CAN通信
1. CAN简介
CAN(Controller Area Network)是一种由德国Bosch公司为汽车行业开发的多主机串行通信协议。
其核心优势包括实时性高、抗干扰强、支持多主通信、传输距离远、可靠性高等。
应用领域:
汽车电子(发动机、ABS、气囊等)
工业自动化
电梯、医疗设备、船舶、铁路信号等
2. CAN物理层介绍
2.1 总线拓扑图
CAN总线通常为线性总线结构,所有节点并联在一对双绞线上。
各节点通过CAN_H和CAN_L两根线通信。
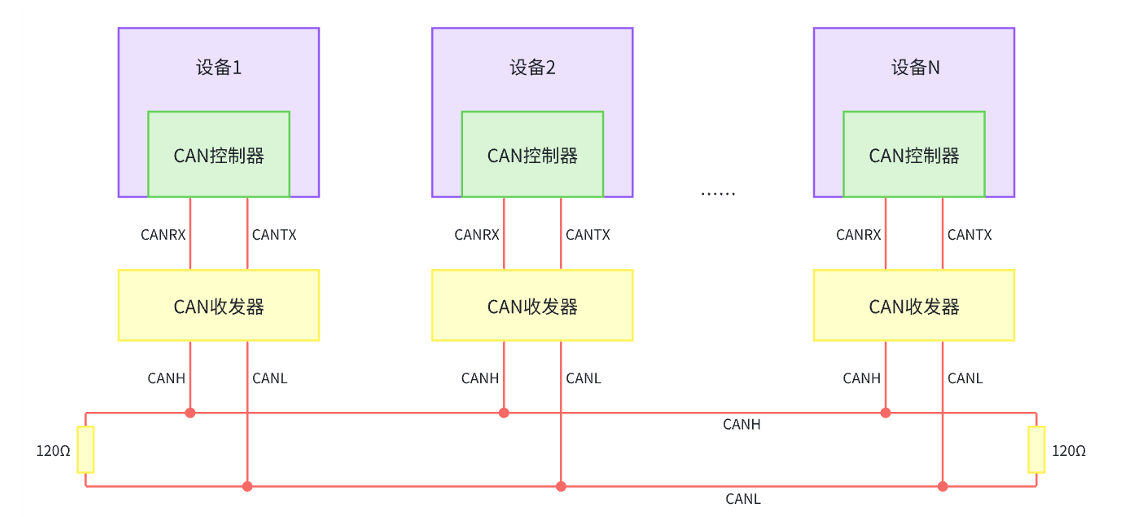
总线两端必须并联120Ω终端电阻,以防止信号反射。
2.2 电平标准
CAN_H空闲为2.5V,主发信时为3.5V
CAN_L空闲为2.5V,主发信时为1.5V
差分信号,抗干扰能力强
Dominant(显性):CAN_H > CAN_L,逻辑0
Recessive(隐性):CAN_H ≈ CAN_L,逻辑1
2.3 CAN控制器与收发器
控制器:实现协议层功能(帧格式、仲裁、校验、滤波、缓冲等)
收发器:将控制器TTL信号转换为CAN总线电平
典型硬件结构:
MCU <--> CAN控制器 <--> CAN收发器 <--> 总线(如STM32内部集成) (如TJA1050)
3. CAN协议层介绍
3.1 CAN帧种类
数据帧(Data Frame):实际传输数据
远程帧(Remote Frame):请求特定节点发送数据
错误帧(Error Frame):报错
过载帧(Overload Frame):节点无法及时处理数据
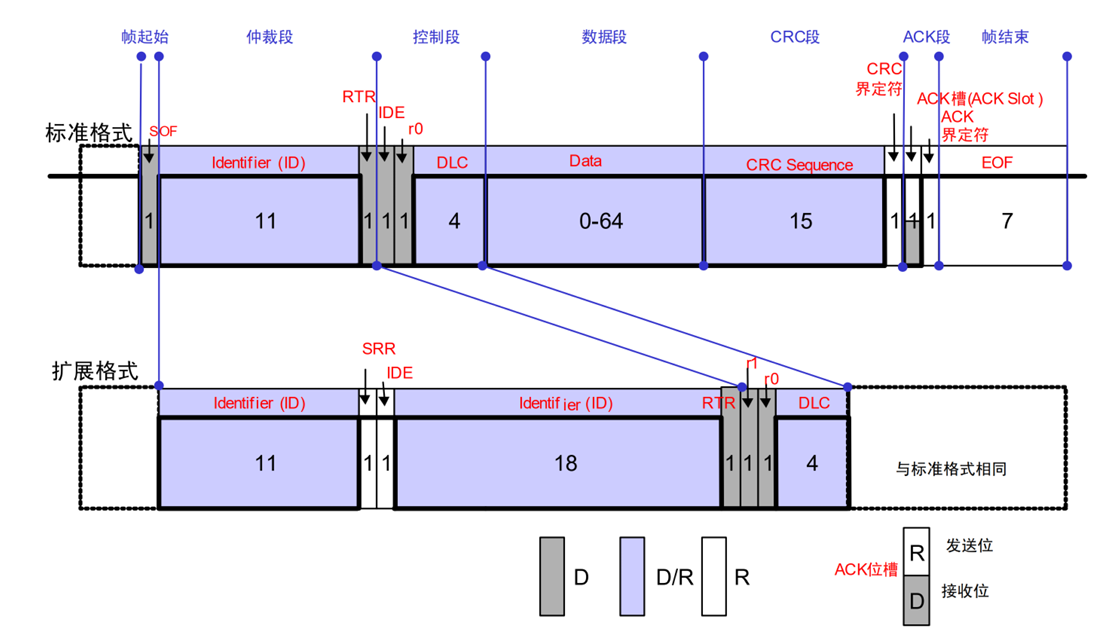
3.2 CAN数据帧结构
标准帧(11位ID)/扩展帧(29位ID)
数据段最大8字节。
graph LR
A[帧起始] --> B[仲裁字段(ID+RTR)] --> C[控制字段] --> D[数据段] --> E[CRC] --> F[ACK] --> G[帧结束]
字段详解:
起始位:1位,逻辑0
仲裁字段:ID+远程请求位
控制字段:数据长度(0~8字节)
数据段:实际数据
CRC:循环冗余校验
ACK:应答
结束位:7位隐性
3.3 CAN位时序
1位时间分为同步段、传播段、相位缓冲段1、相位缓冲段2
波特率常见有1Mbps, 500kbps, 250kbps等
总线长度与速率成反比(长距离选低速)
3.4 CAN仲裁机制
基于标识符ID优先级(ID越小优先级越高)
多主机发送冲突自动解决,优先级高的继续发送
4. STM32 CAN控制器介绍
4.1 CAN控制器介绍
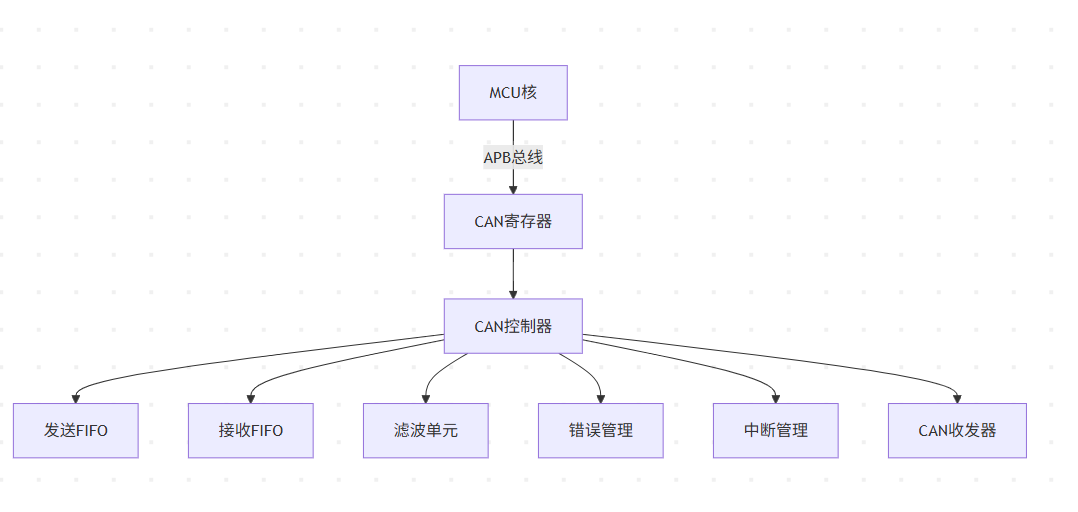
STM32通常内部集成了CAN控制器(如bxCAN)。
支持标准帧、扩展帧、过滤、FIFO、硬件自动重发等。
