PPO 算法
1. 简介
TRPO 算法的改进版——PPO 算法在 2017 年被提出,PPO 基于 TRPO 的思想,但是其算法实现更加简单。并且大量的实验结果表明,与 TRPO 相比,PPO 能学习得一样好(甚至更快),这使得 PPO 成为非常流行的强化学习算法。如果我们想要尝试在一个新的环境中使用强化学习算法,那么 PPO 就属于可以首先尝试的算法。
回忆一下 TRPO 的优化目标:
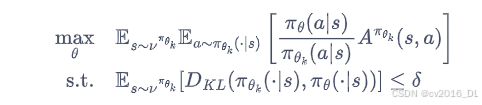
TRPO 使用泰勒展开近似、共轭梯度、线性搜索等方法直接求解。PPO 的优化目标与 TRPO 相同,但 PPO 用了一些相对简单的方法来求解。具体来说,PPO 有两种形式,一是 PPO-惩罚,二是 PPO-截断,我们接下来对这两种形式进行介绍。
2.PPO-惩罚
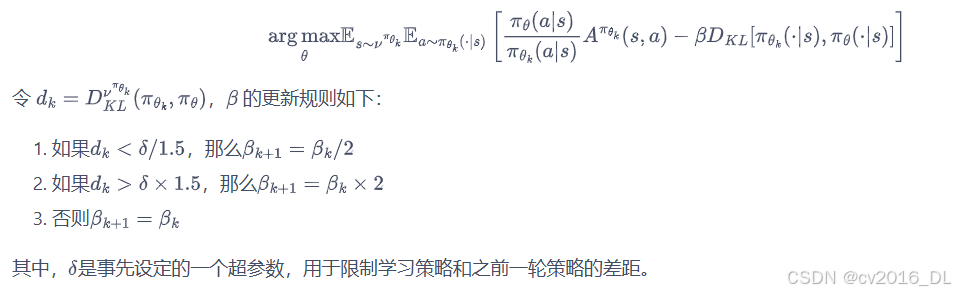
PPO-惩罚(PPO-Penalty)用拉格朗日乘数法直接将 KL 散度的限制放进了目标函数中,这就变成了一个无约束的优化问题,在迭代的过程中不断更新 KL 散度前的系数。即:
3.PPO-截断
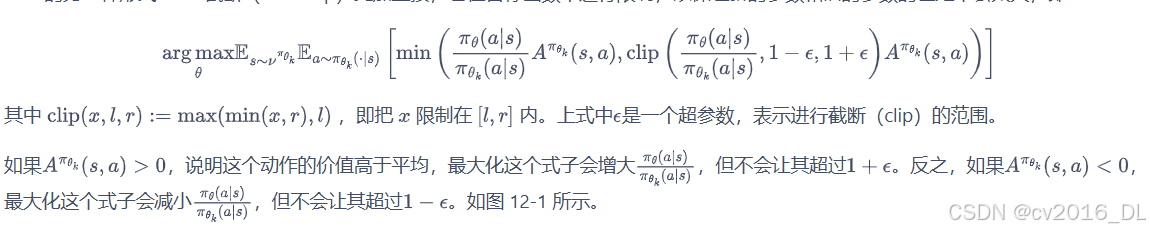
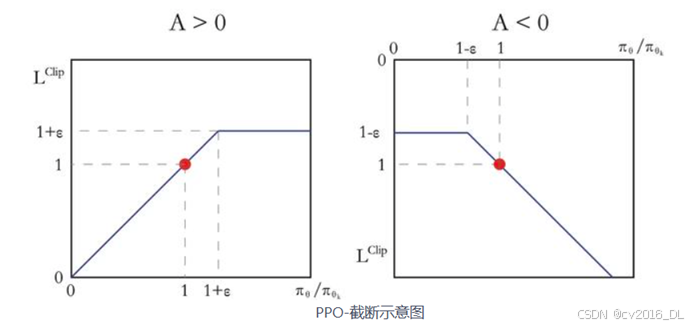
PPO 的另一种形式 PPO-截断(PPO-Clip)更加直接,它在目标函数中进行限制,以保证新的参数和旧的参数的差距不会太大,即:
4.PPO 代码实践
与 TRPO 相同,我们仍然在车杆和倒立摆两个环境中测试 PPO 算法。大量实验表明,PPO-截断总是比 PPO-惩罚表现得更好。因此下面我们专注于 PPO-截断的代码实现。
首先导入一些必要的库,并定义策略网络和价值网络。
import gym
import torch
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
import rl_utilsclass PolicyNet(torch.nn.Module):def __init__(self, state_dim, hidden_dim, action_dim):super(PolicyNet, self).__init__()self.fc1 = torch.nn.Linear(state_dim, hidden_dim)self.fc2 = torch.nn.Linear(hidden_dim, action_dim)def forward(self, x):x = F.relu(self.fc1(x))return F.softmax(self.fc2(x), dim=1)class ValueNet(torch.nn.Module):def __init__(self, state_dim, hidden_dim):super(ValueNet, self).__init__()self.fc1 = torch.nn.Linear(state_dim, hidden_dim)self.fc2 = torch.nn.Linear(hidden_dim, 1)def forward(self, x):x = F.relu(self.fc1(x))return self.fc2(x)class PPO:''' PPO算法,采用截断方式 '''def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr,lmbda, epochs, eps, gamma, device):self.actor = PolicyNet(state_dim, hidden_dim, action_dim).to(device)self.critic = ValueNet(state_dim, hidden_dim).to(device)self.actor_optimizer = torch.optim.Adam(self.actor.parameters(),lr=actor_lr)self.critic_optimizer = torch.optim.Adam(self.critic.parameters(),lr=critic_lr)self.gamma = gammaself.lmbda = lmbdaself.epochs = epochs # 一条序列的数据用来训练轮数self.eps = eps # PPO中截断范围的参数self.device = devicedef take_action(self, state):state = torch.tensor([state], dtype=torch.float).to(self.device)probs = self.actor(state)action_dist = torch.distributions.Categorical(probs)action = action_dist.sample()return action.item()def update(self, transition_dict):states = torch.tensor(transition_dict['states'],dtype=torch.float).to(self.device)actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(self.device)rewards = torch.tensor(transition_dict['rewards'],dtype=torch.float).view(-1, 1).to(self.device)next_states = torch.tensor(transition_dict['next_states'],dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'],dtype=torch.float).view(-1, 1).to(self.device)td_target = rewards + self.gamma * self.critic(next_states) * (1 -dones)td_delta = td_target - self.critic(states)advantage = rl_utils.compute_advantage(self.gamma, self.lmbda,td_delta.cpu()).to(self.device)old_log_probs = torch.log(self.actor(states).gather(1,actions)).detach()for _ in range(self.epochs):log_probs = torch.log(self.actor(states).gather(1, actions))ratio = torch.exp(log_probs - old_log_probs)surr1 = ratio * advantagesurr2 = torch.clamp(ratio, 1 - self.eps,1 + self.eps) * advantage # 截断actor_loss = torch.mean(-torch.min(surr1, surr2)) # PPO损失函数critic_loss = torch.mean(F.mse_loss(self.critic(states), td_target.detach()))self.actor_optimizer.zero_grad()self.critic_optimizer.zero_grad()actor_loss.backward()critic_loss.backward()self.actor_optimizer.step()self.critic_optimizer.step()接下来在车杆环境中训练 PPO 算法。
actor_lr = 1e-3
critic_lr = 1e-2
num_episodes = 500
hidden_dim = 128
gamma = 0.98
lmbda = 0.95
epochs = 10
eps = 0.2
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")env_name = 'CartPole-v0'
env = gym.make(env_name)
env.seed(0)
torch.manual_seed(0)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = PPO(state_dim, hidden_dim, action_dim, actor_lr, critic_lr, lmbda,epochs, eps, gamma, device)return_list = rl_utils.train_on_policy_agent(env, agent, num_episodes)
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('PPO on {}'.format(env_name))
plt.show()mv_return = rl_utils.moving_average(return_list, 9)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('PPO on {}'.format(env_name))
