机器人学入门 (刚体空间 - 正/逆运动学 - 轨迹规划) 笔记 0.1 (台大机器人学-林沛群)
目录
1. 什么是机器人?
2. 为什么从机械手臂开始?
3. 机器人运动的两大面向
4. 课程内容框架
a. 刚体空间描述
b. 正/逆运动学
c. 轨迹规划
5. 课程适合人群
- 台大公开课链接:機器人學一 (Robotics (1)) - 物體在空間運動之描述 (一) - 第 1 周 | Coursera
- 视频链接:台大机器人学之运动学——林沛群(2019)_哔哩哔哩
- 在被台大-李宏毅老师圈粉后(超有趣的深度学习讲解),便顺藤摸瓜找到了台大-林沛群老师的机器人学在线课程
- 以下是视频课程的详细笔记(后续会持续更新)
作为机器人学系列课程的第一部分,我们将从最基础的机械手臂开始探索这个领域。
1. 什么是机器人?
机器人从问世至今已经发展了几十年,如今我们对机器人的定义已经非常广泛。简单来说,机器人就是一个人造的非生物系统,它可以有实体部分,也可以包含虚拟部分。
早期发展机器人的初衷是为了解决"3D"问题:
-
Dirty(肮脏的)
-
Dangerous(危险的)
-
Dull(枯燥的)
这些人类不愿意从事的工作,我们希望用机器人来替代。而近一二十年,机器人技术蓬勃发展,出现了更多面向的应用,比如:
-
服务型机器人(老人照护、陪伴)
-
导览机器人(图书馆、博物馆)
-
教育娱乐机器人
-
近年热门的无人驾驶汽车(本质上也是机器人)
可以看到,机器人的范畴不断扩大,涉及的技术也越来越多元,涵盖了机械(ME)、电机(EE)、智能工程等多个领域。
面向通用服务的机器人,会大有需求,有两个逻辑:
- 老龄化 / 少子化(可参考日本,老人需要照顾)
- 产业升级 -> 用工成本提高(保姆昂贵,可参考美日)
机器人可大幅度降低人工成本!未来5-10年,高度智能化的机器人可能不到10w元:

2. 为什么从机械手臂开始?
机器人学的核心基础是从机械手臂开始的。这是机器人领域发展最早也最成熟的部分。机械手臂的广泛应用始于工厂自动化,特别是在汽车制造业中:
-
替代危险的喷漆作业
-
搬运重型零部件
-
完成高重复性的组装工作
这些应用场景使得机械手臂的相关知识体系发展得最为完整,因此成为学习机器人学的理想起点
灵巧手技术指导今天还是机器人学的最前沿,是还未被人类征服、通往AGI的高峰
