技术分享:Franka机器人新方案——双臂数据采集与适应性安装,带你探索具身智能的奥秘
双臂倾斜安装的Franka机器人进行数据采集,在具身数据收集领域非常必要。如果您遇到下列需求,对于Franka可能需要侧装会有优势:
-
提高机器人的灵巧性、协调性和操作效率:数据采集对于评估模拟环境中机器人手臂的表现至关重要,有助于弥合理论模型与实际应用之间的差距
-
获取真实世界的数据:通过实际的数据采集,可以确保机器人系统在动态现实世界环境中的可靠运行
-
支持复杂任务的策略制定:充分的训练示例对于为复杂任务制定稳健策略至关重要,数据采集提供了这些必要的示例
-
优化机器人控制和运动规划:通过采集的数据,科研人员可以训练深度神经网络,优化机器人的动作策略,提高操作效率和准确性
-
实现精确的力控制和复杂的交互操作:Franka机器人集成了高精度的力/扭矩传感器和先进的控制算法,数据采集使得机器人能够实时感知和反馈外界施加的力
上述领域的数据采集对于提升双臂倾斜安装的Franka机器人的性能和适应性至关重要。参考安装图如下:
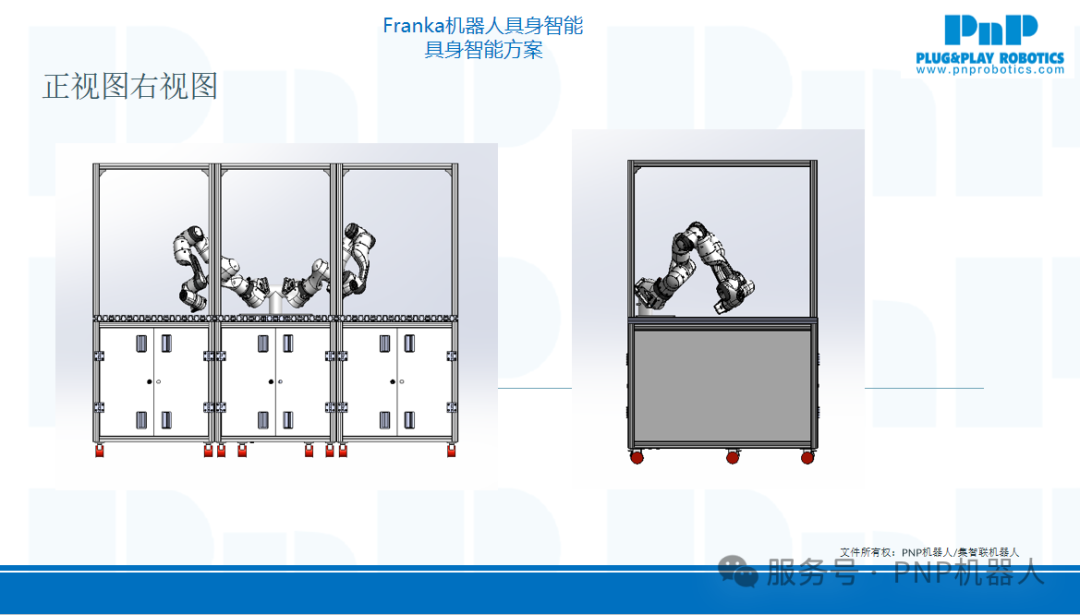
如果需要侧方位等适应性安装,请参考设置步骤
1.系统准备
1.1 升级到 5.6.0 以上系统版本;
1.2 执行恢复出厂设置;
1.3 下载状态文件, 同步到 FrankaWorld;
1.4 从 FrankaWorld 下载同步文件,上传到机器人;
1.5 下载状态文件, 同步到 FrankaWorld;
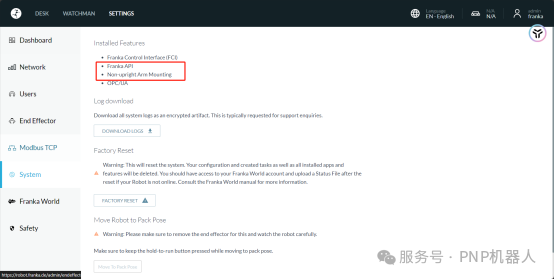
同步后的系统应包含 Franka API 和 Non-upright Arm Mounting 两个选项。
2.适应性安装配置
电脑通过网线连接机器人基座网口, 电脑端设置 DHCP。通过浏览器,访问 robot.franka.de/swagger。
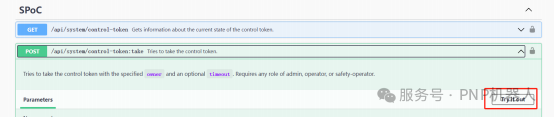
2.1 获取 SPOC 权限
a.选择 /api/system/control-token:take

b.点击 Try it out
c.点击 Execute
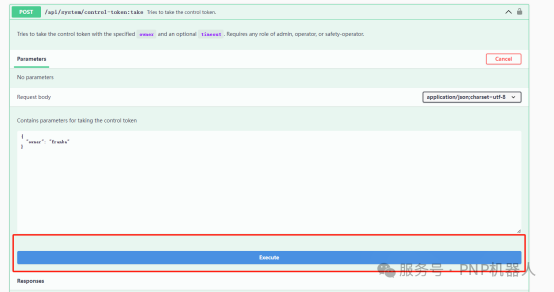
d.输入 desk 中,管理员对应的用户名和密码并登录。
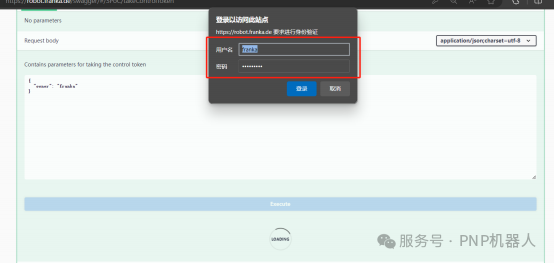
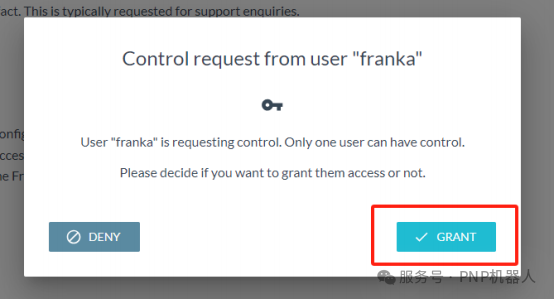
