L39.【LeetCode题解】面试题 01.07. 旋转矩阵(四种方法)
目录
1.题目
2.分析
方法1:先转置再按每行反向存储
代码
提交结果
方法2:原矩阵从下往上遍历,新矩阵从左向右尾插
代码
提交结果
编辑
方法3:按行翻转后再将矩阵对称
代码
提交结果
按行翻转的其他做法
代码
提交结果
方法4:使用旋转向量辅助解决
数学推导
代码
准备代码
完整代码
精简版代码(从上方代码化简而来)
提交结果
1.题目
https://leetcode.cn/problems/rotate-matrix-lcci/description/
给你一幅由
N × N矩阵表示的图像,其中每个像素的大小为 4 字节。请你设计一种算法,将图像旋转 90 度。不占用额外内存空间能否做到?
示例 1:
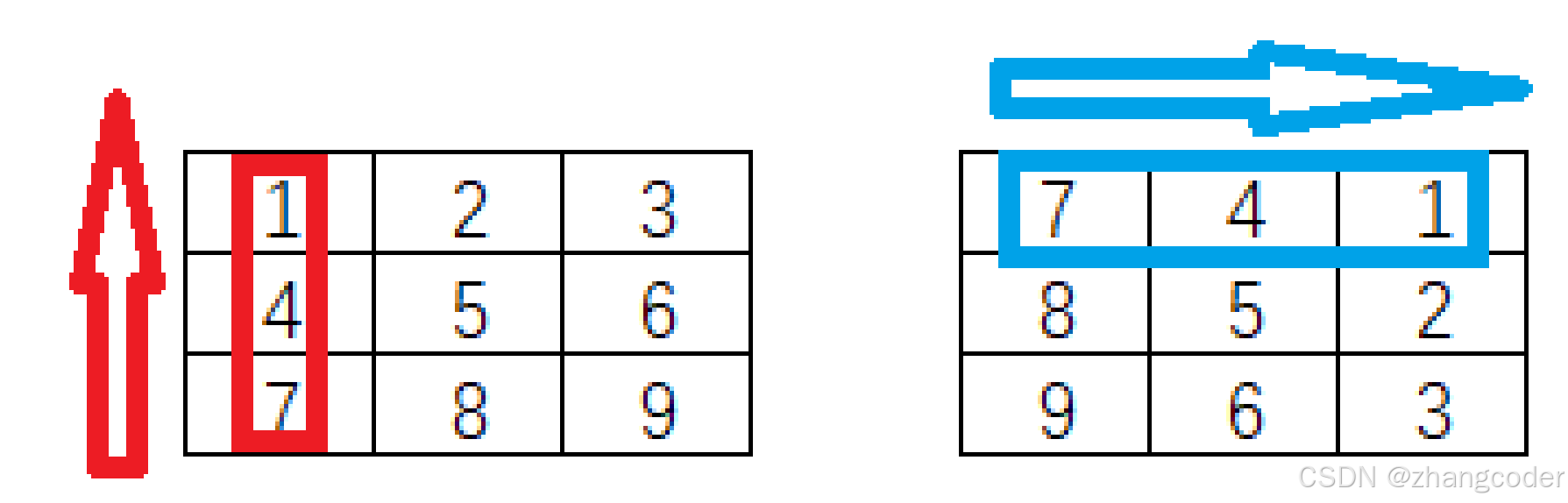
给定 matrix = [[1,2,3],[4,5,6],[7,8,9] ],原地旋转输入矩阵,使其变为: [[7,4,1],[8,5,2],[9,6,3] ]示例 2:
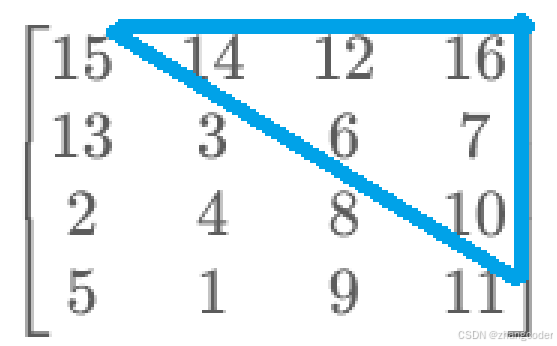
给定 matrix = [[ 5, 1, 9,11],[ 2, 4, 8,10],[13, 3, 6, 7],[15,14,12,16] ], 原地旋转输入矩阵,使其变为: [[15,13, 2, 5],[14, 3, 4, 1],[12, 6, 8, 9],[16, 7,10,11] ]注意:本题与主站 48 题相同:48. 旋转图像 - 力扣(LeetCode)
2.分析
方法1:先转置再按每行反向存储
先转置再按每行反向存储

代码
class Solution {
