仿生机械轮腿式车辆在丘陵和山区姿态控制的方法
编辑:陈萍萍的公主@一点人工一点智能
“1.2秒自动调平!这款仿生轮腿农机让梯田作业不再难”本研究提出了一种适用于山地和丘陵地区的仿生机械轮腿式车辆配置,解决了传统农业机械设备在这些区域作业效率低下和稳定性差的问题。![]() https://mp.weixin.qq.com/s/mRcRWkaNmjAvHcZUVwkbXg
https://mp.weixin.qq.com/s/mRcRWkaNmjAvHcZUVwkbXg
01 简介
本文研究了一种新型的仿生机械轮腿式车辆,旨在解决传统农业机械在山地和丘陵地区作业效率低、稳定性差的问题。
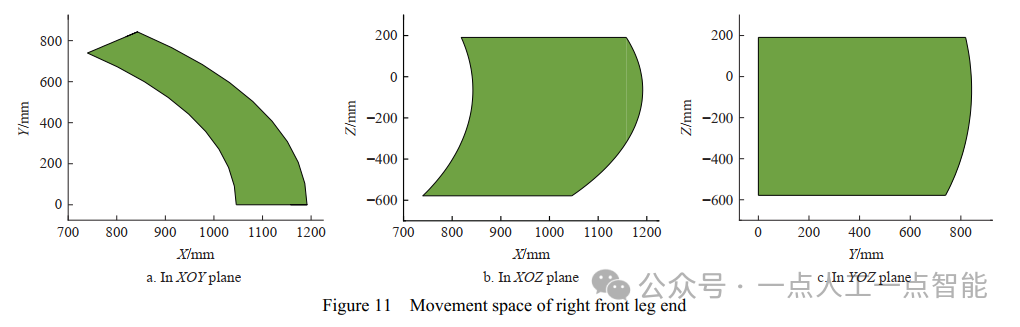
文章首先介绍了该车辆结构的设计理念,模仿了蝗虫后腿的运动原理,并结合气液连续杆机制,设计出一种新型轮腿组合结构。通过D-H参数法对这一结构进行了运动学分析,验证了其末端可以在X方向0-450毫米、Y方向0-840毫米、Z方向0-770毫米范围内移动,为实现整车多种功能提供了结构基础。
此外,基于NSGA-II算法构建了一个全方位调平姿态控制系统,并通过ADAMS-Matlab联合仿真模型验证了该算法的有效性。结果表明,在复杂山地和丘陵地形中,轮腿式车辆的最大俯仰角调平误差为1.08°,最大横滚角调平误差为1.19°,优于传统的PID控制算法。
实验部分包括全方位调平测试和自动调整离地间隙测试,结果显示原型车能在复杂地形下实现全方位自动调平,平均调平时间为约1.2秒,平均调平误差为0.8°,姿态控制的响应速度和调平精度满足实际工作要求。同时,车辆的离地间隙可在24至574毫米范围内自动调节,满足了山地和丘陵地区复杂地形的需求。
02 系统设计与理论分析
2.1 车辆总体设计
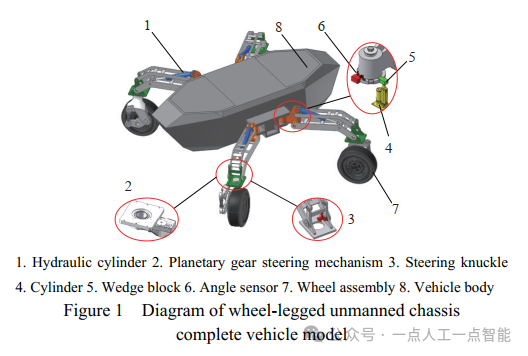
车辆由轮腿机构、转向机构、车身与动力系统构成(图1)。关键子系统设计如下:
