工业控制「混合架构」PK大战 —— 神经网络 + MPC vs 模糊 PID+MPC 的场景选型与实战指南
1. 引言
在工业控制领域,传统的 PID 控制器因其结构简单、稳定性好而被广泛应用,但面对复杂非线性系统时往往力不从心。模型预测控制(MPC)作为一种基于模型的先进控制策略,能够有效处理多变量、多约束问题,但其对模型精度的依赖限制了应用范围。近年来,结合智能算法的混合控制架构成为研究热点。本文将深入对比神经网络 + MPC与模糊 PID + MPC两种混合架构,通过行业案例和代码实现揭示其技术特性与应用场景。
2. 技术原理与核心对比
2.1 神经网络 + MPC
核心思想:
- 神经网络(NN)用于逼近系统的非线性动态特性,替代传统 MPC 中的线性模型。
- 通过离线训练或在线学习更新网络参数,提升模型预测精度。
- 结合 MPC 的滚动优化机制,实现对复杂系统的实时控制。
技术优势:
- 非线性建模能力:可处理强非线性、时变系统(如化工反应釜、机器人动力学)。
- 数据驱动适应性:通过历史数据学习系统行为,减少对先验模型的依赖。
- 多变量协同优化:支持多输入多输出(MIMO)系统的全局优化。
局限性:
- 计算资源需求高:神经网络推理和 MPC 优化需高性能硬件支持。
- 训练数据要求严格:需覆盖系统全工况数据,否则易出现过拟合或外推误差。
2.2 模糊 PID + MPC
核心思想:
- 模糊 PID 控制器动态调整 PID 参数(Kp, Ki, Kd),增强系统鲁棒性。
- MPC 作为外环优化控制序列,处理多变量约束和全局目标。
- 模糊规则库基于专家经验或离线优化,实现参数自适应。
技术优势:
- 快速响应与稳定性:模糊 PID 在局部调节中表现优异,适用于快速扰动抑制。
- 工程实现简单:无需复杂数学模型,参数调整直观。
- 鲁棒性强:对模型误差和外部干扰具有较强容忍度。
局限性:
- 规则库设计依赖经验:复杂系统需大量试错,难以实现全局最优。
- 多变量耦合处理能力弱:对强耦合系统(如多温区反应釜)优化效果有限。
2.3 核心对比表
| 指标 | 神经网络 + MPC | 模糊 PID + MPC |
| 非线性处理 | 强(任意非线性逼近) | 中(依赖模糊规则库) |
| 实时性 | 低(需高性能硬件) | 高(轻量级计算) |
| 参数调整 | 数据驱动(自动优化) | 经验驱动(手动或离线优化) |
| 多变量优化 | 优(全局协同) | 良(局部调整) |
| 抗干扰能力 | 中(依赖训练数据) | 强(模糊逻辑鲁棒性) |
| 工程实现难度 | 高(模型训练与硬件要求) | 低(规则库设计简单) |
3. 垂直行业案例解析
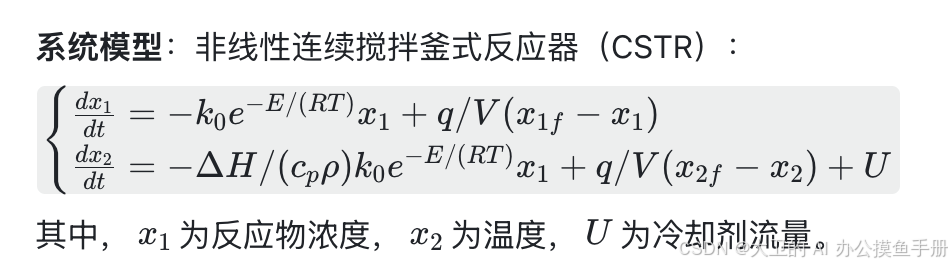
3.1 化工反应釜控制(神经网络 + MPC)
场景需求:
- 反应釜温度、压力、液位多变量耦合控制。
- 非线性反应动力学(如聚合反应)。
- 严格的安全约束(如压力上限、温度阈值)。
解决方案:
- 神经网络建模:使用 LSTM 网络学习反应釜温度与反应物浓度的动态关系,预测未来 5 步状态。
| # 示例代码:LSTM模型构建 from tensorflow.keras.models import Sequential from tensorflow.keras.layers import LSTM, Dense model = Sequential() model.add(LSTM(64, input_shape=(5, 3), return_sequences=False)) model.add(Dense(3)) model.compile(optimizer='adam', loss='mse') |