public:void rotate(vector<vector<int>>& matrix)//非转置矩阵{int N=matrix.size();vector<vector<int>> matrix1,matrix2;for (int col=0;col<N;col++)//先转置{vector<int> line;for (int row=0;row<N;row++){line.push_back(matrix[row][col]);}matrix1.push_back(line);}for (int row=0;row<N;row++)//反向存储{vector<int> line;for (int col=N-1;col>=0;col--){line.push_back(matrix1[row][col]);}matrix2.push_back(line);}matrix=matrix2;}
};时间复杂度: (若精确计算,为
)
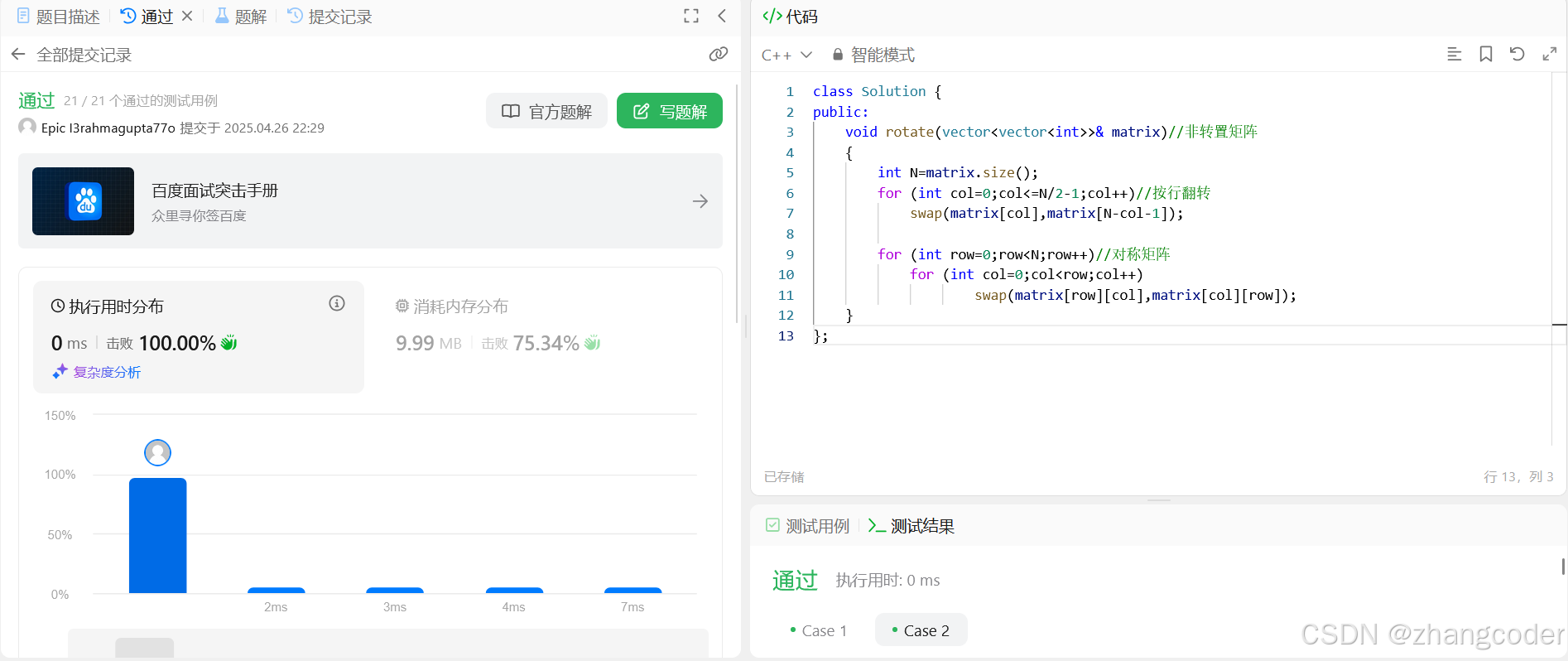
提交结果
方法2:原矩阵从下往上遍历,新矩阵从左向右尾插
代码
class Solution {
public:void rotate(vector<vector<int>>& matrix)//非转置矩阵{int N=matrix.size();vector<vector<int>> tmp;for (int col=0;col<N;col++)//先转置{vector<int> line;for (int row=N-1;row>=0;row--){line.push_back(matrix[row][col]);}tmp.push_back(line);}matrix=tmp;}
};时间复杂度:
提交结果
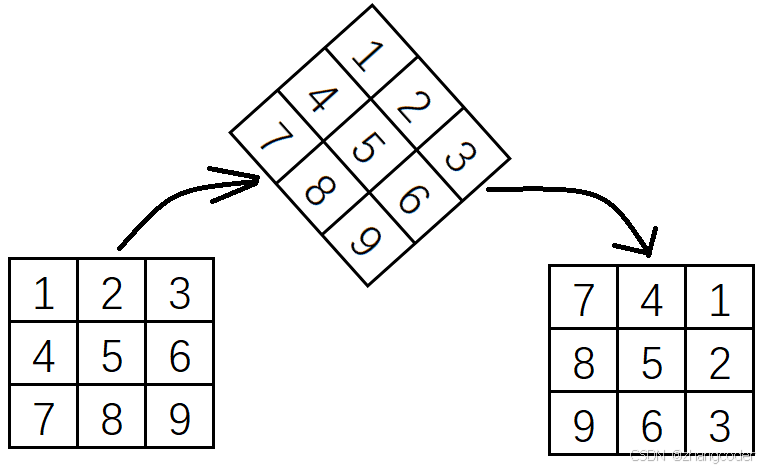
方法3:按行翻转后再将矩阵对称
直接引用LeetCode官方的分析图:
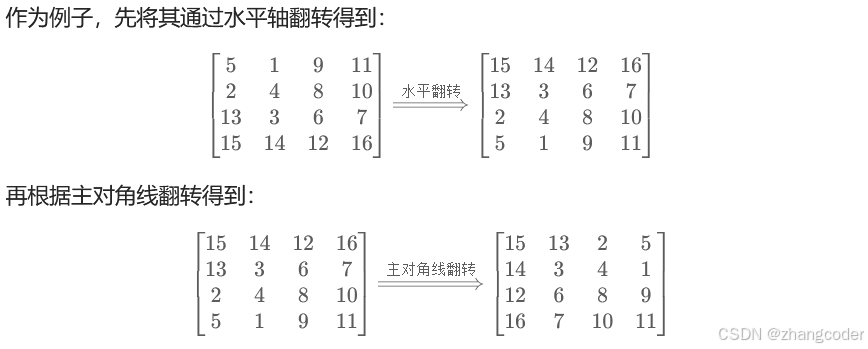
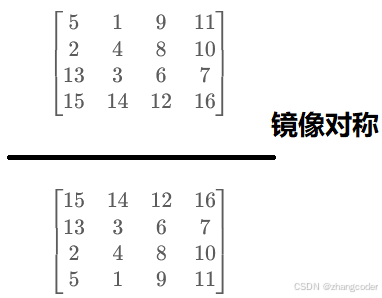
注:这个水平翻转其实镜像对称