· 轮腿机构:液压缸作为主动驱动元件,通过伸缩调节车辆高度;行星齿轮转向机构实现单轮0-90°摆动,配合楔形块锁定位置,调节轮距与轴距。
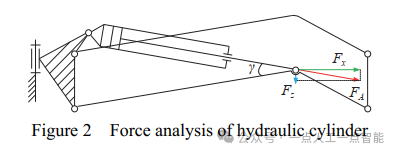
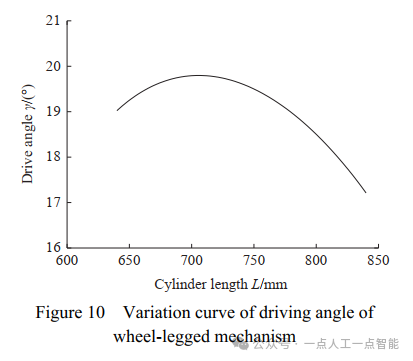
· 液压系统:双作用液压缸推力分析(图2),通过杠杆力学模型计算水平与垂直分力(式未明确给出),确保机构在运动过程中无死点(传动角始终非零,图10)。
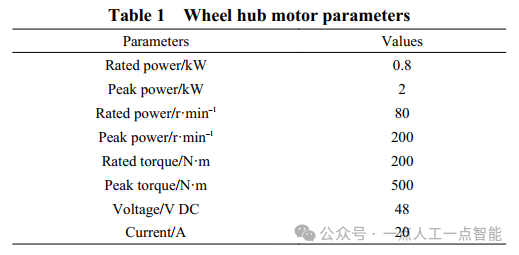
· 动力系统:轮毂电机参数(表1)满足最大爬坡需求,电池容量11.32 kW·h支持3小时续航,功率计算基于恒定速度下的滚动阻力与空气阻力(式1)。
![]()
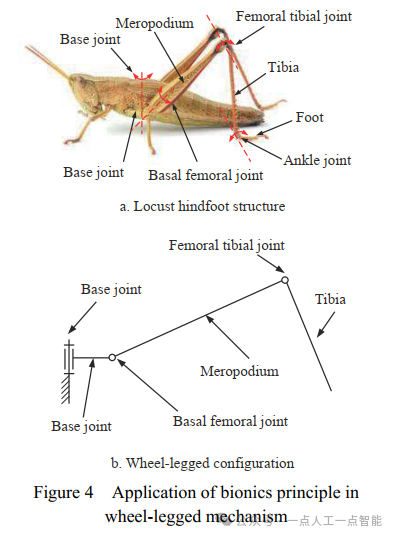
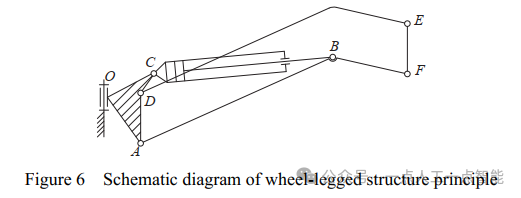
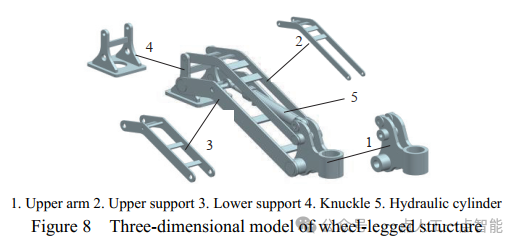
2.2 轮腿结构仿生学设计
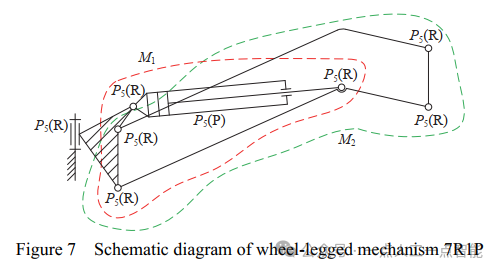
结构原理(图4-8):
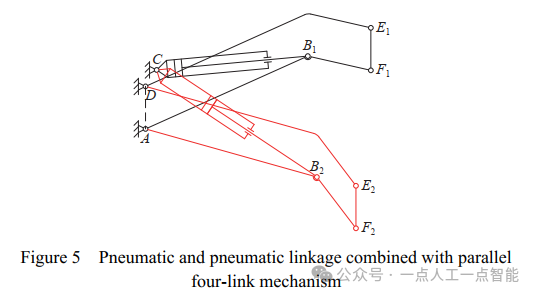
· 仿蝗虫后腿的关节分段(基节、股节、胫节),通过平行四杆机构(图5)确保末端轮胎始终垂直地面,实现直线稳定性。
· 引入7R1P多闭环空间机构(图7),自由度分析(式2)表明需两个主动件(液压缸与摆臂)驱动,验证了结构的可控性。
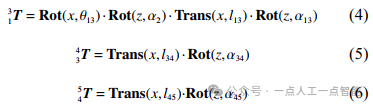
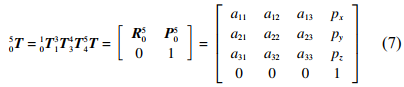
运动学分析:
· 基于D-H参数法建立右前腿运动学模型(图9),坐标系变换矩阵(式3-7)推导末端点位置函数(式8-9)。
![]()
![]()
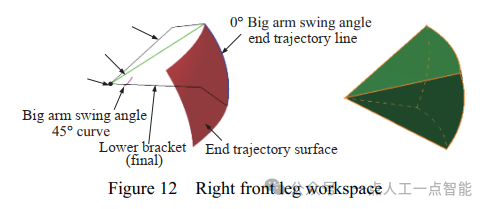