4.1 CAN控制器模式
正常模式(Normal):正常收发
回环模式(Loopback):自发自收,用于测试
静默模式(Silent):只收不发,用于总线监控
回环+静默:自发自收且不影响总线
4.2 CAN控制器框图
5. CAN寄存器及库函数介绍
主要寄存器:
CAN_MCR:主控制寄存器
CAN_MSR:主状态寄存器
CAN_TSR:发送状态寄存器
CAN_RF0R/1R:接收FIFO寄存器
CAN_IER:中断使能寄存器
CAN_ID、CAN_FxR:滤波器配置
HAL库/Std库/裸寄存器三种开发方式
常用API示例(HAL库为例):
CAN_TxHeaderTypeDef TxHeader;
uint8_t TxData[8] = {0};
uint32_t TxMailbox;// 初始化配置
hcan.Instance = CAN1;
hcan.Init.Prescaler = 16; // 波特率
hcan.Init.Mode = CAN_MODE_NORMAL;
HAL_CAN_Init(&hcan);// 发送数据
TxHeader.DLC = 8;
TxHeader.IDE = CAN_ID_STD;
TxHeader.StdId = 0x321;
HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox);// 接收数据(中断/轮询)
HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData);
6. CAN基本驱动流程
典型CAN通信初始化与收发流程
// 1. 配置GPIO引脚为CAN功能
// 2. 配置CAN参数(波特率、模式等)
// 3. 配置CAN滤波器(使能/屏蔽特定ID)
// 4. 启动CAN模块
HAL_CAN_Start(&hcan1);
// 5. 使能中断(可选)
HAL_CAN_ActivateNotification(&hcan1, ...);
// 6. 发送数据
HAL_CAN_AddTxMessage(...);
// 7. 接收数据(轮询或中断)
注意:中断回调函数一般如下
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{// 处理接收到的数据
}
7. 其他知识点
7.1 CAN滤波器配置
作用:只让关心的ID帧进入接收FIFO,减轻CPU负担
配置方式:屏蔽位、掩码位
例:只接收ID为0x123的数据帧
CAN_FilterTypeDef canFilter;
canFilter.FilterIdHigh = 0x123 << 5;
canFilter.FilterMaskIdHigh = 0x7FF << 5;
canFilter.FilterScale = CAN_FILTERSCALE_32BIT;
