搜维尔科技核心产品矩阵涵盖从硬件感知到软件渲染的全产品供应链
在虚拟现实(VR)技术加速渗透至人因工程、生物力学、拟态环境及XR仿真现实等多学科交叉领域的背景下,我司与恒挚科技展开交流合作,双方将依托我司在动作捕捉、力反馈设备及实时渲染软件等领域的全栈技术积累,共同开拓沉浸式技术解决方案新市场。此次合作的核心产品矩阵涵盖从硬件感知到软件渲染的全产品供应链。

Xsens惯性动作捕捉系统:将动作数字化,通过数据直观分析人体动作!


Xsens MVN系统通过17个微型惯性传感器实现全身动作捕捉,其核心优势在于:
全磁免疫技术:突破传统光学动捕的环境限制,在强磁干扰的工业现场或户外场景仍能保持亚毫米级精度。
实时生物力学分析:内置验证算法可输出关节角度、加速度等参数,特斯拉人形机器人Optimus正在使用该系统进行拟人动作训练。
跨平台兼容性:无缝集成Unity、Unreal等引擎,可实时将演员动作转换为虚拟角色动作。
Xsens惯性动作捕捉系统可应用于各类人因工程、人机交互等科研领域。为研究人员提供精确的人体运动数据。采集到的数据可实时传输到如Unity、Unreal、Motionbuilder等常用软件中或直接导出为Excel、FBX文件以方便研究人员直观观看人体各关节的移动角度,确定工作场所人体工程学是否符合要求,或如飞机、车辆、船舶驾驶舱是否符合人因工程学设计原理。
作为全球惯性动捕领域的标杆,Xsens惯性动作捕捉系统被应用与多家世界知名公司的人体工程学研究与工作场所设计流程中。如宝马公司正在使用Xsens动作捕捉系统优化其装配生产线工作场所人体工程设计。
除Xsens惯性动作捕捉系统之外,还展示了包括Haption力反馈设备、3D Systems Touch力反馈设备、Haply便携式力反馈设备、Techviz多通道显示软件、Weviz实时三维实时渲染软件等多款公司主销产品。
Haption Virtuose 力反馈设备
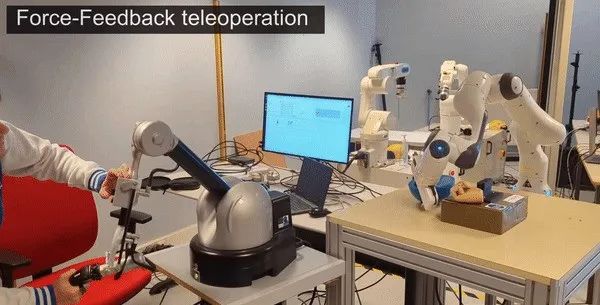
Virtuose 6D TAO的主臂十分稳健,能够为用户提供无与伦比的触觉体验。通过几千小时的远程机器人操作测试,Virtuose 6D TAO已经证明其长期的可靠性。
工业级性能:Virtuose 6D TAO可提供35N(高力版本70 N)的峰值力反馈,支持核工业废料处理等高危场景的远程机器人操控任务。
医疗领域突破:提供高精度的触觉反馈,帮助医生感知虚拟组织阻力。
3D Systems Touch力反馈设备

3D Systems Touch设备在科研领域表现尤为突出,被众多院校应用于科研项目中,其具有以下特点:
高精度触觉感知:通过450 dpi的位置分辨率实现微力感知,提升操作培训效果与科研项目中的操作精度。
开源生态支持:OpenHaptics® SDK、Unreal®、Unity® 兼容,可实现触觉交互,加速机器人控制算法开发。
Haply Inverse3便携式力反馈设备

Haply Robotics的旗舰产品Inverse3以0.01mm分辨率和4kHz刷新率为用户带来细致入微的触觉体验:
轻量化设计:设备仅重1.6kg,支持即时部署。
人体工学优化:Inverse3 采用人体工学设计,适合长时间使用,可根据任何工作空间或工作流程进行配置,确保舒适性和控制性。最多可同时使用两台设备,并可实时调整 Inverse3 的方向,以适应任何用户的体型和左、右手使用习惯。
开发友好性:支持多种编程语言和游戏引擎,简化了高级触觉和控制的集成。
Techviz多通道软件解决方案



高分辨率融合:提供跨平台高分辨率渲染,支持CAVE洞穴式投影系统与虚拟现实头显的混合显示。
强大的兼容性:无缝支持多达200种各行业的应用程序,以及所有基于OpenGL渲染技术的软件。
人机工程验证:可直接应用多种动作捕捉,包括光学捕捉系统,导航系统,头戴式显示器等,实时进行移动、装配、干涉分析。
Weviz三维实时渲染软件

Weviz实时渲染引擎以三大核心技术突破行业瓶颈:
实时渲染技术:得益于下一代渲染技术,无需等待耗时的渲染,用户可以实时工作,并立即看到结果。
跨平台协作:支持HTC Cosmos\VIVE、Oculus Quest2、Valve Index等多种VR头显,设计师可通过VR头显在1:1模型中直接标注修改意见。
多种工业软件格式兼容:原生支持Rhino、Blender等多种3D格式,以实现多平台生物力学和人体工程学虚拟评审。
战略协同:打造沉浸式技术新生态
我司与恒挚科技的合作交流将为双方开启全新的市场方向,此次合作交流不仅为我司打开了人因工程领域的全新合作发展方向,也同时打破了恒挚科技在运用虚拟现实技术方面的技术壁垒,我们相信通过此次交流合作,我司与恒挚科技未来将会在人因工程与虚拟现实这一全新方向携手共进,为市场提供更多具有实际效益的优质解决方案。