摩擦非线性随动电机位置误差控制系统
摩擦非线性随动电机位置误差控制系统如下图,图中Kd为传动系数,Tem为机电时间常数。摩擦是一种典型的非线性环节,它表现为三种情形:一是静摩擦,二是库仑摩擦、三是黏性摩擦。静摩擦是阻碍静止物体产生运动趋势的阻力,一旦物体开始运动,静摩擦即消失,代之以动摩擦(库仑摩擦+黏性摩擦),动摩擦为F0+bω,F0为常数。用相平面分析低速爬行效应产生的机理,给出降低或消除这种效应的策略。
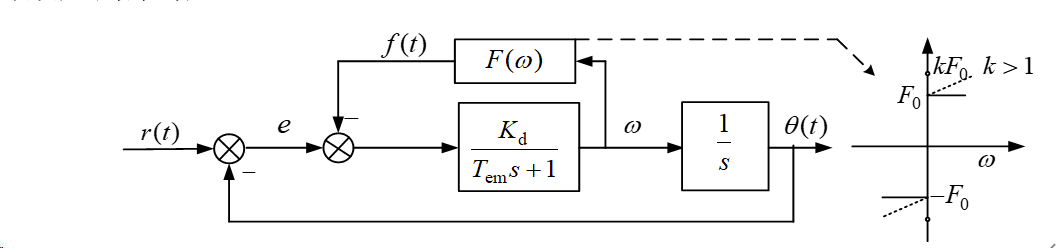

摩擦力的表达式为:
F f = { F s , ω = 0 , ∣ F 外 ∣ < F s F 0 ⋅ sgn ( ω ) + b ω , ω ≠ 0 F_f = \begin{cases} F_s, & \omega = 0, |F_{外}| < F_s \\ F_0 \cdot \text{sgn}(\omega) + b\omega, & \omega \neq 0 \end{cases} Ff={Fs,F0⋅sgn(ω)+bω,ω=0,∣F外∣<Fsω=0
低速爬行效应的本质是静摩擦与动摩擦的突变导致的非线性现象。通过摩擦补偿、提高阻尼、自适应控制等方法可以有效降低或消除低速爬行效应。
根据你的问题,速度跟踪问题中,设定输入为匀速 ( r(t) = vt )(( v ) 为常数),我们需要分析摩擦补偿开关线的位置。这涉及到摩擦力的非线性补偿,尤其是库仑摩擦的“开关”特性。
1. 系统简化与误差信号
- 设定 ( r(t) = vt ),则期望速度 ( r’(t) = v )。
- 令实际输出为 ( \theta(t) ),实际速度为 ( \omega = \dot{\theta}(t) )。
- 速度误差 ( e = v - \omega )。
2. 摩擦补偿的开关线分析
摩擦力表达式回顾
[
F_f = F_0 \cdot \text{sgn}(\omega) + b\omega
]
摩擦补偿常采用如下形式:
[
F(\omega) = kF_0 \cdot \text{sgn}(\omega)
]
其中 ( k > 1 ) 是补偿系数。
系统受控方程
忽略惯性和扰动,系统在稳态时有:
[
K_d e = F_f - F(\omega)
]
[
K_d (v - \omega) = F_0 \cdot \text{sgn}(\omega) + b\omega - kF_0 \cdot \text{sgn}(\omega)
]
[
K_d (v - \omega) = (1-k)F_0 \cdot \text{sgn}(\omega) + b\omega
]
开关线的定义
开关线是指摩擦补偿项 ( F(\omega) ) 发生切换的速度点,通常是 (\omega = 0) 处,但由于补偿系数 ( k > 1 ),实际切换点会偏移。
求解开关线位置
令 ( \omega \to 0^+ ) 和 ( \omega \to 0^- ) 分别分析:
- 当 ( \omega \to 0^+ )(正向刚起动):
[
K_d (v - 0) = (1-k)F_0 + 0
\implies v = \frac{(1-k)F_0}{K_d}
] - 当 ( \omega \to 0^- )(反向刚起动):
[
K_d (v - 0) = (k-1)F_0 + 0
\implies v = \frac{(k-1)F_0}{K_d}
]
因此,开关线在速度平面上的位置为:
[
v = \pm \frac{(k-1)F_0}{K_d}
]
- 正向:( v = \frac{(k-1)F_0}{K_d} )
- 反向:( v = -\frac{(k-1)F_0}{K_d} )
3. 参数范围下的开关线区间
根据参数范围:
- ( F_0 \in [1, 3] )
- ( k \in [1.1, 1.5] )
- ( K_d \in [2, 10] )
开关线的最大/最小值:
- 最大值(( F_0=3, k=1.5, K_d=2 )):
[
v_{max} = \frac{(1.5-1)\times 3}{2} = \frac{0.5 \times 3}{2} = 0.75
] - 最小值(( F_0=1, k=1.1, K_d=10 )):
[
v_{min} = \frac{(1.1-1)\times 1}{10} = \frac{0.1}{10} = 0.01
]