canFilter.FilterMode = CAN_FILTERMODE_IDMASK;
canFilter.FilterBank = 0;
canFilter.FilterActivation = ENABLE;
HAL_CAN_ConfigFilter(&hcan1, &canFilter);
7.2 错误管理与调试
典型错误:Acknowledge Error、Bit Error、Stuff Error等
常见调试思路:检查波特率、终端电阻、滤波器、收发器芯片、连线
7.3 多主多节点通信机制
同时多节点可发,利用仲裁避免冲突
ID优先级机制示例
8. 常见应用与技巧
CANopen、DeviceNet等高层协议
总线负载率计算
常见硬件问题排查法
9. 总结
CAN是现代汽车与工业现场的主流总线之一,实际项目中需熟悉协议、硬件配置、MCU代码实现与调试要点。
波特率的计算
一、CAN波特率的计算原理
CAN总线的波特率(Baud rate)= 1 bit传输所需时间的倒数。
CAN通信中**1位时间(Bit Time)**由多个时段组成:
同步段(Sync_Seg):固定为1个时间单元
传播段(Prop_Seg):信号传播延时补偿
相位缓冲段1(Phase_Seg1)
相位缓冲段2(Phase_Seg2)
STM32常用的CAN模块内部的时钟(f_CANclk)通常来自APB1外设时钟,比如36MHz、42MHz等。
波特率公式如下:
波特率 = f_CANclk / ((Prescaler) × (Sync_Seg + Prop_Seg + Phase_Seg1 + Phase_Seg2))
其中:
Prescaler:分频系数(整型,寄存器设置)
Sync_Seg:同步段(固定为1)
Prop_Seg:传播段(1~8)
Phase_Seg1:相位缓冲段1(1~8)
Phase_Seg2:相位缓冲段2(1~8)
STM32中的术语(HAL库结构体):
Prescaler—— 分频系数TimeSeg1—— Prop_Seg + Phase_Seg1TimeSeg2—— Phase_Seg2
二、例子
1.目标
f_CANclk:CAN模块时钟频率,这里为36 MHz
目标波特率:500 kbps
Prescaler:6(分频系数,寄存器设定的值,实际分频为6)
TimeSeg1:13 TQ(包含传播段+相位缓冲段1,寄存器直接设置为13)
TimeSeg2:2 TQ(相位缓冲段2,寄存器直接设置为2)
一个比特的总时间TQ数:Sync_Seg + TimeSeg1 + TimeSeg2 = 1 + 13 + 2 = 16 TQ
2. 计算公式
CAN波特率公式如下:
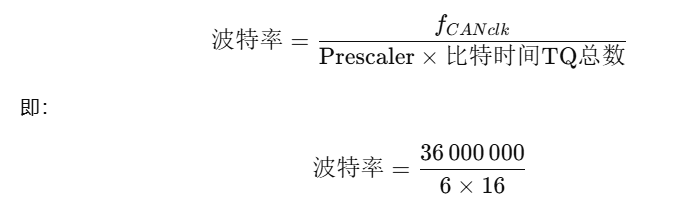
3. 具体计算过程
这里结果为375 kbps.