plt.show() 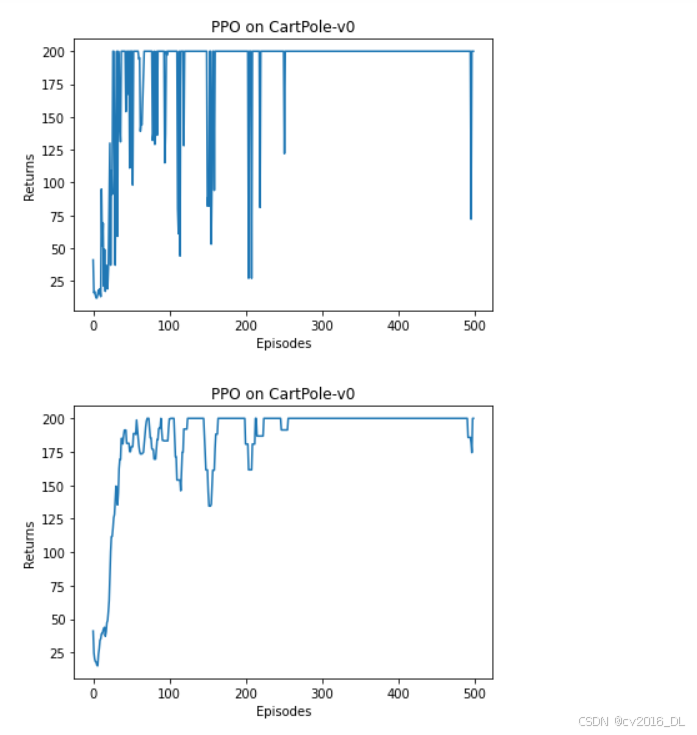
倒立摆是与连续动作交互的环境,同 TRPO 算法一样,我们做一些修改,让策略网络输出连续动作高斯分布(Gaussian distribution)的均值和标准差。后续的连续动作则在该高斯分布中采样得到。
class PolicyNetContinuous(torch.nn.Module):def __init__(self, state_dim, hidden_dim, action_dim):super(PolicyNetContinuous, self).__init__()self.fc1 = torch.nn.Linear(state_dim, hidden_dim)self.fc_mu = torch.nn.Linear(hidden_dim, action_dim)self.fc_std = torch.nn.Linear(hidden_dim, action_dim)def forward(self, x):x = F.relu(self.fc1(x))mu = 2.0 * torch.tanh(self.fc_mu(x))std = F.softplus(self.fc_std(x))return mu, stdclass PPOContinuous:''' 处理连续动作的PPO算法 '''def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr,lmbda, epochs, eps, gamma, device):self.actor = PolicyNetContinuous(state_dim, hidden_dim,action_dim).to(device)self.critic = ValueNet(state_dim, hidden_dim).to(device)self.actor_optimizer = torch.optim.Adam(self.actor.parameters(),lr=actor_lr)self.critic_optimizer = torch.optim.Adam(self.critic.parameters(),lr=critic_lr)self.gamma = gammaself.lmbda = lmbdaself.epochs = epochsself.eps = epsself.device = devicedef take_action(self, state):state = torch.tensor([state], dtype=torch.float).to(self.device)mu, sigma = self.actor(state)action_dist = torch.distributions.Normal(mu, sigma)action = action_dist.sample()return [action.item()]def update(self, transition_dict):states = torch.tensor(transition_dict['states'],dtype=torch.float).to(self.device)actions = torch.tensor(transition_dict['actions'],dtype=torch.float).view(-1, 1).to(self.device)rewards = torch.tensor(transition_dict['rewards'],dtype=torch.float).view(-1, 1).to(self.device)next_states = torch.tensor(transition_dict['next_states'],dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'],dtype=torch.float).view(-1, 1).to(self.device)rewards = (rewards + 8.0) / 8.0 # 和TRPO一样,对奖励进行修改,方便训练td_target = rewards + self.gamma * self.critic(next_states) * (1 -dones)td_delta = td_target - self.critic(states)advantage = rl_utils.compute_advantage(self.gamma, self.lmbda,td_delta.cpu()).to(self.device)mu, std = self.actor(states)action_dists = torch.distributions.Normal(mu.detach(), std.detach())# 动作是正态分布old_log_probs = action_dists.log_prob(actions)for _ in range(self.epochs):mu, std = self.actor(states)action_dists = torch.distributions.Normal(mu, std)log_probs = action_dists.log_prob(actions)ratio = torch.exp(log_probs - old_log_probs)surr1 = ratio * advantagesurr2 = torch.clamp(ratio, 1 - self.eps, 1 + self.eps) * advantageactor_loss = torch.mean(-torch.min(surr1, surr2))critic_loss = torch.mean(F.mse_loss(self.critic(states), td_target.detach()))self.actor_optimizer.zero_grad()self.critic_optimizer.zero_grad()actor_loss.backward()critic_loss.backward()self.actor_optimizer.step()self.critic_optimizer.step() 创建环境Pendulum-v0,并设定随机数种子以便重复实现。接下来我们在倒立摆环境中训练 PPO 算法。
actor_lr = 1e-4
critic_lr = 5e-3
num_episodes = 2000
hidden_dim = 128
gamma = 0.9
lmbda = 0.9
epochs = 10
eps = 0.2
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")env_name = 'Pendulum-v0'
env = gym.make(env_name)
env.seed(0)
torch.manual_seed(0)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.shape[0] # 连续动作空间
agent = PPOContinuous(state_dim, hidden_dim, action_dim, actor_lr, critic_lr,lmbda, epochs, eps, gamma, device)return_list = rl_utils.train_on_policy_agent(env, agent, num_episodes)
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('PPO on {}'.format(env_name))
plt.show()mv_return = rl_utils.moving_average(return_list, 21)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('PPO on {}'.format(env_name))
plt.show() 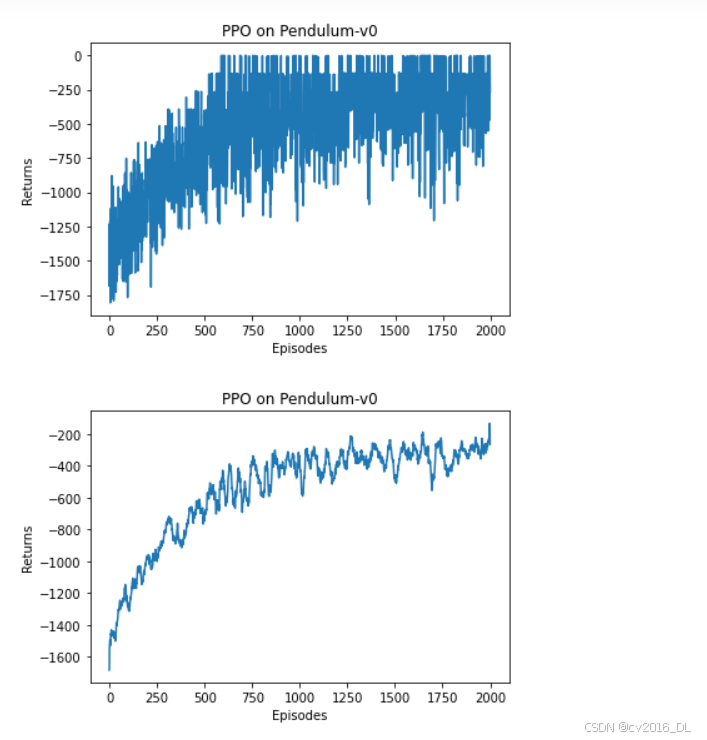
5.总结
PPO 是 TRPO 的一种改进算法,它在实现上简化了 TRPO 中的复杂计算,并且它在实验中的性能大多数情况下会比 TRPO 更好,因此目前常被用作一种常用的基准算法。需要注意的是,TRPO 和 PPO 都属于在线策略学习算法,即使优化目标中包含重要性采样的过程,但其只是用到了上一轮策略的数据,而不是过去所有策略的数据。
PPO 是 TRPO 的第一作者 John Schulman 从加州大学伯克利分校博士毕业后在 OpenAI 公司研究出来的。通过对 TRPO 计算方式的改进,PPO 成为了最受关注的深度强化学习算法之一,并且其论文的引用量也超越了 TRPO。
6 参考文献
[1] SCHULMAN J, FILIP W, DHARIWAL P, et al. Proximal policy optimization algorithms [J]. Machine Learning, 2017.