所以,开关线的位置区间为:
[
v \in \left[0.01,, 0.75\right]
]
(正负对称,反向为负值)
4. 结论
- 开关线是摩擦补偿切换的速度点,表达式为 ( v = \pm \frac{(k-1)F_0}{K_d} )。
- 参数范围下,开关线区间为 ( v \in [-0.75, -0.01] \cup [0.01, 0.75] )。
- 物理意义:当期望速度 ( v ) 小于该区间时,系统可能出现低速爬行或停滞;大于该区间时,摩擦补偿能有效克服摩擦,实现平滑跟踪。
根据你给出的随动电机位置控制系统框图,结合摩擦补偿环节,误差动力学方程可按如下步骤推导:
1. 定义变量
- 设参考输入 ( r(t) = vt ),期望速度 ( v ) 为常数。
- 实际输出角度 ( \theta(t) ),实际速度 ( \omega = \dot{\theta}(t) )。
- 误差 ( e = r(t) - \theta(t) )。
- 摩擦力 ( F_f = F_0 \cdot \text{sgn}(\omega) + b\omega )。
- 摩擦补偿 ( F(\omega) = kF_0 \cdot \text{sgn}(\omega) )。
2. 系统主通道传递函数
电机环节为一阶惯性环节:
[
\frac{K_d}{T_{em}s + 1}
]
积分环节:
[
\frac{1}{s}
]
3. 系统方程
系统输入为 ( e ),输出为 ( \omega ):
[
\omega(s) = \frac{K_d}{T_{em}s + 1} \left[ e(s) - f(s) \right]
]
其中 ( f(t) = F_f - F(\omega) ) 为摩擦补偿后剩余摩擦力。
4. 误差动力学方程(时域)
[
T_{em} \dot{\omega} + \omega = K_d \left[ e - f(t) \right]
]
又 ( \omega = \dot{\theta} ),( e = r(t) - \theta(t) ),( r(t) = vt )。
[
T_{em} \ddot{\theta} + \dot{\theta} = K_d \left[ v t - \theta(t) - f(t) \right]
]
5. 误差动力学方程(以误差为变量)
令 ( e = r(t) - \theta(t) ),则 ( \dot{e} = v - \dot{\theta} ),( \ddot{e} = -\ddot{\theta} )。
将 ( \dot{\theta} = v - \dot{e} ),( \ddot{\theta} = -\ddot{e} ) 代入上式:
[
T_{em}(-\ddot{e}) + (v - \dot{e}) = K_d \left[ e - f(t) \right]
]
[
- T_{em} \ddot{e} + v - \dot{e} = K_d e - K_d f(t)
]
[ - T_{em} \ddot{e} - \dot{e} - K_d e = -v - K_d f(t)
]
[
T_{em} \ddot{e} + \dot{e} + K_d e = v + K_d f(t)
]
6. 最终误差动力学方程
[
\boxed{
T_{em} \ddot{e} + \dot{e} + K_d e = v + K_d \left[ F_0 \cdot \text{sgn}(\omega) + b\omega - kF_0 \cdot \text{sgn}(\omega) \right]
}
]
或
[
T_{em} \ddot{e} + \dot{e} + K_d e = v + K_d \left[ (1-k)F_0 \cdot \text{sgn}(\omega) + b\omega \right]
]
其中 (\omega = v - \dot{e})。
我们来详细分析误差动力学方程的奇点类型,并计算自然频率和阻尼比。
1. 误差动力学方程回顾
上一问推导的误差动力学方程为:
[
T_{em} \ddot{e} + \dot{e} + K_d e = v + K_d \left[ (1-k)F_0 \cdot \text{sgn}(\omega) + b\omega \right]
]
其中 (\omega = v - \dot{e})。
对于奇点类型分析,我们只需关注齐次方程(即忽略右侧的常数和非线性项):