4. 推导500kbps配置
我们用同样的方法,反推500kbps的参数(TQ=16):
分频只能是整数,所以在36MHz时,TQ=16时无法整除出500kbps。
如果Prescaler取4,波特率= 36,000,000 / (4*16) = 562,500 bps
如果Prescaler取5,波特率= 36,000,000 / (5*16) = 450,000 bps
所以,在36MHz下要精确得到500kbps,TQ数需重新调整!
5. 最佳500kbps配置方法
常见办法1:调TQ(比特宽度)
如果TQ=12,则

这时:
Prescaler=6
Sync_Seg=1,TimeSeg1+TimeSeg2=11(比如TimeSeg1=9, TimeSeg2=2)
此时就可以实现500kbps波特率!
6. 代码配置举例(500kbps, 36MHz时钟,TQ=12)
hcan1.Init.Prescaler = 6;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_9TQ; // PropSeg+PhaseSeg1=9
hcan1.Init.TimeSeg2 = CAN_BS2_2TQ; // PhaseSeg2=2
1 + 9 + 2 = 12TQ,总线速率 = 36MHz / (6*12) = 500,000 bps
| f_CANclk (MHz) | Prescaler | TimeSeg1 | TimeSeg2 | Bit time(TQ) | 波特率 (bps) |
|---|---|---|---|---|---|
| 36 | 6 | 9 | 2 | 12 | 500,000 |
| 36 | 12 | 9 | 2 | 12 | 250,000 |
| 36 | 24 | 9 | 2 | 12 | 125,000 |
STM32 HAL库典型配置
CAN_HandleTypeDef hcan1;hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 6; // 分频系数
hcan1.Init.Mode = CAN_MODE_NORMAL; // 正常模式
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_9TQ; // 9TQ
hcan1.Init.TimeSeg2 = CAN_BS2_2TQ; // 2TQ
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = ENABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;if (HAL_CAN_Init(&hcan1) != HAL_OK)
{// 错误处理
}
7.实用小结
推荐使用CubeMX自动生成配置,避免计算错误。
如果手动写代码,优先保证 Prescaler × (Sync_Seg + Prop_Seg + Phase_Seg1 + Phase_Seg2) 能整除 f_CANclk,并且 TQ 一般在8~25之间,推荐16TQ。
不同芯片的
CAN_BS1、CAN_BS2含义略有差异,查手册。确保主频、分频、段宽参数设定正确,否则收发可能会出现不可预知的错误!