e. 回到 desk 中,点击 GRANT 确认授权。
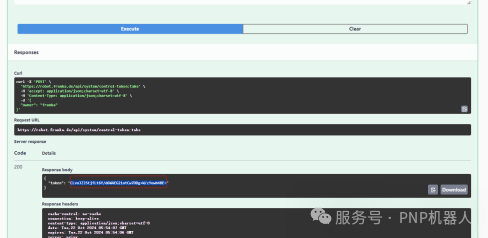
f. 向下滚动到此 API 对应的 Responses 部分。 从 Response body 处,复制 token 码(复制 内容为双引号内的编码,不包含双引号)
2.2 设置安装角度
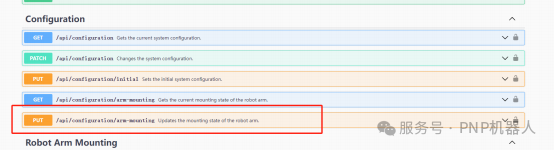
a.选择/api/configuration/arm-mounting/ ( PUT)
b.点击 Try it out
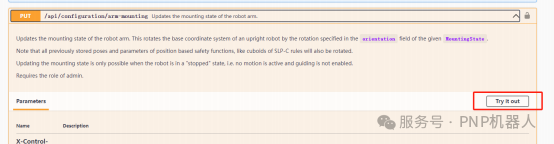
c.将先前复制的 token 码粘贴到 X-Control-Token 处
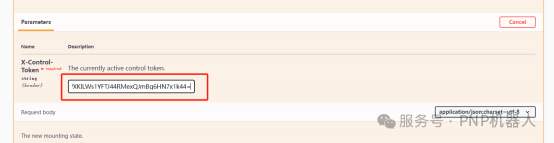
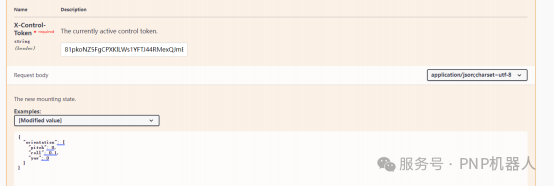
d.在 request body 中输入想要设置的安装角度
参数中的 roll, pitch, yaw 分别对应绕 x,y,z 三个轴的旋转角度;注意:此处输入的角度单位是 rad。
一定要正确计算旋转方向、数值,避免错误设置,造成设备及人员损害。
e.确认输入数值无误后,点击 Execute。
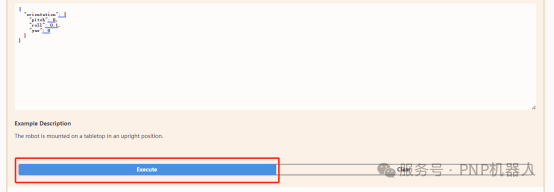
f.响应码为 204 代表执行成功。

g.可以通过/api/configuration/arm-mounting/ ( GET)检查设置结果
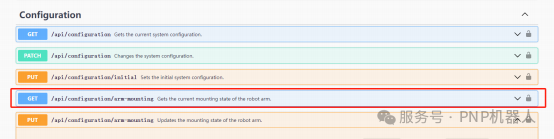
h.依次点击 Try it out 和 Execute
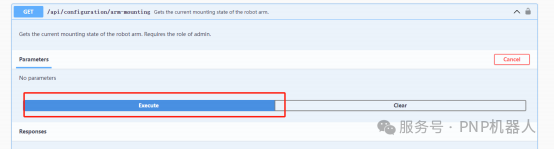
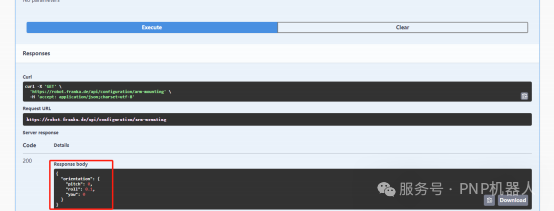
i.在此 API 对应的 Responses 部分。 从 Response body 处可以看到当前生效的安装角度。可以再次检查设置是否生效。
3.手动引导测试
a. 回到 Desk 界面,并获取控制权限。 b.切换到编程模式并松开机器人刹车。c.准备进行拖动测试。
此时需提前扶住机器人手臂,避免错误的角度设置,造成引导时的异常移动。有条件可以两人协作。
d. 按下引导按钮并半按启用按钮(短暂接通后,快速松开), 在引导生效的瞬间,测试手臂 有无重力方向错误造成的异常飘移。
e.如果上述测试,未发现异常,再延长手动引导的时间,测试机械臂手动引导是否正常。