Multi-View Stereo for Community Photo Collections
全局视图选择介绍
在SFM阶段计算的3D点(共有特征)是一个很好的指示,对于给定的视图R去找到与之相关的视图V,因为3D点源自于三角化,而三角化又来自于特征的匹配,那么如果两个视图存在匹配了,直接就说明两个视图之间存在重叠关系。
但是,两个视图之间存在共有的特征不能保证好的稠密重建的结果,两个视图之间存在很多的匹配的时候,往往的重叠度很高,这个时候一般两张图之间基线很小,基线小计算的视差误差就会偏大。此外,特征匹配一般是存在尺度不变性的,也就是大分辨率的视图可能和小分辨率的视图存在匹配,但是在稠密重建中,最好两张视图分辨率基本一样是最好的。因此作者给出了计算得分的方式,去评价两张视图去计算MVS的好坏。

如公式1所示,其中Fx是可以被视图X观测到的共有的特征,wN(f)![]() 是用于评估两个视图之间重叠度是否合适的函数,ws(f)
是用于评估两个视图之间重叠度是否合适的函数,ws(f)![]() 是两个视图分辨率是否合适的函数。
是两个视图分辨率是否合适的函数。
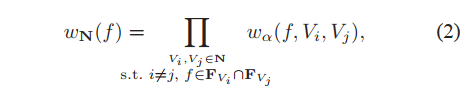
其中![]() ,其中α是视图Vi和Vj与对应的共同的特征点f (3D点)的夹角,也就是两个视图的相机中心与3D点坐标求得的向量,计算反余弦得到的夹角。其中αmax
,其中α是视图Vi和Vj与对应的共同的特征点f (3D点)的夹角,也就是两个视图的相机中心与3D点坐标求得的向量,计算反余弦得到的夹角。其中αmax![]() 在实验中设置为10度。二次函数用于抵消随着角度减小而出现的特征数量增加的趋势。
在实验中设置为10度。二次函数用于抵消随着角度减小而出现的特征数量增加的趋势。
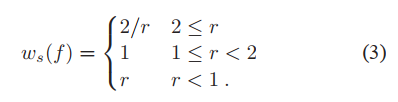
为了估计在特征点 f 附近,三维数据 V 的空间采样率,我们找一个以 f 为中心的球,使得它在图像 V 上投影的直径正好等于一像素的间距。这个球的实际三维直径 sV(f) 就代表了在该区域的采样间距(或说空间分辨率)。其中![]() 。在实际的计算中,sR(f)
。在实际的计算中,sR(f)![]() 等于对应的图像的焦距F除以对应的3D点的深度。如公式所示,对应的分辨率的比值在1-2之间时,得分是最高的1,也就是说两张图像的分辨率越相近,得分越高。
等于对应的图像的焦距F除以对应的3D点的深度。如公式所示,对应的分辨率的比值在1-2之间时,得分是最高的1,也就是说两张图像的分辨率越相近,得分越高。
具体的代码可以参考openMVS,如链接所示:
https://github.com/cdcseacave/openMVS/blob/e134eb4430b73cd14077f73a0ace297b61f942b6/libs/MVS/Scene.cpp#L835