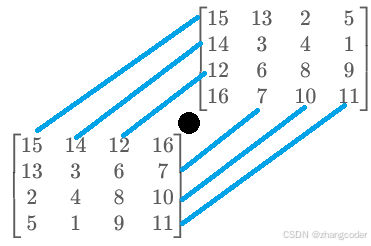
根据主对角线翻转其实是转置,也是关于中心点对称:
代码
class Solution {
public:void rotate(vector<vector<int>>& matrix)//非转置矩阵{int N=matrix.size();for (int col=0;col<=N/2-1;col++)//按行翻转swap(matrix[col],matrix[N-col-1]);//直接交换行索引,不用交换每个元素for (int row=0;row<N;row++)//将矩阵对称for (int col=0;col<row;col++)swap(matrix[row][col],matrix[col][row]);}
};注:将矩阵对称时,注意只需要对称上三角的元素(特征: col<row)
时间复杂度:
提交结果
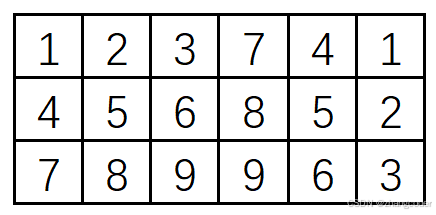
按行翻转的其他做法
利用矩阵相乘,按行翻转
方法:左乘一个矩阵
例如矩阵:左乘一个
,则有以下式子:
如果对于一个N*N的矩阵,对其进行按行翻转,可以左乘矩阵
代码遵循矩阵的乘法规则进行处理(注:和0相乘没有意义)
代码
class Solution {
public:void rotate(vector<vector<int>>& matrix)//非转置矩阵{int N=matrix.size();vector<vector<int>> tmp;for (int row=0;row<N;row++){vector<int> line;for (int col=0;col<N;col++){//第row行和第col行的对应元素相乘int sum=0;for (int index=0;index<N;index++){if (index+row==N-1)//如果满足条件,左乘的矩阵的第sum+=matrix[index][col];}line.push_back(sum);}tmp.push_back(line);}matrix=tmp; for (int row=0;row<N;row++)//对称矩阵for (int col=0;col<row;col++)swap(matrix[row][col],matrix[col][row]);}
};提交结果

方法4:使用旋转向量辅助解决
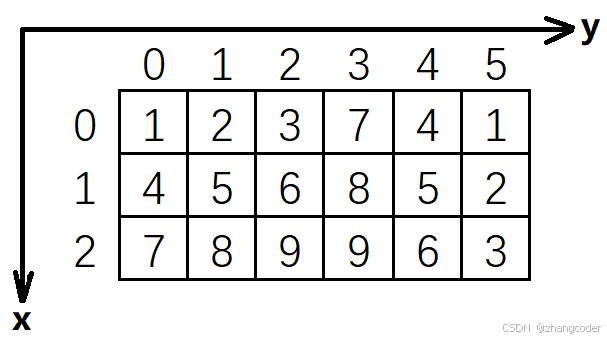
旋转矩阵实际上可以看做绕矩阵的右下角作顺时针旋转90°,如下图:
将旋转前后的矩阵拼在一起,看看有什么规律:
数学推导
带上坐标后:
看看旋转前后对应元素的坐标值的规律:
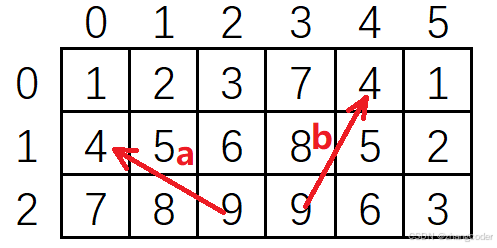
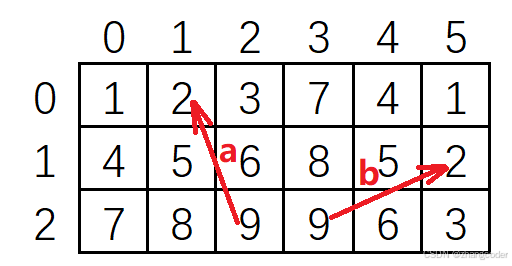
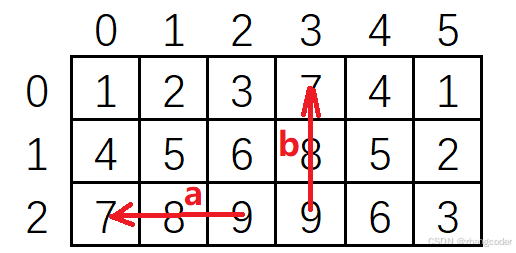
发现无论是什么元素选择,和
都是垂直的,换句话说
(
和
的起始点分别为旋转前矩阵的右下角和旋转后矩阵的做下角),
而且和
的横纵坐标是有规律的:
本质上通过右乘一个矩阵
得到
,矩阵的作用效果是使
顺时针旋转90°
可由此来计算旋转后各个元素的坐标
注:其实是
中
的情况
代码
设和
的起始点和终止点分别为A、B、C和D,则 A_x、A_y、B_x、B_y、C_x、C_y、D_x和D_y分别为它们的横纵坐标
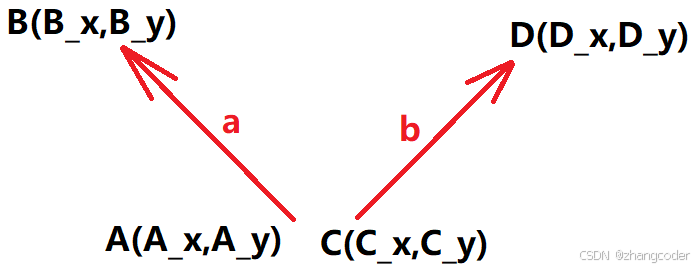
A和C的坐标是固定的,对于N*N的方阵而言,
A_x=N-1
A_y=N-1
C_x=N
C_y=N-1
准备代码
int N=matrix.size();
int arr[N][N];
int A_x=N-1,A_y=N-1,B_x,B_y,C_x=N-1,C_y=N,D_x,D_y;完整代码
class Solution {