3. 机器人运动的两大面向
机器人与电脑最大的区别在于它能产生实际的运动。我们可以将机器人的运动分为两大类:
-
操作(类似人类双手的功能)
-
拿起物品
-
按压按钮
-
各种精细动作
-
-
移动(类似人类双脚的功能)
-
行走
-
导航
-
环境探索
-
本课程将重点放在"操作"这一部分,也就是机械手臂的相关知识。
4. 课程内容框架
我们将通过一个日常情境来学习:将一个马克杯从桌面拿起并挂到杯架上。这个过程涉及三个主要知识模块:
a. 刚体空间描述
-
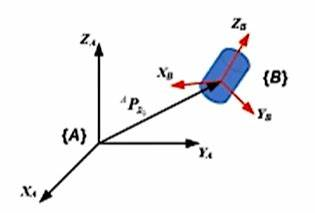
如何描述物体在空间中的位置和姿态
-
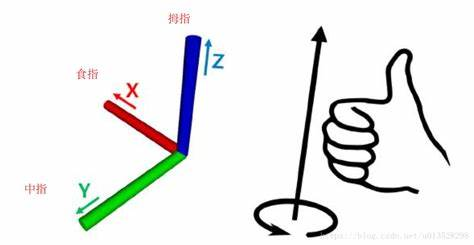
需要6个参数:3个平移(x,y,z) + 3个旋转
-
这是操作物体的基础
-
b. 正/逆运动学
-
顺(正)运动学:已知各关节状态 (转角) → 求末端执行器的位置姿态 (末端坐标)
(类似已知肌肉如何收缩 → 手末端会到达什么位置) -
逆运动学:已知末端执行器目标位置 (末端坐标) → 求各关节需要如何运动 (转角)
(类似已知手末端要到达某位置 → 需要计算肌肉如何收缩)
以这张图为例:
- 正运动学:用几个关节的转角θ,求p的坐标
- 逆运动学:用p的坐标,求几个关节的转角θ
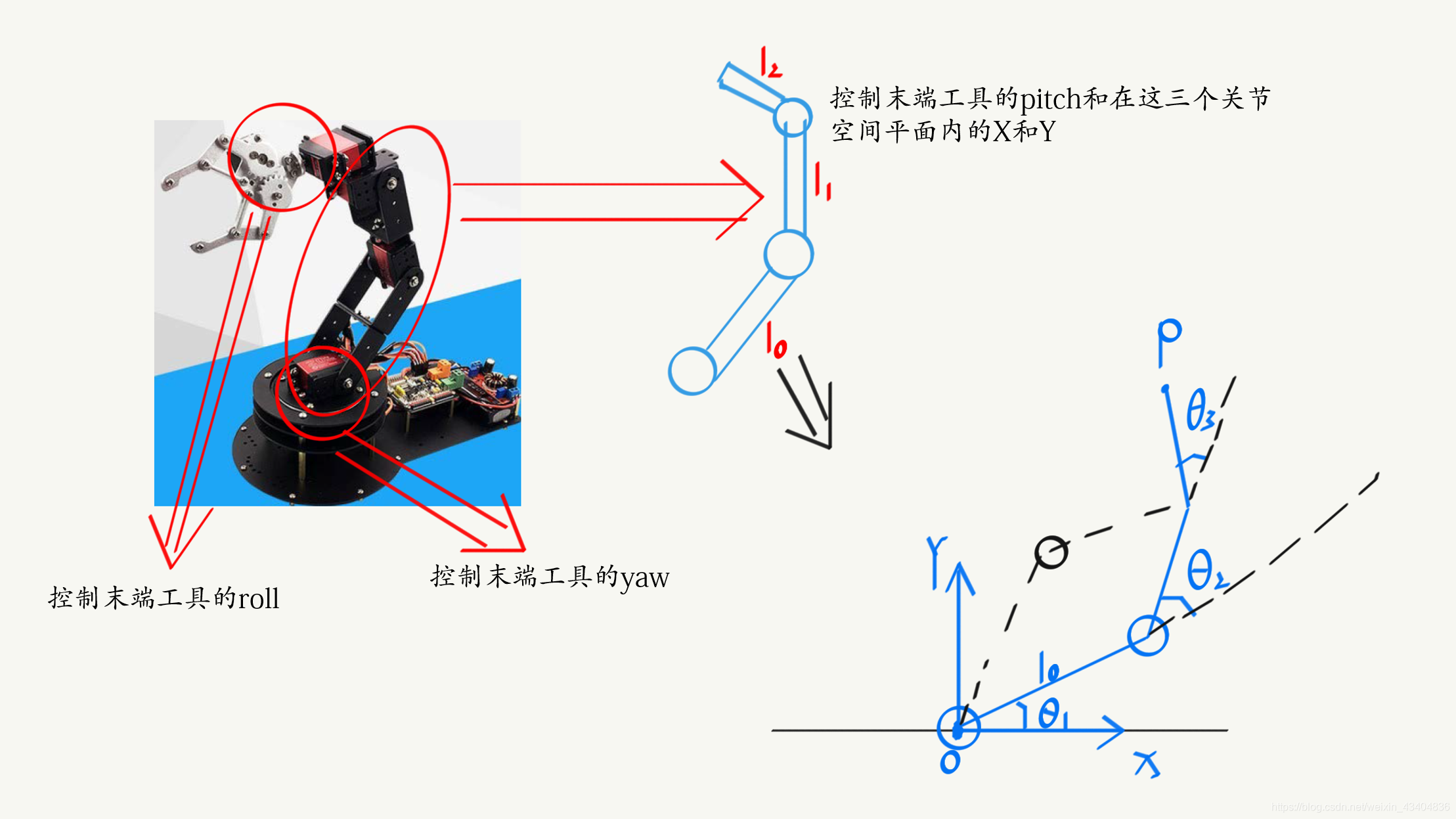
实际应用中,我们通常先确定末端执行器的目标位置(如抓取杯子),再通过逆运动学计算各关节的运动方式。
c. 轨迹规划
-
如何让运动更加平滑
-
避免突然的加速度变化
-
规划直线轨迹或特定路径
-
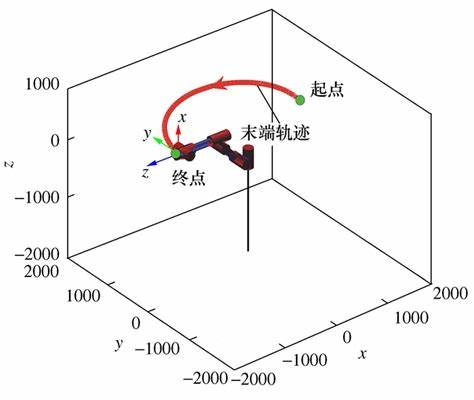
掌握了这三部分知识,我们就能让机械手臂完成"拿起杯子→挂到杯架"这一系列动作。
5. 课程适合人群
这门课程有一定的复杂度,主要面向:
-
理工科背景的同学
-
具备基础力学和线性代数知识的学习者
-
对机器人学感兴趣,且想入门的同学
课程采用线上视频教学,配合:
-
每周作业练习
-
视频中的随堂测验(台大公开课链接)
希望通过这门基础课程,能帮助大家对机器人学建立系统的认识,特别是机械手臂的工作原理和应用。如果你对这个领域感兴趣,欢迎一起加入学习!