· 末端位置受摆臂旋转角α与液压缸长度l34共同影响(图11-12),X/Y方向运动范围由两者联合控制,Z方向仅依赖l34,揭示了高度调节的独立性。
2.3 姿态控制算法
NSGA-II多目标优化:
· 输入变量:液压缸伸缩量、轮心绝对位置、接地力;输出变量:目标俯仰角、横滚角、重心高度。
· 优化目标:最小化姿态角偏差,避免“弱腿”(接地力<100N持续0.5s时触发补偿),限制重心过高(伸缩量>120mm持续0.75s时触发收缩)。
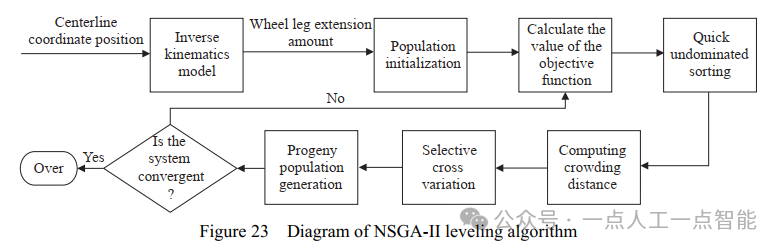
· 算法流程(图23):通过快速非支配排序与拥挤距离计算,生成帕累托最优解集,平衡调平精度与稳定性。
数学模型:
· 轮心位置函数(式10、15)关联液压缸伸缩与车身位姿;
![]()
![]()
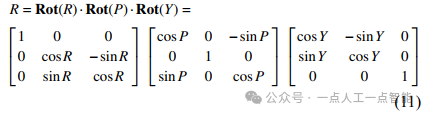
· 坐标变换矩阵(式11-14)将车身坐标系映射至大地坐标系,结合SVD分解(式16-19)求解旋转矩阵与姿态角(式21-23)。
![]()
![]()
03 仿真与实验验证
3.1 运动学仿真
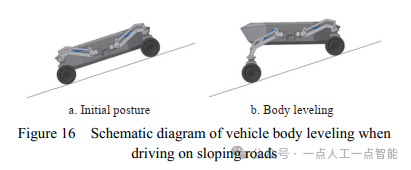
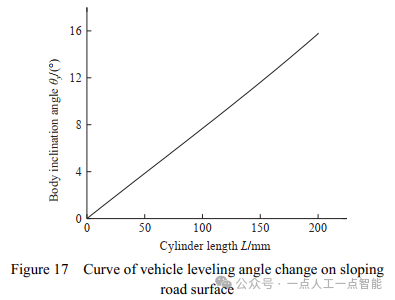
· 斜坡调平(图16-17):液压缸伸缩与车身倾角呈线性关系,最大调平坡度16°(斜坡)与27°(侧坡),验证了液压驱动的有效性。
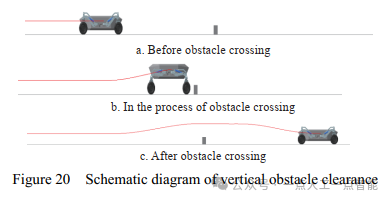
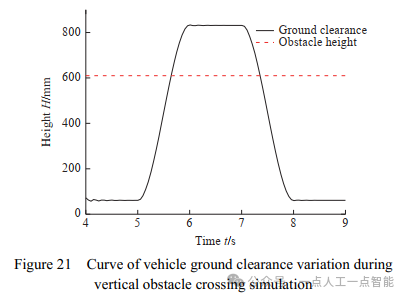
· 垂直越障(图20-21):液压缸伸长200 mm时离地间隙达800 mm,满足越障需求,且重心变化平滑(图21),避免动态失稳。
3.2 控制算法对比
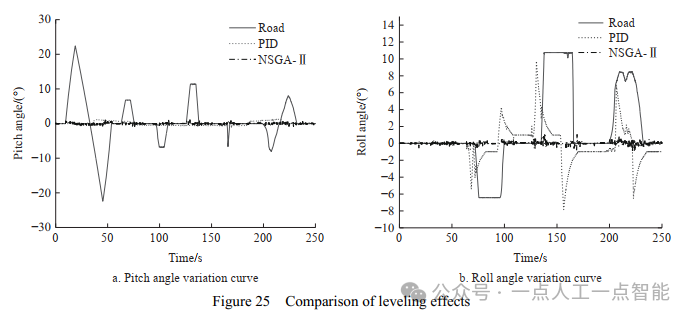
· NSGA-II vs PID(图25):NSGA-II在横滚控制中引入弱腿补偿,标准偏差(0.176°)显著低于PID,综合调平精度更高。
