复合机器人:纠偏算法如何重塑工业精度与效率?
在智能制造领域,复合机器人正成为柔性生产与高精度作业的核心载体。面对“复合机器人有纠偏算法吗?”这一行业高频问题,富唯智能以多模态纠偏技术体系给出了答案——通过自研的AI驱动纠偏算法与多传感器融合方案,复合机器人不仅能应对复杂环境下的动态偏差,更将定位精度推升至行业新高度,为汽车制造、CNC加工、新能源产线等场景提供智能化解决方案。

一、纠偏算法:从“被动响应”到“主动预判”
传统工业场景中,环境干扰、设备振动、负载变化等因素常导致机器人作业偏移,而富唯智能复合机器人通过三层纠偏架构实现精度跃升:
1.视觉动态校准:搭载自研ForwardVision 3D视觉系统(±0.02mm精度),实时扫描工件轮廓与目标位置偏差,结合深度学习算法预判偏移趋势,实现毫米级动态修正。
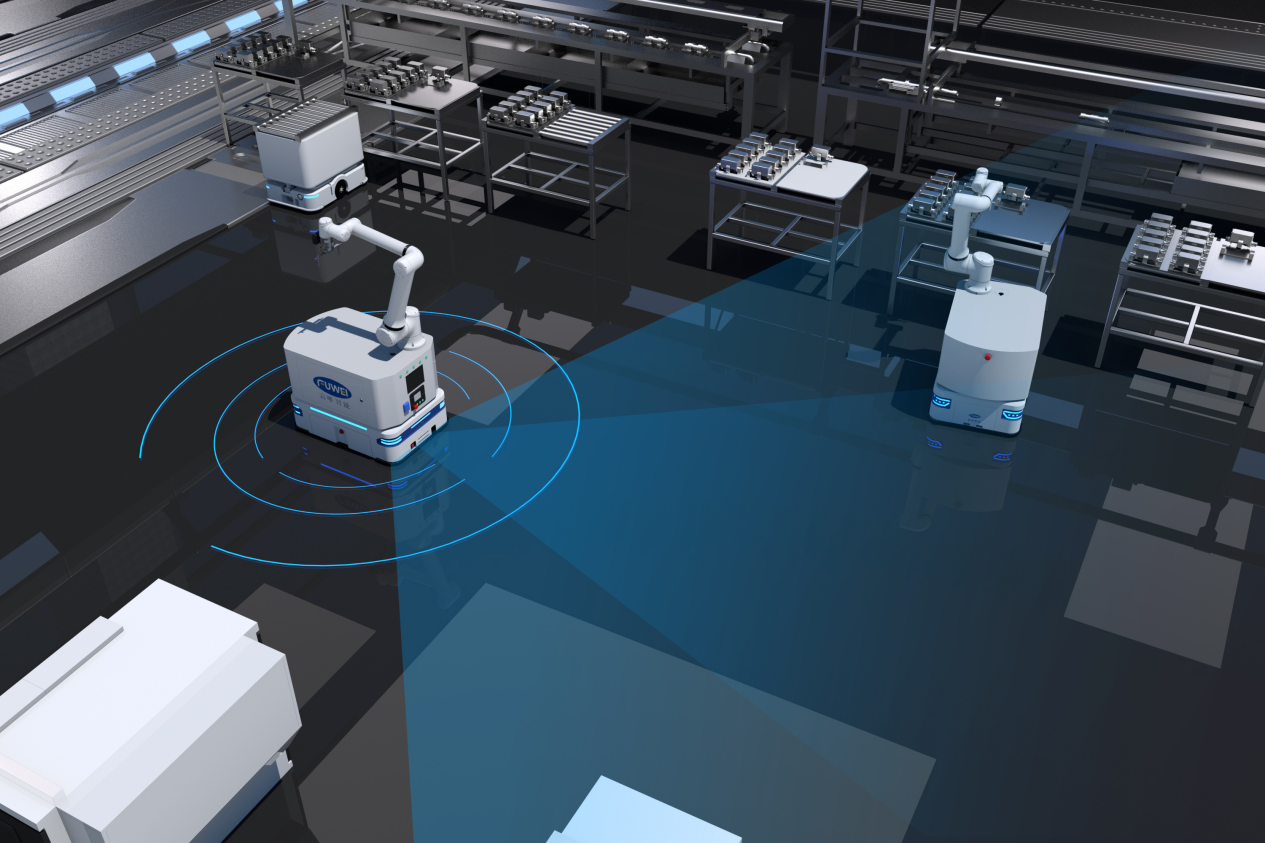
2.多传感器融合:集成激光雷达、力控模块与惯性导航系统,通过数据融合技术消除单一传感器误差。例如,在汽车发动机装配中,机器人可同步感知机械臂末端受力与底盘移动姿态,确保搬运路径零偏移。
3.AI-ICDP智能调度:基于实时生产数据,系统动态调整纠偏参数。如某CNC加工案例中,机器人通过历史误差数据分析,将上下料节拍从18秒优化至15秒,纠偏响应延迟低于50ms。
二、行业痛点破解:纠偏算法的实战价值
富唯智能复合机器人纠偏算法已在多领域验证其效能:
1.精密电子装配:针对芯片抓取中因静电导致的微米级偏移,机器人通过力-视觉混合纠偏技术,将误放率降至0.001%,良品率提升至99.9%。
2.光伏板清洁:借鉴分体式机器人轨迹纠偏专利,富唯复合机器人在光伏板清扫中实现挂车与主体车同步控制,偏移量≤2mm,适应复杂地形。
三、技术突破:从单点纠偏到系统级容错
富唯智能的纠偏算法不仅关注局部精度,更构建了系统级容错机制:
1.自适应学习模型:机器人通过数字孪生预演纠偏过程,积累偏差数据并优化算法参数。某新能源电池产线部署后,整体纠偏效率提升50%。
2.故障自愈设计:当传感器异常或通讯中断时,系统自动切换至冗余纠偏模式。例如,在胶箱搬运场景中,视觉定位失效后,机器人可依赖惯性导航继续作业,误放率仍保持≤0%。
3.绿色纠偏策略:通过能耗优化算法,在保证精度的同时将纠偏功耗降低20%,助力企业实现低碳目标。
“复合机器人有纠偏算法吗?”——富唯智能以技术创新重新定义这一问题。从视觉动态校准到多传感器融合,从AI预判到系统容错,每一次纠偏都在为工业精度树立新标杆。选择富唯,即是选择以智能算法为引擎,将生产偏差转化为竞争势能,在智能制造浪潮中抢占先机!