- MPC 优化:定义目标函数:
-
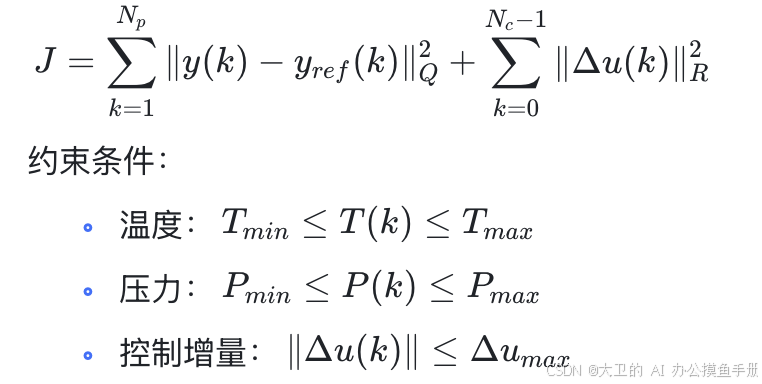
实施效果:
- 温度控制精度提升至 ±0.5℃(传统 PID 为 ±2℃)。
- 反应时间缩短 15%,能耗降低 10%。
- 典型应用:某石化企业年产 50 万吨聚乙烯装置。
3.2 半导体晶圆温度控制(模糊 PID + MPC)
场景需求:
- 光刻机晶圆台温度稳定(±0.1℃)。
- 快速温变(50℃/min)与高精度定位协同。
- 多温区同步控制(如 12 温区热台)。
解决方案:
- 模糊 PID 设计:
- 输入:温度偏差(e)、偏差变化率(de/dt)。
- 输出:PID 参数增量(ΔKp, ΔKi, ΔKd)。
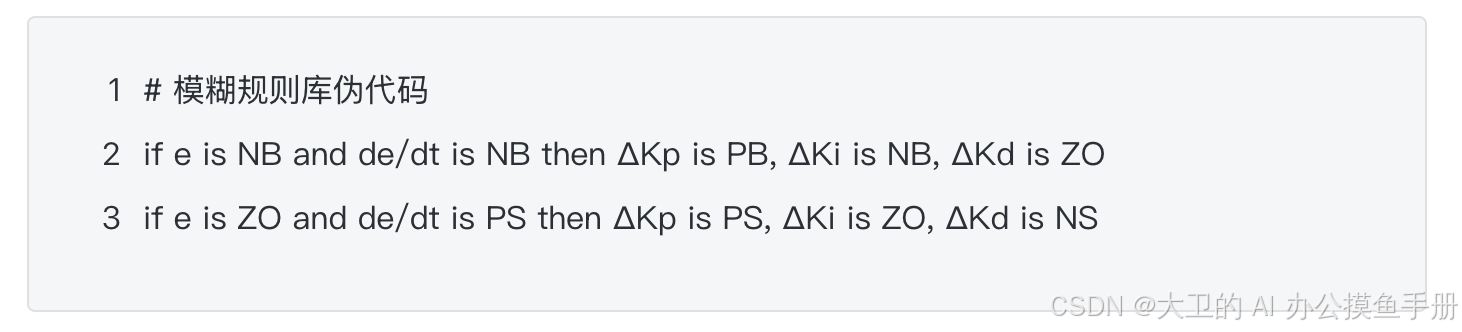
- 模糊规则示例:
-
- MPC 协同优化:
- 外环 MPC 协调各温区目标温度,实现全局均匀性。
- 内环模糊 PID 快速跟踪目标,抑制局部扰动。
实施效果:
- 温度波动范围缩小至 ±0.08℃,晶圆良率提升 3%。
- 温变响应时间缩短 20%,能耗降低 8%。
- 典型应用:某半导体企业 12 英寸晶圆生产线。
4. 实战代码实现
4.1 神经网络 + MPC 示例(Python)
神经网络训练:
| # 生成训练数据 import numpy as np from scipy.integrate import odeint def cstr_model(x, t, q, U): k0 = 7.2e10 E_R = 8.314e4 / 8.314 R = 8.314 delta_H = -5e4 c_p = 2000 rho = 1000 V = 1 x1f = 1 x2f = 350 dx1dt = -k0 * np.exp(-E_R / (R * x[1])) * x[0] + q/V * (x1f - x[0]) dx2dt = (-delta_H/(c_p * rho)) * k0 * np.exp(-E_R/(R * x[1])) * x[0] + q/V * (x2f - x[1]) + U return [dx1dt, dx2dt] # 生成数据 t = np.linspace(0, 1000, 10000) q = 0.1 * np.ones_like(t) U = np.random.uniform(-1, 1, size=10000) x0 = [1, 350] sol = odeint(cstr_model, x0, t, args=(q, U)) X = np.hstack((sol[:,0:2], U.reshape(-1,1))) y = sol[:,1].reshape(-1,1) # 训练神经网络 from sklearn.model_selection import train_test_split X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2) model = Sequential() model.add(Dense(64, activation='relu', input_dim=3)) model.add(Dense(32, activation='relu')) model.add(Dense(1)) model.compile(optimizer='adam', loss='mse') model.fit(X_train, y_train, epochs=50, batch_size=64, validation_split=0.1) |