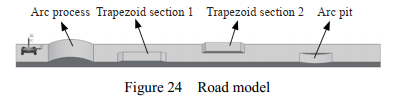
· 多地形仿真(图24):针对凸起、梯形坡、凹陷路段,NSGA-II算法通过动态调整液压缸伸缩量,保持车身水平,适应复杂路况。
3.3 原型测试
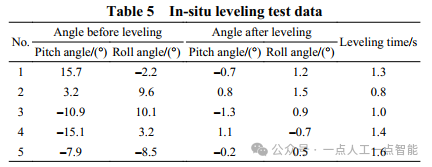
· 原位调平(表5):5组测试平均调平时间1.2 s,误差0.8°,满足实时性要求;
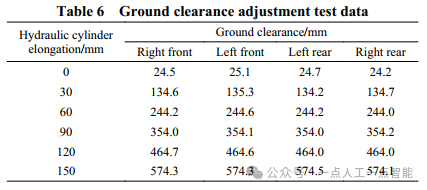
· 离地间隙调节(表6):液压缸伸长150 mm时离地间隙达574 mm,验证越障能力。
04 结论与展望
本研究提出了一种适用于山地和丘陵地区的仿生机械轮腿式车辆配置,解决了传统农业机械设备在这些区域作业效率低下和稳定性差的问题。主要结论如下:
首先,通过模仿蝗虫后腿的运动原理,并结合气液连续杆机制,设计了一种新型轮腿组合结构。使用D-H参数法进行运动学分析,证实了该结构末端可以在X方向0-450毫米、Y方向0-840毫米、Z方向0-770毫米范围内移动,为实现多功能化整车提供了坚实基础。
其次,基于NSGA-II算法构建了一个全方位调平姿态控制系统,并通过ADAMS-Matlab联合仿真模型验证了该算法的有效性。结果显示,在复杂山地和丘陵地形中,轮腿式车辆的最大俯仰角调平误差为1.08°,最大横滚角调平误差为1.19°,优于传统的PID控制算法。
最后,实验部分包括全方位调平测试和自动调整离地间隙测试,验证了原型车在复杂地形下能实现全方位自动调平,平均调平时间为约1.2秒,平均调平误差为0.8°,姿态控制的响应速度和调平精度均能满足实际工作需求。同时,车辆的离地间隙可在24至574毫米范围内自动调节,满足了山地和丘陵地区复杂地形的要求。
未来的研究将进一步优化姿态控制算法,提升车辆在极端地形条件下的稳定性和机动性,并探索更多智能化控制技术的应用,以期为现代农业机械装备的发展提供更加全面的技术支持。