ros2_不同ROS_DOMAIN_ID环境变量之间通信
1.需求
两台linux ros2系统设备, 配置了不同环境变量ROS_DOMAIN_ID,
期望在不同的ROS_DOMAIN_ID 之间, 进行话题通信.
2.解决方案调研
方案1: 第3方库 接受/转发消息
MQTT通信:
设备1或设备2: 安装MOTT broker
设备1: MQTT订阅消息
设备2: MQTT发布消息
设备1: 接受消息, 直接处理 或 转发为ros2 topic
socket tcp/udp 通信:
同mqtt, 自定义tcp/udp服务, 接受/转发消息
方案2: 确认 ros2 官网是否有相关解决方案
参考: https://wenku.csdn.net/doc/5e604uicy3
domain_bridge 跨ROS_DOMAIN_ID 发布消息
官网
github
方案确认:
参考官网实例, 使用domain_bridge, 能简单快速实现需求.
故使用 方案2: domain_bridge
3.domain_bridge 说明
ros2 domain bridge github 链接
domain_bridge 安装
sudo apt install ros-$ROS_DISTRO-domain-bridge
domain_bridge配置文件
example_bridge_config.yaml
: https://github.com/ros2/domain_bridge/blob/main/examples/example_bridge_config.yaml
name: my_bridge
from_domain: 1 # 源 domain
to_domain: 2 # 目的 domain
topics:topic: # 话题名type: std_msgs/msg/String # 消息类型
4.domain_bridge 使用示例
1.话题发布publish
1_topic_public.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import Stringclass MinimalPublisher(Node):def __init__(self):super().__init__('minimal_publisher')self.publisher_ = self.create_publisher(String, 'topic', 10)timer_period = 0.5 # secondsself.timer = self.create_timer(timer_period, self.timer_callback)self.i = 0def timer_callback(self):msg = String()msg.data = 'Hello World: %d' % self.iself.publisher_.publish(msg)self.get_logger().info('Publishing: "%s"' % msg.data)self.i += 1def main(args=None):rclpy.init(args=args)minimal_publisher = MinimalPublisher()rclpy.spin(minimal_publisher)minimal_publisher.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
2.订阅端subscribe
2_topic_subscriber.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import Stringclass MinimalSubscriber(Node):def __init__(self):super().__init__('minimal_subscriber')self.subscription = self.create_subscription(String,'topic',self.listener_callback,10)self.subscription # prevent unused variable warningdef listener_callback(self, msg):self.get_logger().info('I heard: "%s"' % msg.data)def main(args=None):rclpy.init(args=args)minimal_subscriber = MinimalSubscriber()rclpy.spin(minimal_subscriber)minimal_subscriber.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
3.测试命令
终端设置不同的ROS_DOMAIN_ID环境变量, 进行通行
终端1:
export ROS_DOMAIN_ID=1
python3 1_topic_public.py
终端2:
export ROS_DOMAIN_ID=2
python3 2_topic_subscriber.py
此时 终端2 无法订阅到话题
终端3:
1.创建配置: example_bridge_config.yaml
# Name of the domain bridge, used for node naming and logging
name: my_bridge
from_domain: 1
to_domain: 2
topics:topic:type: std_msgs/msg/String
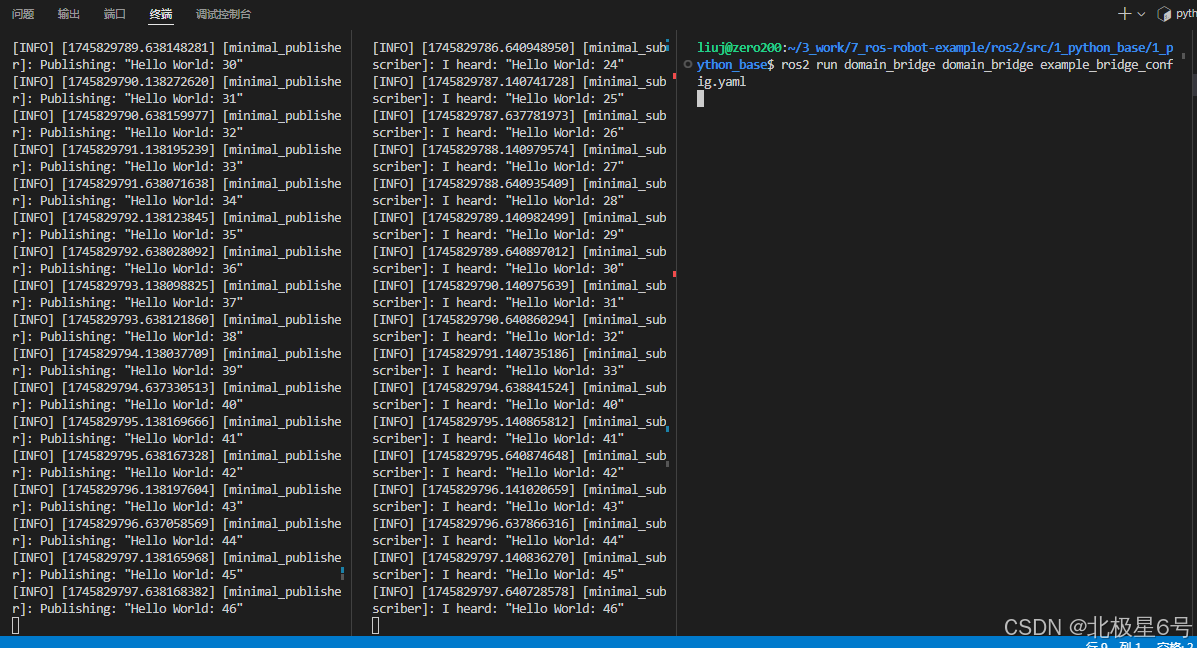
2.运行 domain_bridge
ros2 run domain_bridge domain_bridge example_bridge_config.yaml
此时会看到 终端2 能够订阅到话题
5.总结
- 一开始向 抖音豆包, 腾讯元宝 需求解决方案, 给的全是错误答案, 根本不可行
- 外网搜索, 匹配到关键字 domain_bridge , 才知道ros2 官方有跨ROS_DOMAIN_ID 通信解决方法