public:void rotate(vector<vector<int>>& matrix){vector<vector<int>> tmp;const int N=matrix.size();int arr[100][100];int A_x=N-1,A_y=N-1,B_x,B_y,C_x=N-1,C_y=N,D_x,D_y;for (B_x=0;B_x<N;B_x++){for (B_y=0;B_y<N;B_y++){int a_x=B_x-A_x;int a_y=B_y-A_y;int b_x=a_y;int b_y=-a_x;//b_x==D_x-C_x,b_y==D_y-C_yD_x=b_x+C_x;D_y=b_y+C_y;arr[D_x][D_y-N]=matrix[B_x][B_y];}}for (int i=0;i<N;i++){vector<int> line;for (int j=0;j<N;j++)line.push_back(arr[i][j]);tmp.push_back(line);}matrix=tmp;}
};精简版代码(从上方代码化简而来)
class Solution {
public:void rotate(vector<vector<int>>& matrix){vector<vector<int>> tmp;const int N=matrix.size();int arr[100][100];for (int B_x=0;B_x<N;B_x++){for (int B_y=0;B_y<N;B_y++)arr[B_y][N-1-B_x]=matrix[B_x][B_y];}for (int i=0;i<N;i++){vector<int> line;for (int j=0;j<N;j++)line.push_back(arr[i][j]);tmp.push_back(line);}matrix=tmp;}
};提交结果