Ros 发布者 有关publisher的编程实现
基于上一次 建立工作空间的文章
1.我们首先就是建立一个新的功能包 把上次那个删了就行。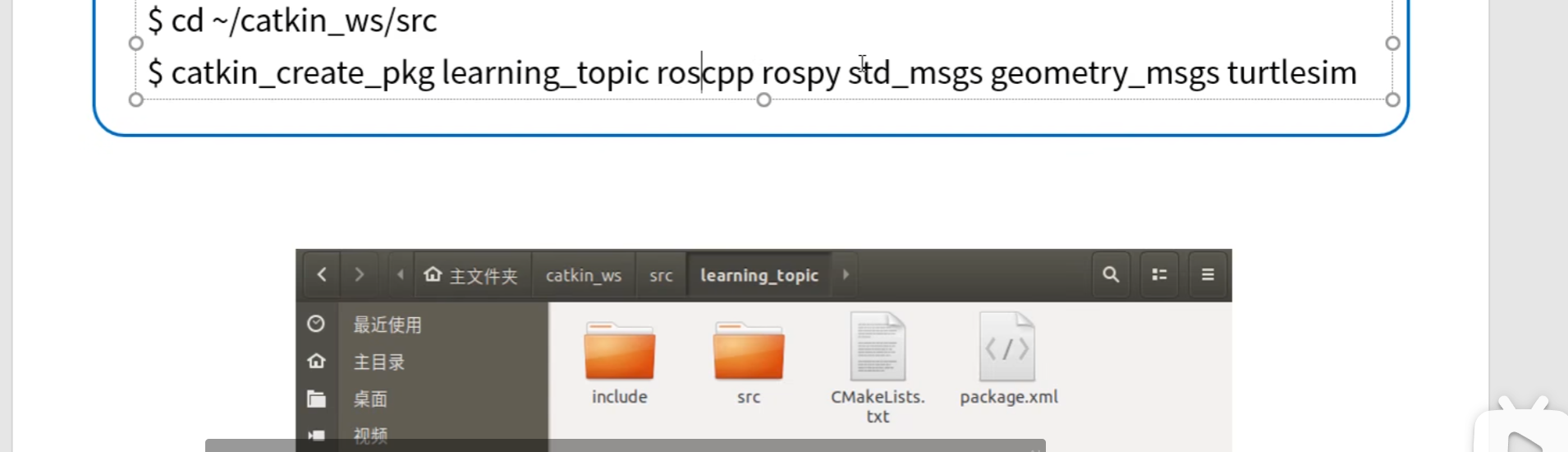
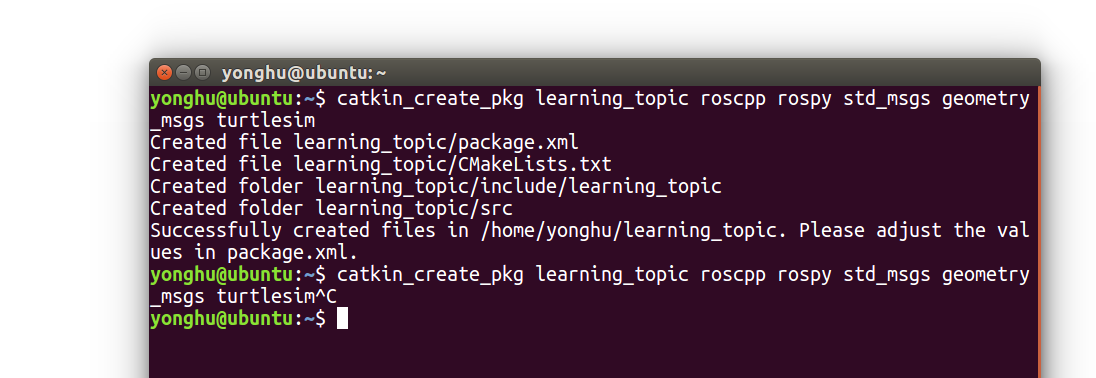
后面就是包含 Ros基本信息 几何 和乌龟仿真之类的依赖包
