集成电路学习:什么是Camera Calibration相机标定
Camera Calibration:相机标定

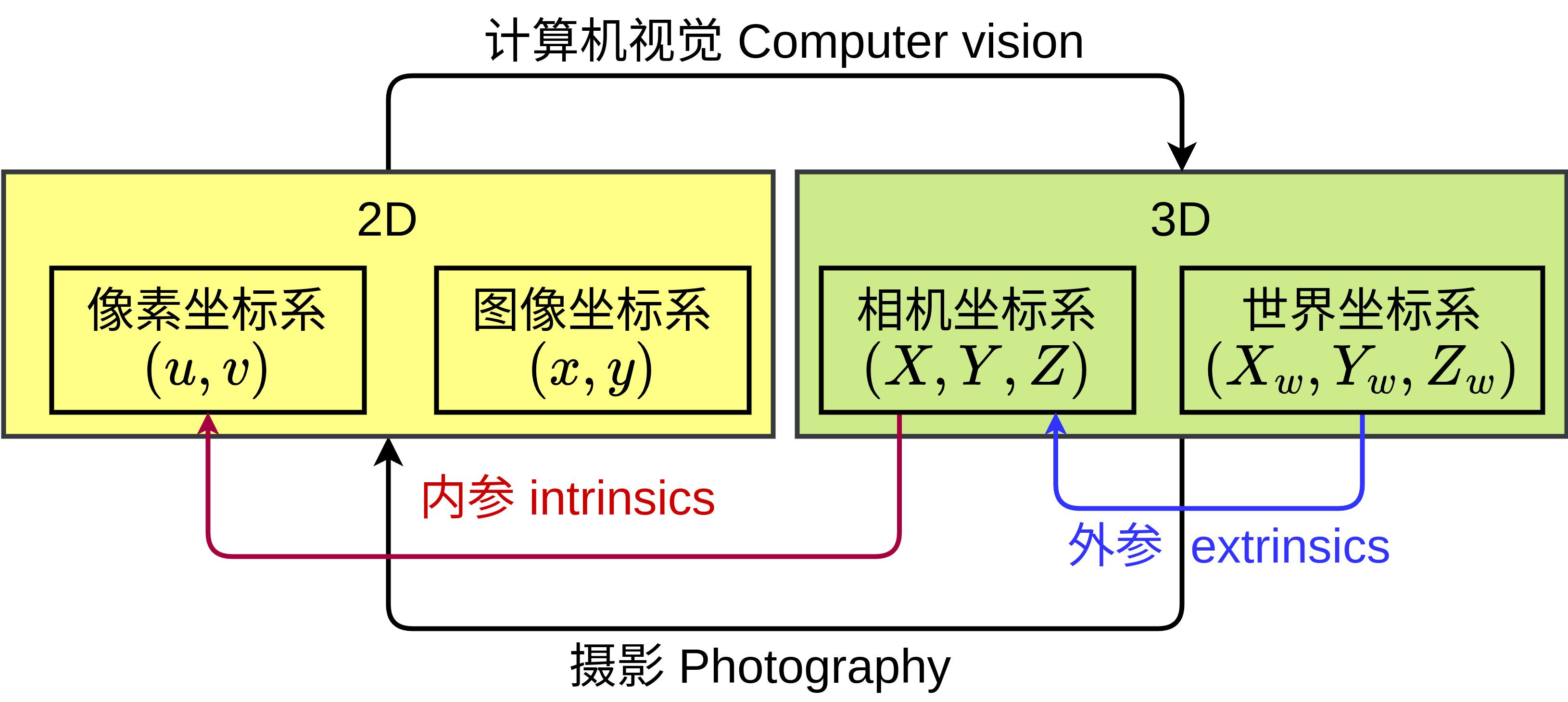
Camera Calibration(相机标定)是计算机视觉和图像处理中的一个重要过程,它主要用于建立相机图像像素位置与三维空间场景点位置之间的关系。这一过程涉及到求解相机的成像模型参数,包括内部参数和外部参数,以确保从二维图像中准确恢复出三维空间信息。以下是关于相机标定的详细解答:
一、相机标定的定义与目的
相机标定的定义:
相机标定是指通过一系列实验和计算,求解相机的成像模型参数的过程。这些参数包括相机的焦距、主点坐标等内部参数,以及相机在世界坐标系中的位置和方向等外部参数。
相机标定的目的:
建立相机成像的几何模型,以描述三维空间点到二维图像点之间的映射关系。在图像测量和机器视觉应用中,相机标定的精度直接影响到后续工作的结果。准确的相机标定参数是三维重建、物体识别、定位等任务的基础。
二、相机标定的步骤
相机标定的步骤通常包括以下几个部分:
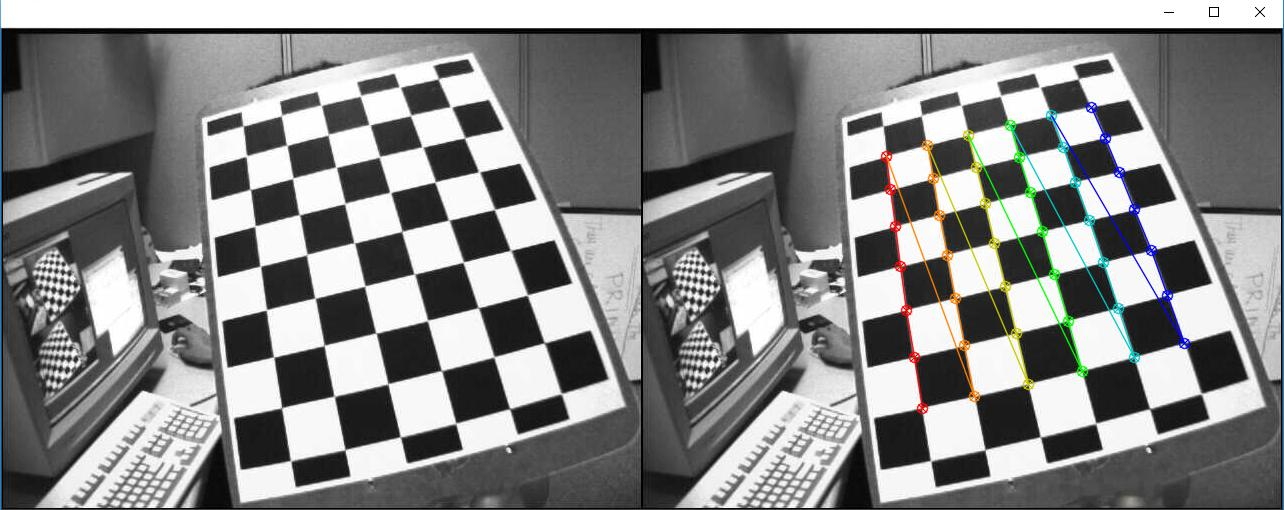
1、准备标定物:
&nb