实验:
正常模式:两个CAN设备实现收发。
main.c
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "uart1.h"
#include "can.h"
#include "key.h" uint8_t data_send[8] = {0x11, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77, 0x88}; // 发送数据缓存
uint8_t data_receive[8]; // 接收数据缓存int main(void)
{HAL_Init(); // 初始化HAL库stm32_clock_init(RCC_PLL_MUL9); // 设置系统时钟为72MHzled_init(); // 初始化LEDuart1_init(115200); // 初始化串口1,波特率115200can_init(); // 初始化CAN控制器key_init(); // 初始化按键扫描printf("hello world!\r\n"); // 启动提示信息uint8_t i = 0;while(1){ if(key_scan() == 1) // 检查按键是否被按下(返回1表示按下){for(i = 0; i < 8; i++)data_send[i]++; // 发送内容自增,便于区分多次发送的数据can_send_data(0x12345678, data_send, 8); // 发送8字节数据,扩展帧ID为0x12345678}can_receive_data(data_receive); // 检查是否有数据接收,有则读取到data_receive}
}
can.c
#include "can.h"
#include "stdio.h"CAN_HandleTypeDef can_handle = {0}; // CAN控制器句柄// ===========================
// CAN初始化
// ===========================
void can_init(void)
{can_handle.Instance = CAN1; // 选择CAN1模块can_handle.Init.Mode = CAN_MODE_NORMAL; // 设置CAN模式// CAN_MODE_NORMAL: 正常工作模式// CAN_MODE_LOOPBACK: 回环自测模式(自发自收,不上总线)// CAN_MODE_SILENT: 静默模式(只收不发)// CAN_MODE_SILENT_LOOPBACK: 静默回环模式(自测且不影响总线)can_handle.Init.Prescaler = 4; // 分频系数,影响波特率can_handle.Init.TimeSeg1 = CAN_BS1_9TQ; // 时间段1(传播段+相位缓冲1),可选CAN_BS1_xTQ(x=1~16)can_handle.Init.TimeSeg2 = CAN_BS2_8TQ; // 时间段2(相位缓冲2),可选CAN_BS2_xTQ(x=1~8)can_handle.Init.SyncJumpWidth = CAN_SJW_1TQ; // 同步跳转宽度,CAN_SJW_1TQ~CAN_SJW_4TQcan_handle.Init.AutoBusOff = DISABLE; // 自动离线管理,ENABLE=自动进入BUS OFF,DISABLE=手动处理can_handle.Init.AutoRetransmission = DISABLE; // 自动重发,ENABLE=报文失败后自动重发can_handle.Init.AutoWakeUp = DISABLE; // 自动唤醒,ENABLE=休眠后有总线活动自动唤醒can_handle.Init.ReceiveFifoLocked = DISABLE; // FIFO锁定,ENABLE=FIFO满时新报文被丢弃,DISABLE=溢出后覆盖can_handle.Init.TimeTriggeredMode = DISABLE; // 时间触发模式,ENABLE=开启定时触发can_handle.Init.TransmitFifoPriority = DISABLE; // 发送优先级,ENABLE=按报文优先级,DISABLE=先到先发HAL_CAN_Init(&can_handle); // 初始化CAN硬件// ==============================// 配置CAN滤波器,决定哪些ID可以被接收// ==============================CAN_FilterTypeDef can_filterconfig = {0};can_filterconfig.FilterMode = CAN_FILTERMODE_IDMASK; // 滤波模式// CAN_FILTERMODE_IDMASK: 掩码模式,常用于接收一类ID// CAN_FILTERMODE_IDLIST: 列表模式,精确匹配指定IDcan_filterconfig.FilterScale = CAN_FILTERSCALE_32BIT; // 滤波宽度// CAN_FILTERSCALE_16BIT: 16位宽(可配置更多过滤器),CAN_FILTERSCALE_32BIT: 32位宽can_filterconfig.FilterIdHigh = 0; // 过滤器ID高16位(对应标准帧和扩展帧ID高位)can_filterconfig.FilterIdLow = 0; // 过滤器ID低16位can_filterconfig.FilterMaskIdHigh = 0; // 屏蔽位高16位,0表示不过滤can_filterconfig.FilterMaskIdLow = 0; // 屏蔽位低16位,0表示不过滤can_filterconfig.FilterBank = 0; // 过滤器编号(0~13)can_filterconfig.FilterFIFOAssignment = CAN_FILTER_FIFO0; // 分配到FIFO0// CAN_FILTER_FIFO0 或 CAN_FILTER_FIFO1can_filterconfig.FilterActivation = CAN_FILTER_ENABLE; // 启用过滤器can_filterconfig.SlaveStartFilterBank = 14; // 单CAN一般不用HAL_CAN_ConfigFilter(&can_handle, &can_filterconfig); // 设置过滤器HAL_CAN_Start(&can_handle); // 启动CAN模块
