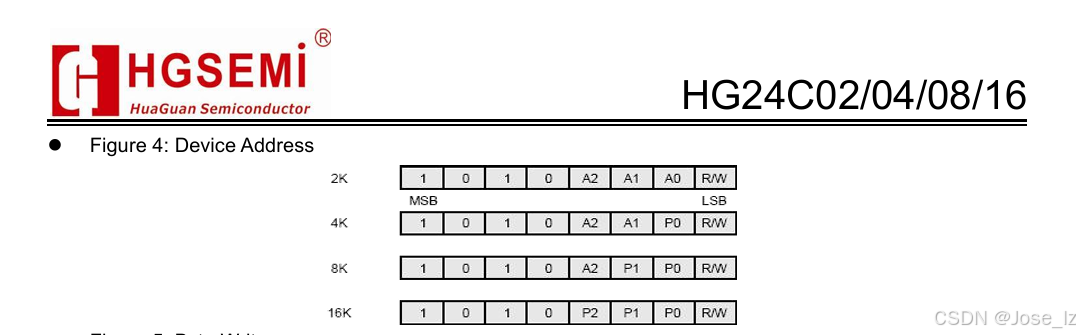
可以得知在下使用的芯片设备地址常规配列为:
1 0 1 0 A2 A1 A0 R/W
通常R/W位值默认是0,那么,
第一个芯片的地址的二进制序列为
10101000
右移一位,得到
01010100
化为16进制,得到的值即为该芯片的I2C设备地址:
0x54
同理,第二个芯片的地址的二进制序列为
10101100
右移一位,得到
01010110
转换16进制,得到第二个芯片的I2C设备地址:
0x56
那么dts中配置如下:
&i2c3 {status = "okay";pinctrl-names = "default";pinctrl-0 = <&i2c3m1_xfer>; eeprom@54{compatible = "atmel,24c02";reg = <0x54>;// pagesize = <8>;status = "okay";};};&i2c5 {status = "okay";pinctrl-names = "default";pinctrl-0 = <&i2c5m0_xfer>;eeprom@56{compatible = "atmel,24c02";reg = <0x56>;// pagesize = <8>;status = "okay";};
};其中,驱动部分我们使用at24c02的驱动,因为HG24C02和AT24C02在硬件接口、通信协议以及功能逻辑上完全兼容,属于同类型的I2C EEPROM存储设备。该驱动在RK的SDK中已经适配,我们直接调用即可。
通过查看对应驱动的Makefile文件和Kconfig文件可知,我们需同步打开配置如下:
CONFIG_EEPROM_AT24=y2、调试测试
接下来,编译烧录系统,我们用命令查看i2c3和i2c5上的设备:
rk3566:/ # i2cdetect -y 30 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- UU -- -- -- -- -- -- -- 5c -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --rk3566:/ # i2cdetect -y 50 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- UU -- -- -- -- -- -- -- 5e --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --可以知道,我们在0x54和0x56上的两个i2c设备的内核驱动已经成功加载,当然,这里也可以通过log查看驱动加载的流程。接下来,我们查看生成的EEPROM节点,以I2C5为例,如下
rk3566:/ # cd /sys/bus/i2c/devices/5-0056/
rk3566:/sys/bus/i2c/devices/5-0056 # ls
5-00560 driver eeprom modalias name of_node power subsystem uevent
rk3566:/sys/bus/i2c/devices/5-0056 # echo "Hello World" > eeprom
rk3566:/sys/bus/i2c/devices/5-0056 # cat eeprom
Hello World
er eeprom modalias name of_node power subsystem uevent
5-26 09:00:44/sys/bus/i2c/devices/5-0056/eeprom����������������������������������������������������������������������������������������������������������������������������������������������
rk3566:/sys/bus/i2c/devices/5-0056 #成功加载驱动的话,会生成有一个EEPROM节点,通过echo命令往里面写值,可以看到,cat命令后能输出我们先前输入进去的内容"Hallow World"。到这里,我们基本上打通了这个HG24C02芯片的底层配置。为了方便后续Android系统服务(比如hal或vendor进程)访问这些EEPROM设备,我们再把它们的权限组修改,如下配置:
Index: device/rockchip/rk356x/init.rk356x.rc
===================================================================
--- device/rockchip/rk356x/init.rk356x.rc (revision 6666)
+++ device/rockchip/rk356x/init.rk356x.rc (revision 6667)
@@ -44,6 +44,12 @@
on boot...... # reduce schedul time to improve io performancewrite /sys/kernel/debug/sched_features NO_ENERGY_AWARE
+
+ chown system system /sys/bus/i2c/devices/3-0054/eeprom
+ chmod 0660 /sys/bus/i2c/devices/3-0054/eeprom
+
+ chown system system /sys/bus/i2c/devices/5-0056/eeprom
+ chmod 0660 /sys/bus/i2c/devices/5-0056/eepromon init# Increased power consumption and CPU in exchange for memory至此,完成整个开发流程。
五、参考资料
1、RK3568-适配at24c04模块_rk3568 i2c地址范围-CSDN博客![]() https://blog.csdn.net/qq_42952079/article/details/134054118
https://blog.csdn.net/qq_42952079/article/details/134054118
2、RK3566调试eeprom_内核配置eeprom-CSDN博客![]() https://blog.csdn.net/professionalmcu/article/details/126934556
https://blog.csdn.net/professionalmcu/article/details/126934556
3、24C02原理图设计+管脚配置+管脚描述_24c02引脚图原理图-CSDN博客![]() https://blog.csdn.net/XL__MAX/article/details/87913634
https://blog.csdn.net/XL__MAX/article/details/87913634
4、AT24C02 E2PROM芯片详解_24c02地址-CSDN博客![]() https://blog.csdn.net/as480133937/article/details/105472659
https://blog.csdn.net/as480133937/article/details/105472659
5、24C02 EEPROM详解-CSDN博客![]() https://blog.csdn.net/qq_45386946/article/details/108182813
https://blog.csdn.net/qq_45386946/article/details/108182813