--------------------------------------------------------
行了老铁们 我们建立了我们的功能包 后 ,在这个learning topic的功能包下 的src里导入我们的程序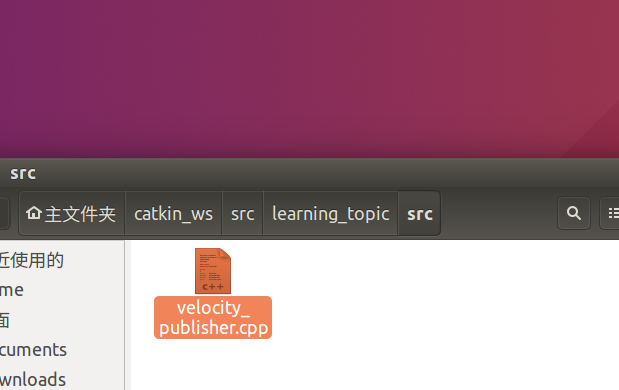
--------
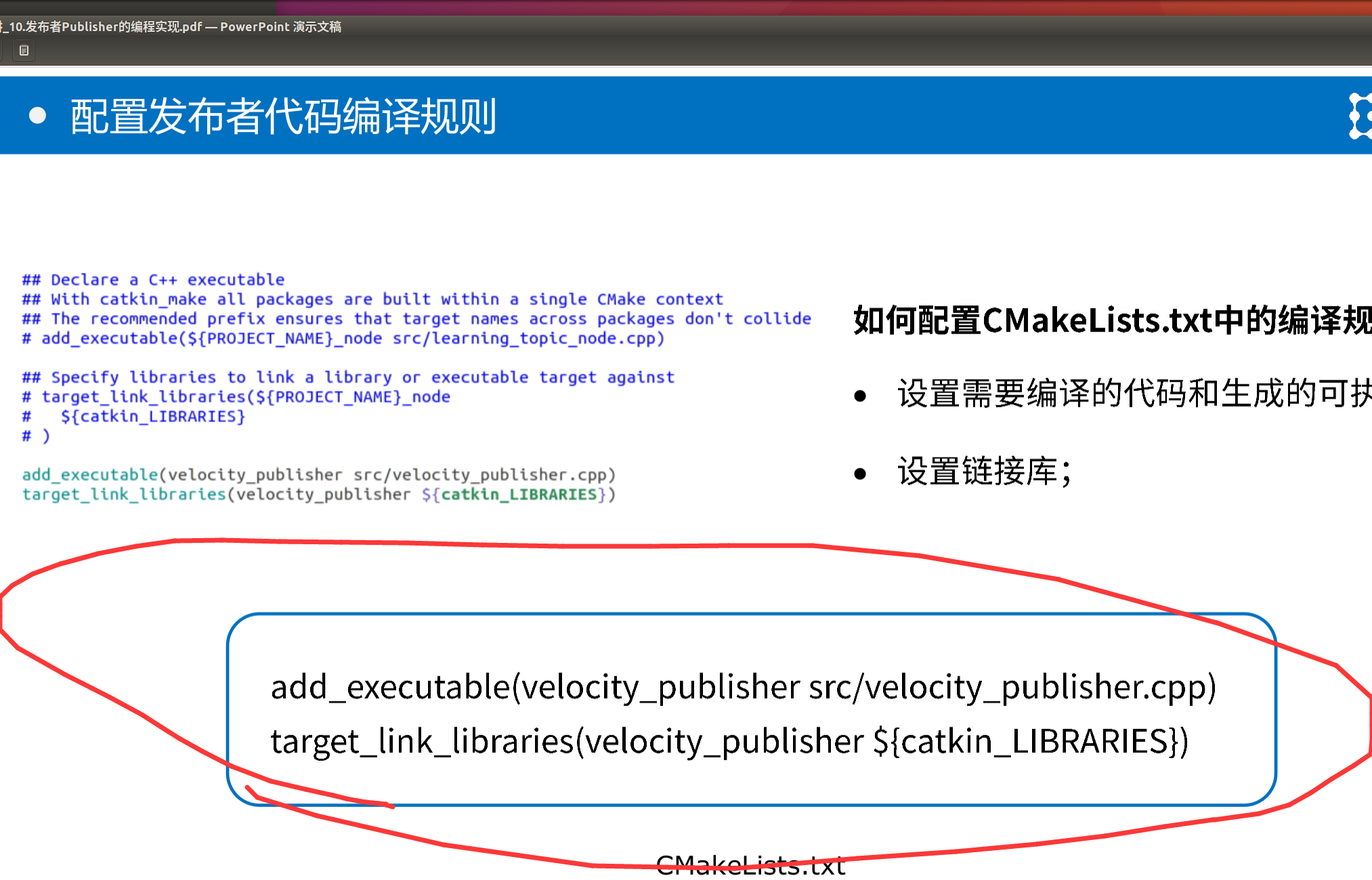
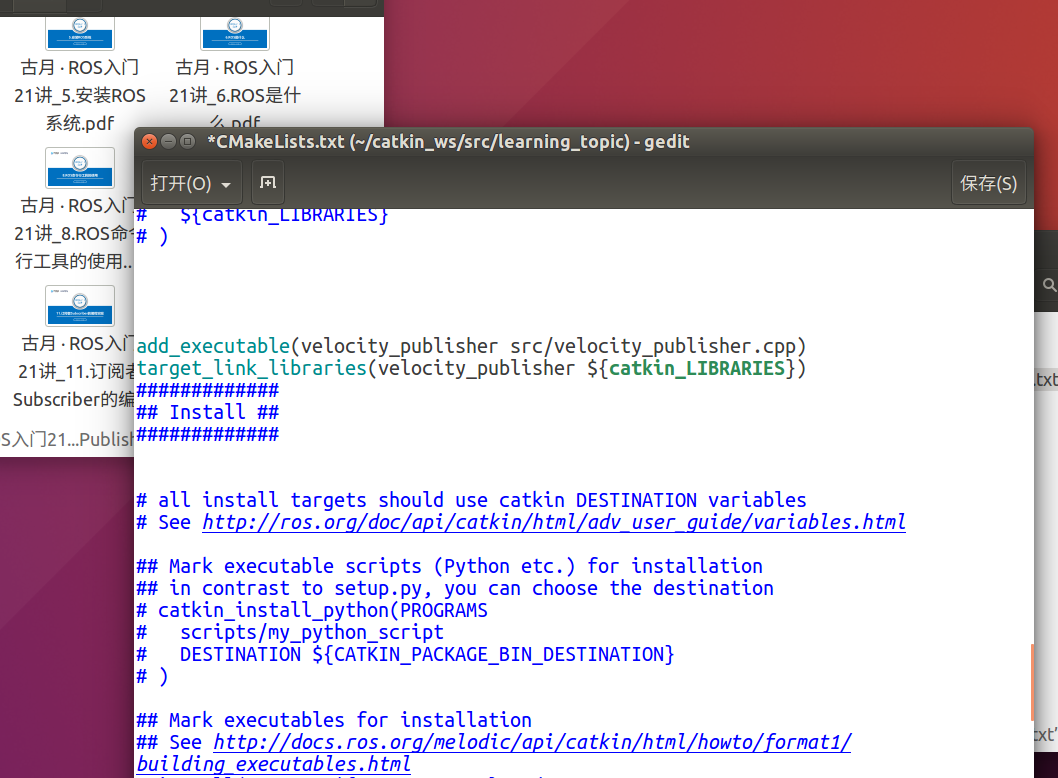
将这两段话放入到camke_list 那个txt文件 也就是我们上个文章里说的 两个的其中一个,放入到对应的位置
大概为157行的位置。
