数据挖掘 3.5 支持向量机——边界和正则化
3.5 Margin and Regularization
3.5 边界和正则化
边界和正则化
- 求一个点距离线性分类器的距离
- 向量 w\mathbf{w}w 垂直于线性判别式
- 求距离margin
- 举一个实例
- 支持向量机的另一个视角
- SVM(支持向量机)优化问题的两种等价形式
- 无约束优化问题 (Unconstrained Optimization Problem)
- 有约束优化问题 (Constrained Optimization Problem)
- 对应关系
求一个点距离线性分类器的距离
考虑一个线性分类器,其分界面为:
f(x)=wTx+b=0对于所有在边界上的 xf(\mathbf{x}) = \mathbf{w}^T \mathbf{x} + b = 0 \quad \text{对于所有在边界上的} \ \mathbf{x} f(x)=wTx+b=0对于所有在边界上的 x
向量 w\mathbf{w}w 垂直于线性判别式

证明过程
假设在边界上有两个点 x(1)\mathbf{x}^{(1)}x(1) 和 x(2)\mathbf{x}^{(2)}x(2):
f(x(1))=wTx(1)+b=0(1)f(\mathbf{x}^{(1)}) = \mathbf{w}^T \mathbf{x}^{(1)} + b = 0 \tag{1} f(x(1))=wTx(1)+b=0(1)
f(x(2))=wTx(2)+b=0(2)f(\mathbf{x}^{(2)}) = \mathbf{w}^T \mathbf{x}^{(2)} + b = 0 \tag{2} f(x(2))=wTx(2)+b=0(2)
用式 (2) 减去式 (1):
wT(x(2)−x(1))=0\mathbf{w}^T \left( \mathbf{x}^{(2)} - \mathbf{x}^{(1)} \right) = 0 wT(x(2)−x(1))=0由此可得: w⊥(x(2)−x(1))\mathbf{w} \perp \left( \mathbf{x}^{(2)} - \mathbf{x}^{(1)} \right)w⊥(x(2)−x(1))
即权重向量 W 与边界上的任意两个点的连线方向垂直。
求距离margin
设 x(s)\mathbf{x}^{(s)}x(s) 是特征空间中的一个点,它在边界上的投影为 x(p)\mathbf{x}^{(p)}x(p):
f(x(p))=wTx(p)+b=0(3)f(\mathbf{x}^{(p)}) = \mathbf{w}^T \mathbf{x}^{(p)} + b = 0 \tag{3} f(x(p))=wTx(p)+b=0(3)

根据向量计算, x(s)=x(p)+rw^(4)\mathbf{x}^{(s)} = \mathbf{x}^{(p)} + r \hat{\mathbf{w}}\tag{4}x(s)=x(p)+rw^(4)
w^\hat{\mathbf{w}}w^是 w\mathbf{w}w的方向向量,长度为1,
w^=w∥w∥(5)\hat{\mathbf{w}}=\frac{\mathbf{w}}{\|\mathbf{w}\|}\tag{5}w^=∥w∥w(5)
求训练数据点 x(s)\mathbf{x}^{(s)}x(s)的标签值, f(x(s))=wTx(s)+bf(\mathbf{x}^{(s)}) = \mathbf{w}^T \mathbf{x}^{(s)} + bf(x(s))=wTx(s)+b, 将(4)代入,
f(x(s))=wT(x(p)+rw^)+bf(x(s))=wTx(p)+rwTw^+bf(\mathbf{x}^{(s)})= \mathbf{w}^T \left( \mathbf{x}^{(p)} + r \hat{\mathbf{w}} \right) + b\\ \\ f(\mathbf{x}^{(s)})= \mathbf{w}^T \mathbf{x}^{(p)} + r \mathbf{w}^T \hat{\mathbf{w}} + b\\ f(x(s))=wT(x(p)+rw^)+bf(x(s))=wTx(p)+rwTw^+b将(5)代入,
f(x(s))=wTx(p)+b+rwTw∥w∥f(\mathbf{x}^{(s)})= \mathbf{w}^T \mathbf{x}^{(p)} + b + r \, \mathbf{w}^T \frac{\mathbf{w}}{\|\mathbf{w}\|} f(x(s))=wTx(p)+b+rwT∥w∥w
代入(3),
f(x(s))=0+rwTw∥w∥f(x(s))=0+rwTw∥w∥f(x(s))=0+r∥w∥f(x(s))=r∥w∥f(\mathbf{x}^{(s)})=0+r \, \mathbf{w}^T \frac{\mathbf{w}}{\|\mathbf{w}\|}\\ f(\mathbf{x}^{(s)})= 0+r \frac{\mathbf{w}^T\mathbf{w}}{\|\mathbf{w}\|}\\ f(\mathbf{x}^{(s)})=0 + r \|\mathbf{w}\| \\f(\mathbf{x}^{(s)})= r \|\mathbf{w}\| f(x(s))=0+rwT∥w∥wf(x(s))=0+r∥w∥wTwf(x(s))=0+r∥w∥f(x(s))=r∥w∥
由此,
r=f(x(s))∥w∥r = \frac{f(\mathbf{x}^{(s)})}{\|\mathbf{w}\|} r=∥w∥f(x(s))
解释: rrr 表示点 x(s)\mathbf{x}^{(s)}x(s) 到边界的有符号距离,w\mathbf{w}w 是法向量,w^\hat{\mathbf{w}}w^ 是单位法向量。
举一个实例
rrr 的距离是如何计算出来的?
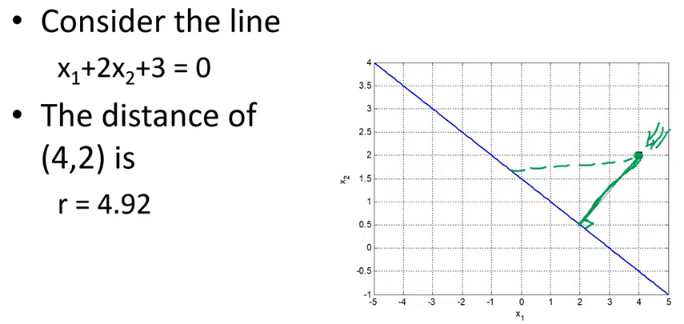
r=f(x(s))∥w∥=4+2∗2+312+22=115≈4.92r = \frac{f(\mathbf{x}^{(s)})}{\|\mathbf{w}\|} = \frac{4+2*2+3}{\sqrt{1^2+2^2}} = \frac{11}{\sqrt{5}}\approx4.92 r=∥w∥f(x(s))=12+224+2∗2+3=511≈4.92
支持向量机的另一个视角