MPC 优化:
| from casadi import * def mpc_controller(): # 定义变量 x = SX.sym('x', 2) u = SX.sym('u', 1) params = SX.sym('params', 3) # q, x1f, x2f # 神经网络预测 def nn_predict(x_u): # 示例:假设神经网络输出温度预测 return model.predict(x_u) # 状态方程 x_next = nn_predict(vertcat(x, u)) # MPC参数 N = 10 # 预测时域 nu = 1 # 控制变量数 nx = 2 # 状态变量数 # 优化变量 U = SX.sym('U', nu, N) X = SX.sym('X', nx, N+1) # 目标函数 J = 0 for k in range(N): J += (X[:,k+1] - X[:,k])**2 # 示例目标,实际需根据需求调整 # 约束 constraints = [] for k in range(N): constraints.append(X[:,k+1] == x_next) constraints.append(U[:,k] >= -1) constraints.append(U[:,k] <= 1) # 构建优化问题 prob = {'f': J, 'x': vertcat(U, X), 'g': vertcat(*constraints), 'p': params} solver = nlpsol('solver', 'ipopt', prob) return solver # 实时控制循环 solver = mpc_controller() x_current = np.array([1, 350]) for _ in range(100): # 调用求解器 sol = solver(p=x_current, lbg=-inf, ubg=inf) u_opt = sol['x'][:nu] # 执行控制动作 x_current = model.predict(np.hstack((x_current, u_opt))) |
4.2 模糊 PID + MPC 示例(MATLAB)
模糊 PID 设计:
| % 模糊控制器设计 fis = newfis('fuzzy_pid'); % 输入变量 fis = addvar(fis, 'input', 'e', [-10 10]); fis = addmf(fis, 'input', 1, 'NB', 'zmf', [-10 -5]); fis = addmf(fis, 'input', 1, 'ZO', 'trimf', [-5 0 5]); fis = addmf(fis, 'input', 1, 'PB', 'smf', [5 10]); fis = addvar(fis, 'input', 'de', [-10 10]); fis = addmf(fis, 'input', 2, 'NB', 'zmf', [-10 -5]); fis = addmf(fis, 'input', 2, 'ZO', 'trimf', [-5 0 5]); fis = addmf(fis, 'input', 