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
——————————
ok我们整体弄好了 对应的代码以及 引入两行代码
我们就可以回归 大工作空间进行catkin_make
对应环境变量 可以在我们主文件夹大文件下 ctrl h进行找到这个隐藏文件夹 最后一行放入 然后就不用了。
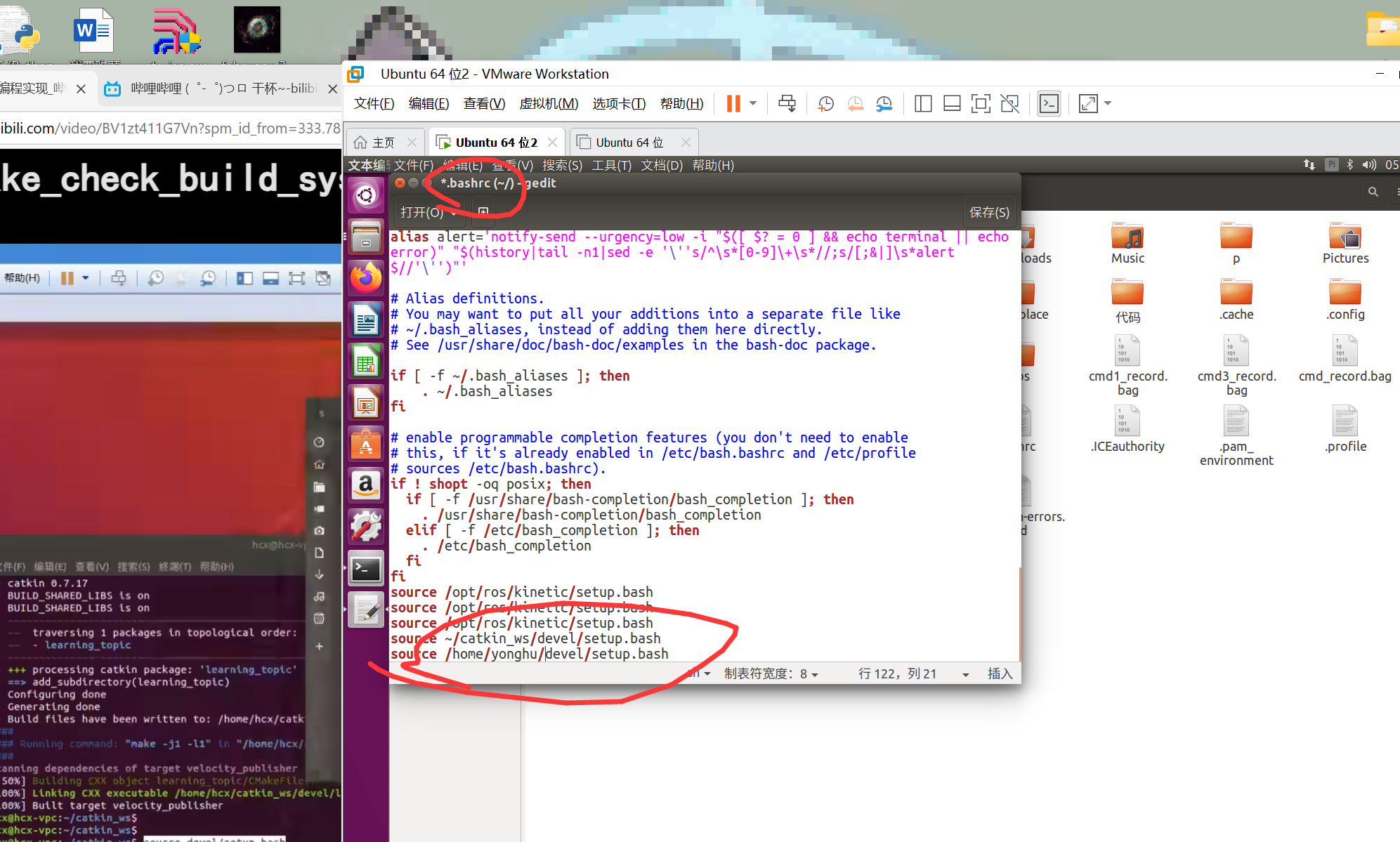
改完那种文件 要从新catkin_make
最后开启
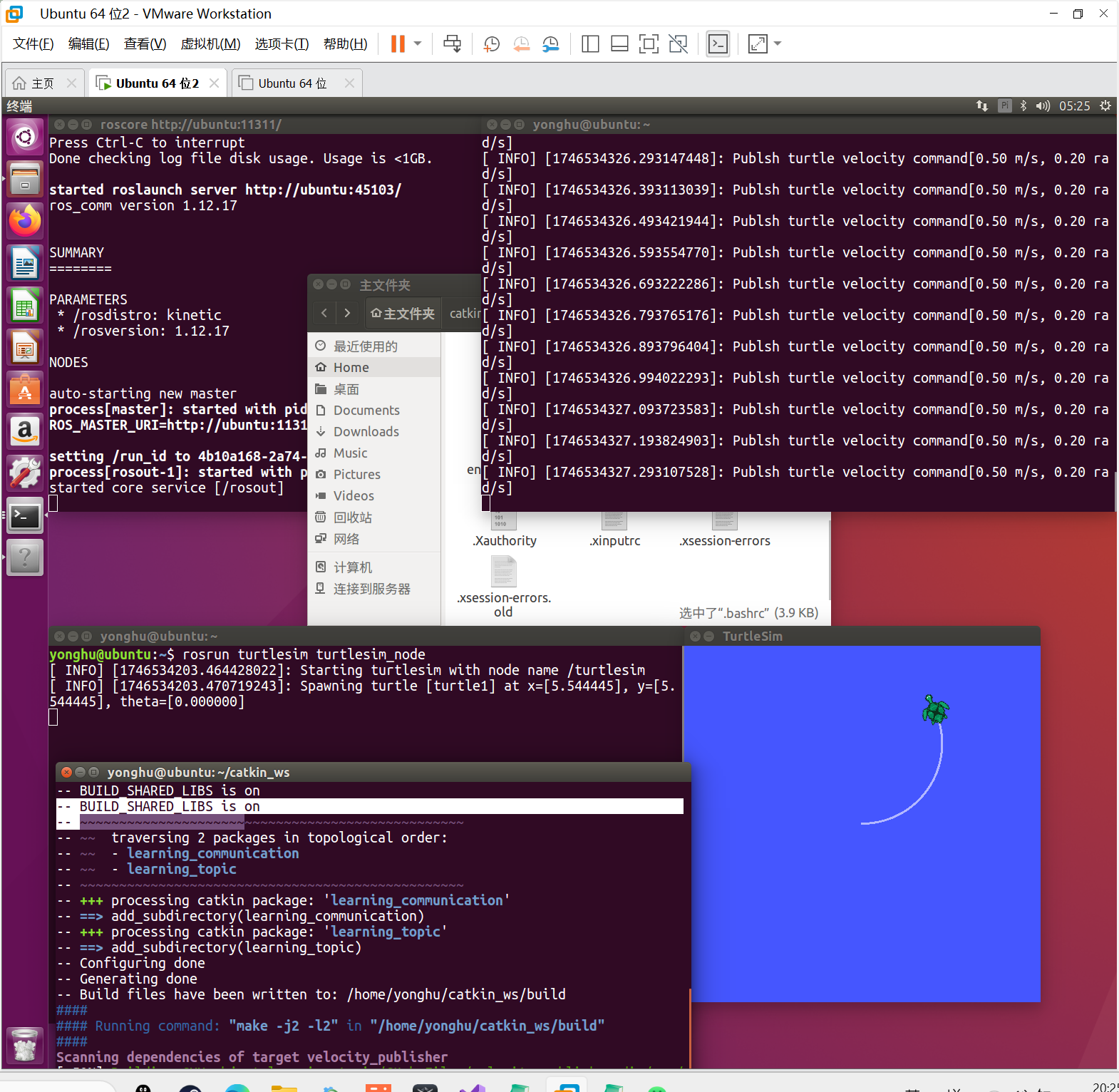
对应自己打开roscore node. 然后rosrun learning_topic 名字 然后他就自己开开了。