Hinge Loss: l(f(x),y)=max(0,1−yf(x))l(f(x), y) = \max(0, 1 - y f(x))l(f(x),y)=max(0,1−yf(x))
基于链式损失函数限制:
y⋅f(x)≥1y \cdot f(x) \geq 1y⋅f(x)≥1
对于正类(y=+1y=+1y=+1):
f(x)≥1f(x) \geq 1f(x)≥1
对于负类(y=−1y=-1y=−1):
f(x)≤−1f(x) \leq -1f(x)≤−1
恰好在间隔边界上的支持向量满足:
y⋅f(x)=1y \cdot f(x) = 1y⋅f(x)=1
因此正类支持向量:
f(x(s))=1f(x^{(s)}) = 1f(x(s))=1
代入得到:
r=f(x(s))∥w∥r = \frac{f(\mathbf{x}^{(s)})}{\|\mathbf{w}\|} r=∥w∥f(x(s))
r=1∥w∥r = \frac{1}{\lVert \mathbf{w} \rVert} r=∥w∥1
SVM(支持向量机)优化问题的两种等价形式
无约束优化问题 (Unconstrained Optimization Problem)
minw12w⊤w+CN∑i=1Nmax{0,1−yif(xi;w)}\min_{w}\;\; \frac{1}{2} w^{\top} w \;+\; \frac{C}{N}\sum_{i=1}^{N} \max\!\{0,\; 1 - y_i\, f(x_i; w)\} wmin21w⊤w+NCi=1∑Nmax{0,1−yif(xi;w)}
有约束优化问题 (Constrained Optimization Problem)
minw,ξ12w⊤w+CN∑i=1Nξis.t.yif(xi;w)≥1−ξi,i=1,…,N,ξi≥0.\begin{aligned} \min_{w,\,\xi}\;\; & \frac{1}{2}\, w^{\top} w \;+\; \frac{C}{N}\sum_{i=1}^{N} \xi_i \\ \text{s.t.}\;\; & y_i\, f(x_i; w) \;\ge\; 1 - \xi_i,\quad i=1,\dots,N,\\ & \xi_i \;\ge\; 0. \end{aligned} w,ξmins.t.21w⊤w+NCi=1∑Nξiyif(xi;w)≥1−ξi,i=1,…,N,ξi≥0.
对应关系
ξi=max{0,1−yif(xi;w)}\xi_i \;=\; \max\{0,\; 1 - y_i\, f(x_i; w)\} ξi=max{0,1−yif(xi;w)}
Note: 边距最大化 = 正则化