}// ===========================
// CAN底层硬件初始化,主要配置时钟和IO口
// ===========================
void HAL_CAN_MspInit(CAN_HandleTypeDef *hcan)
{__HAL_RCC_CAN1_CLK_ENABLE(); // 使能CAN1时钟__HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA时钟GPIO_InitTypeDef gpio_initstruct;gpio_initstruct.Pin = GPIO_PIN_12; // CAN1_TX (PA12)gpio_initstruct.Mode = GPIO_MODE_AF_PP; // 复用推挽输出gpio_initstruct.Pull = GPIO_PULLUP; // 上拉gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; // 高速HAL_GPIO_Init(GPIOA, &gpio_initstruct);gpio_initstruct.Pin = GPIO_PIN_11; // CAN1_RX (PA11)gpio_initstruct.Mode = GPIO_MODE_AF_INPUT; // 复用输入HAL_GPIO_Init(GPIOA, &gpio_initstruct);
}// ===========================
// 发送CAN数据帧
// 参数:
// id —— 报文ID(标准帧用StdId,扩展帧用ExtId)
// buf —— 8字节数据缓存
// len —— 数据长度(0~8)
// 可选参数:
// tx_header.IDE: CAN_ID_STD(标准帧),CAN_ID_EXT(扩展帧)
// tx_header.RTR: CAN_RTR_DATA(数据帧),CAN_RTR_REMOTE(远程帧)
// ===========================
void can_send_data(uint32_t id, uint8_t *buf, uint8_t len)
{CAN_TxHeaderTypeDef tx_header = {0}; // 发送报文头结构体uint32_t tx_mail = CAN_TX_MAILBOX0; // 发送邮箱,可为CAN_TX_MAILBOX0/1/2tx_header.ExtId = id; // 扩展帧IDtx_header.DLC = len; // 数据长度(0~8)tx_header.IDE = CAN_ID_EXT; // 扩展帧// CAN_ID_STD: 标准帧,tx_header.StdId = id// CAN_ID_EXT: 扩展帧,tx_header.ExtId = idtx_header.RTR = CAN_RTR_DATA; // 数据帧// CAN_RTR_DATA: 数据帧// CAN_RTR_REMOTE: 远程帧HAL_CAN_AddTxMessage(&can_handle, &tx_header, buf, &tx_mail); // 发送数据// 等待所有邮箱空闲(发送完毕再返回)while(HAL_CAN_GetTxMailboxesFreeLevel(&can_handle) != 3);// 打印调试信息uint8_t i = 0;printf("发送数据:\r\n");for(i = 0; i < len; i++)printf("%X ", buf[i]);printf("\r\n");
}// ===========================
// 接收CAN数据帧
// 参数:
// buf —— 用于存放接收到的数据
// 返回值:
// 实际接收到的数据字节数(0表示无数据)
// ===========================
uint8_t can_receive_data(uint8_t *buf)
{CAN_RxHeaderTypeDef rx_header = {0}; // 接收报文头结构体// 查询FIFO0接收缓冲区是否有数据if(HAL_CAN_GetRxFifoFillLevel(&can_handle, CAN_RX_FIFO0) == 0)return 0;HAL_CAN_GetRxMessage(&can_handle, CAN_RX_FIFO0, &rx_header, buf); // 读取数据uint8_t i = 0;printf("接收数据:\r\n");for(i = 0; i < rx_header.DLC; i++)printf("%X ", buf[i]);printf("\r\n");return rx_header.DLC; // 返回数据长度
}
can.h
#ifndef __CAN_H__
#define __CAN_H__#include "sys.h" // ========================
// 初始化CAN硬件与滤波器
// ========================
void can_init(void);// ========================
// 发送一帧CAN数据
// 参数:
// id —— 帧ID(标准帧/扩展帧均可)
// buf —— 数据缓存区
// len —— 数据长度(0~8字节)
// ========================
void can_send_data(uint32_t id, uint8_t *buf, uint8_t len);// ========================
// 接收一帧CAN数据
// 参数:
// buf —— 存放接收数据的缓存区
// 返回:
// 实际接收到的数据长度
// ========================
uint8_t can_receive_data(uint8_t *buf);#endif
回环模式:使用回环模式实现自发自收;
只用修改模式即可
can_handle.Init.Mode = CAN_MODE_LOOPBACK; // 设置CAN模式