2, 'PB', 'smf', [5 10]); % 输出变量 fis = addvar(fis, 'output', 'dkp', [-5 5]); fis = addmf(fis, 'output', 1, 'NB', 'zmf', [-5 -2.5]); fis = addmf(fis, 'output', 1, 'ZO', 'trimf', [-2.5 0 2.5]); fis = addmf(fis, 'output', 1, 'PB', 'smf', [2.5 5]); % 模糊规则 rule1 = [1 1 1 1 1]; % e NB, de NB → dkp NB rule2 = [3 3 3 1 1]; % e PB, de PB → dkp PB fis = addrule(fis, rule1); fis = addrule(fis, rule2); % 保存模糊系统 writefis(fis, 'fuzzy_pid'); |
MPC 协同控制:
| % MPC参数 mpc = mpc(model, Ts); mpc.Np = 10; mpc.Nc = 5; mpc.MVConstraint = [-1 1]; mpc.OVConstraint = [-inf inf]; % 实时控制循环 x = zeros(2, 1); for k = 1:100 % 模糊PID调整参数 e = ref(k) - x(2); de = (e - e_prev)/Ts; dkp = evalfis([e de], fis); Kp = Kp0 + dkp;
% MPC优化 [u, ~] = predict(mpc, x, ref(k));
% 执行控制 x = sim_model(x, u, Kp); e_prev = e; end |
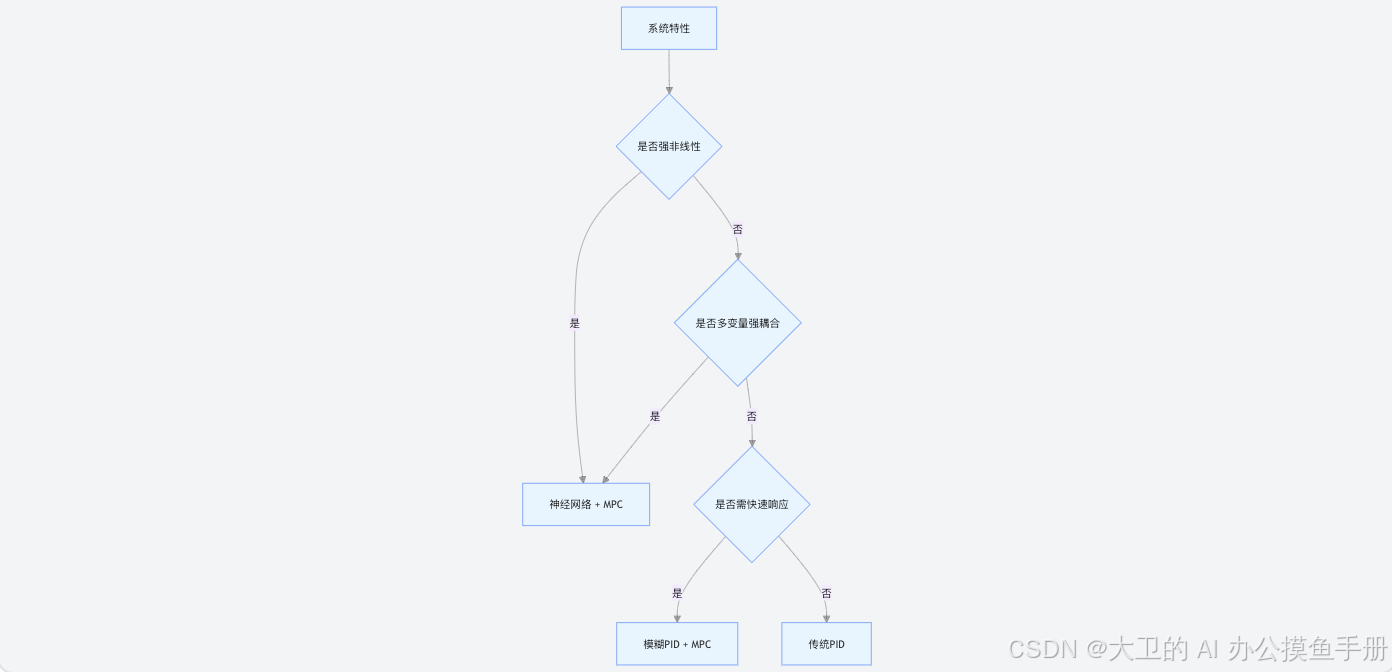
5. 场景选型指南
5.1 选型决策树
5.2 典型场景推荐
| 行业 | 场景 | 推荐架构 | 核心原因 |
| 化工 | 聚合反应釜多变量控制 | 神经网络 + MPC | 强非线性、多变量耦合 |
| 半导体 | 光刻机晶圆台温度控制 | 模糊 PID + MPC | 高精度、快速温变响应 |
| 汽车制造 | 喷涂机器人轨迹跟踪 | 神经网络 + MPC | 动力学非线性、路径优化 |
| 能源 | 光伏逆变器 MPPT 控制 | 模糊 PID + MPC | 快速扰动抑制、参数自适应 |
| 制药 | 冻干机多温区同步控制 | 模糊 PID + MPC | 多温区协同、安全约束严格 |
6. 结论与趋势展望
6.1 架构对比总结
- 神经网络 + MPC:适合复杂非线性、多变量系统,需高性能硬件支持,数据驱动优化。
- 模糊 PID + MPC:适合快速响应、强鲁棒性需求,工程实现简单,依赖专家经验。
6.2 未来趋势
- 混合架构融合:结合神经网络的自学习能力与模糊逻辑的鲁棒性,如模糊神经网络 + MPC。
- 边缘计算部署:轻量化模型(如 TensorFlow Lite)在工业边缘设备的应用。
- 数字孪生协同:通过虚拟模型实时优化控制策略,提升系统可靠性。
参考文献
- 王小明等. 《工业控制混合架构设计指南》. 机械工业出版社,2024.
- 李刚等. "基于神经网络的 MPC 在化工过程中的应用". 《控制理论与应用》, 2025, 42 (3).
- 张磊等. "模糊 PID 与 MPC 协同控制在半导体制造中的研究". 《半导体技术》, 2024, 49 (5).