仿真每日一练 | Workbench曲柄滑块机构刚体动力学分析
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的机构中。曲柄滑块机构以曲柄为主动件,滑块为从动件,将曲柄的转动转换为滑块的往复运动,在实际工程中应用非常广泛,本节通过曲柄滑块机构具体介绍一下曲柄滑块机构刚体动力学分析流程及方法。
1.有限元仿真流程
✦1-1.前处理
1-1-1.几何模型构建
1-1-2.材料定义
1-1-3.有限元系统模型构建
✦1-2.求解
1-2-1.加载条件/边界条件
1-2-2.求解设置
✦1-3.后处理
1-3-1.查看结果
1-3-2.评估结果
1-3-3.修正结果

2.前处理
2.1几何模型的构建
打开ANSYS Workbench 2020 R2界面,在左侧工具箱(Toolbox)中的分析系统(Analysis Systems)中双击刚体动力学(Rigid Dynamics)创建刚体动力学工程项目。双击【Geometry】单元进入Design Modeler界面,点击菜单栏中的【File】,选择【Import External Geometry File…】,找到模型所在的路径,选择相对应的模型导入,点击【Generate】生成,便得到如图1所示的模型。

图1 模型导入
2.2材料的定义
材料采用默认的结构钢,不需要重新进行定义。
2.3构建有限元系统模型
构建有限元系统模型主要包括7要素,如图2所示。

图2 七要素
具体流程及操作步骤如图3所示。
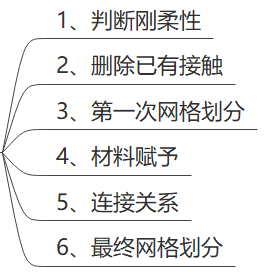
图3 操作流程
2.3.1判断刚柔性:均采用默认刚性体。
2.3.2删除已有接触。
2.3.3第一次网格划分:由于均为刚性体,不需要进行网格划分。
2.3.4材料赋予:采用默认结构钢。
2.3.5连接关系设定:创建曲柄与地面之间的转动副、曲柄与连杆之间的转动副、连杆与滑块之间的转动副、滑块与地面之间的移动副,如图4所示。

图4 连接关系的建立
2.3.6最终网格划分:由于均为刚性体,不需要进行网格划分。
3.求解
3.1设定边界条件
对连杆与地面的转动副添加关节载荷,采用转速的方式进行驱动,转速为18.84rad/s,如图5所示。

图5 施加驱动
3.2求解设置
求解设置保持默认
4.后处理
4.1 整体位移曲线图
整体位移曲线图如图6所示。

图6 整体位移曲线图
4.2滑块位移曲线图
滑块位移曲线图如图7所示。

图7 滑块位移曲线图