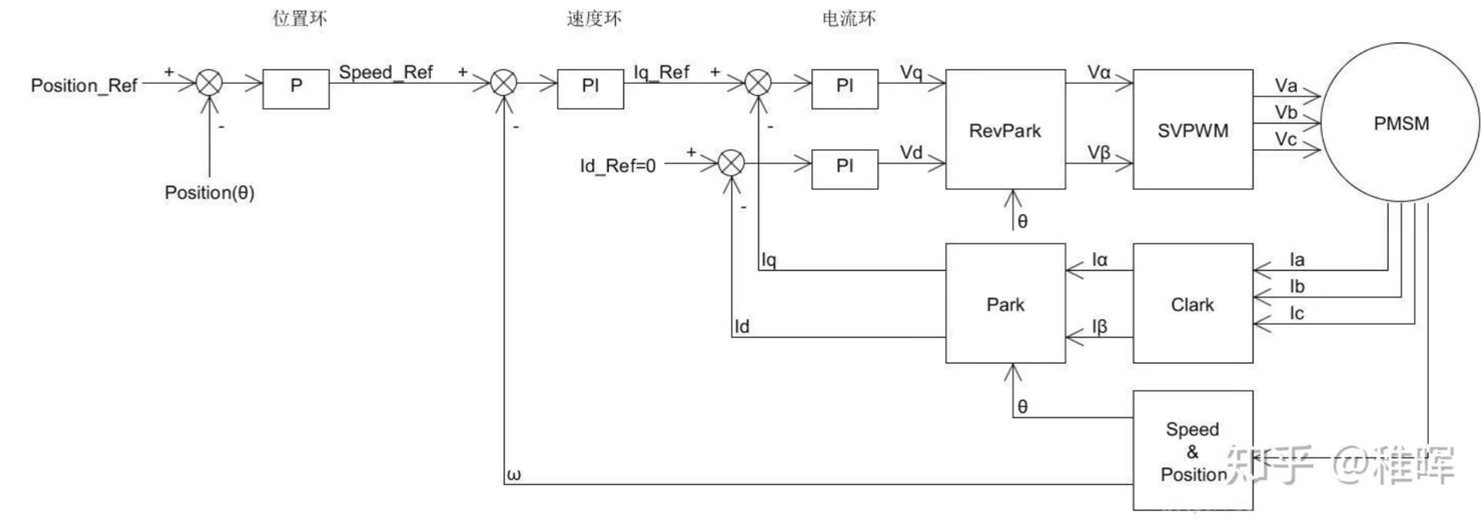
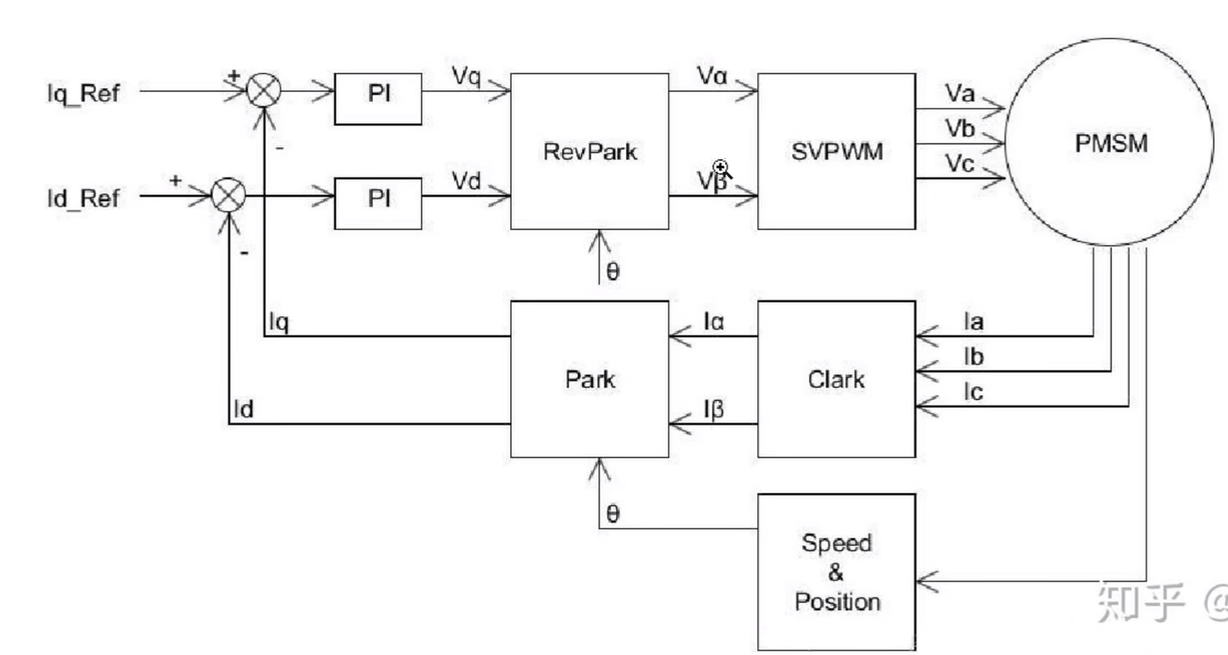
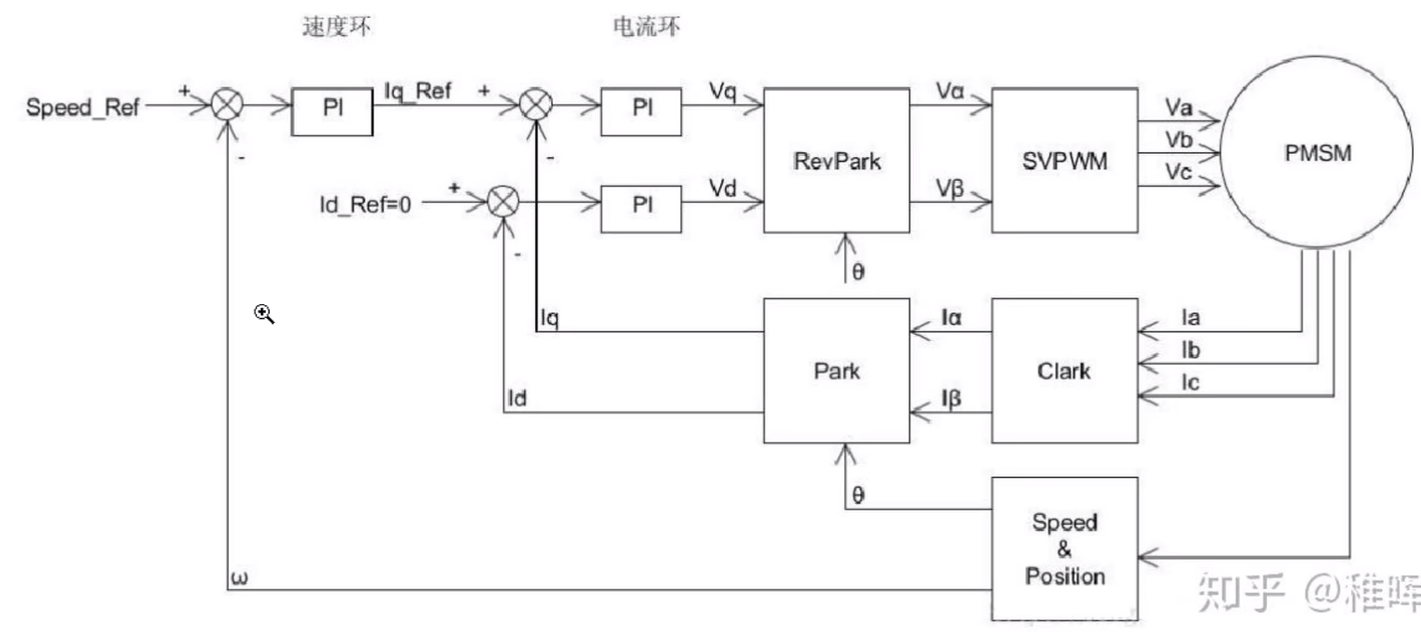
当前位置: 首页 > web >正文 FOC电机三环控制 web 2025/6/19 18:23:49 本文学习自嵌入式crafter的视频,讲解FOC电机三环控制如何组成力矩、速度、位置控制模式 力矩模式 力矩越大,电流越大,用到电流环 速度模式 包含电流环和速度环。无人机的旋桨 位置模式 三环嵌套 查看全文 http://www.xdnf.cn/news/13832.html 相关文章: aws s3 sdk c++使用指南、适配阿里云oss和aws 「Java EE开发指南」如何用MyEclipse创建一个WEB项目?(一) DDcGAN_codes 【python】执行deactivate没有关闭虚拟环境 交易所 java, web3 交易所简易模块 [SKE]CPU 与 GPU 之间数据加密传输的认证与异常处理 【线程与线程池】线程数设置(四) 线程池启动报null :Caused by: java.lang.IllegalArgumentException: null 每日学习一道数模题-2024国赛B题-生产过程中的决策问题 ViT架构所需的大型训练集 在 IntelliJ IDEA 中运行时出现“Log already in use? tmlog in ./“ Python数据可视化艺术:社交网络关系图制作 parquet批量读取图片文件示例 树莓派5 ubuntu 24.04 docker配置镜像Docker pull时报错:https://registry-1.docker.io/v2/ 机器学习与深度学习21-信息论 项目名称:基于计算机视觉的夜间目标检测系统 map与set的模拟实现 ABAP零碎记录 事件(Event) 56、原生组件注入-原生注解与Spring方式注入 录制mp4 rospy 数字人分身系统源码开发功能深度解析 基于算力魔方与PP-OCRv5的OpenVINO智能文档识别方案 CSS实现元素撑满剩余空间的5种方法 Linux启动流程和内核管理自我总结 杭州公司一面java题目和解答 2025最新版使用VSCode和CMake图形化编译调试Cuda C++程序(保姆级教学) IOT集群扩容实践:问题剖析与解决策略 Vue 3.6前瞻:响应式性能革命与Vapor模式展望 c#.net code httpPost请求,携带文件