[
T_{em} \ddot{e} + \dot{e} + K_d e = 0
]
2. 标准二阶系统形式
将其与标准二阶系统比较:
[
\ddot{e} + 2\xi\omega_n \dot{e} + \omega_n^2 e = 0
]
对比可得:
- ( T_{em} \ddot{e} + \dot{e} + K_d e = 0 )
- 两边同时除以 ( T_{em} ):
[
\ddot{e} + \frac{1}{T_{em}} \dot{e} + \frac{K_d}{T_{em}} e = 0
]
所以:
- ( 2\xi\omega_n = \frac{1}{T_{em}} )
- ( \omega_n^2 = \frac{K_d}{T_{em}} )
3. 自然频率与阻尼比公式
[
\omega_n = \sqrt{\frac{K_d}{T_{em}}}
]
[
\xi = \frac{1}{2} \cdot \frac{1}{T_{em} \omega_n} = \frac{1}{2} \cdot \frac{1}{T_{em} \sqrt{K_d/T_{em}}} = \frac{1}{2} \cdot \frac{1}{\sqrt{K_d T_{em}}}
]
4. 奇点类型分析
特征方程为:
[
s^2 + \frac{1}{T_{em}} s + \frac{K_d}{T_{em}} = 0
]
其根为:
[
s_{1,2} = -\frac{1}{2T_{em}} \pm \sqrt{\left(\frac{1}{2T_{em}}\right)^2 - \frac{K_d}{T_{em}}}
]
- 若 ( \xi > 1 ):实根,过阻尼,稳定结点
- 若 ( \xi = 1 ):实根相等,临界阻尼,稳定结点
- 若 ( 0 < \xi < 1 ):复根,阻尼振荡,稳定焦点
5. 参数范围下的数值区间
- ( T_{em} \in [0.5, 10] )
- ( K_d \in [2, 10] )
自然频率区间:
[
\omega_n = \sqrt{\frac{K_d}{T_{em}}}
]
- 最小:( \sqrt{2/10} \approx 0.447 )
- 最大:( \sqrt{10/0.5} = \sqrt{20} \approx 4.472 )
阻尼比区间:
[
\xi = \frac{1}{2\sqrt{K_d T_{em}}}
]
- 最小:( \frac{1}{2\sqrt{10 \times 10}} = \frac{1}{2 \times 10} = 0.05 )
- 最大:( \frac{1}{2\sqrt{2 \times 0.5}} = \frac{1}{2 \times 1} = 0.5 )
6. 结论
- 自然频率:(\omega_n \in [0.447, 4.472])
- 阻尼比:(\xi \in [0.05, 0.5])
- 奇点类型:由于阻尼比 ( \xi < 1 ),系统为欠阻尼二阶系统,奇点为稳定焦点(复共轭极点)。
你的问题涉及摩擦补偿系统的相轨迹分析,需要结合“开关线”的物理意义、奇点类型(稳定焦点/结点)以及参数选择对系统相轨迹的影响。下面分点详细分析:
1. 开关线的物理意义
- 开关线是摩擦补偿项切换的速度点,表达式为:
[
v = \pm \frac{(k-1)F_0}{K_d}
] - 在相平面((e, \dot{e}) 或 (\omega, \theta))上,开关线将状态空间分为不同区域,系统状态点跨越开关线时,摩擦补偿项发生突变,导致系统动力学发生切换。
2. 奇点类型
- 由前述分析,系统为欠阻尼二阶系统,奇点为稳定焦点(复共轭极点)。
- 若参数选择使阻尼比增大(趋近于1),奇点可能变为稳定结点(实根),但在本参数范围内主要为焦点。
3. 参数选择对相轨迹的影响
(1)不同参数下的自然频率与阻尼比
- 自然频率高((K_d)大,(T_{em})小):系统响应快,轨迹收敛速度快,螺旋收敛半径小。
- 阻尼比低((K_d)大,(T_{em})大):轨迹振荡明显,螺旋收敛,可能出现多次穿越开关线。
- 阻尼比高((K_d)小,(T_{em})小):轨迹收敛快,振荡小,趋于直线收敛。
(2)开关线与相轨迹的关系
- 初始状态远离开关线:系统状态点向奇点螺旋收敛,可能多次穿越开关线,每次穿越摩擦补偿项突变,导致轨迹折线或“拐弯”。
- 初始状态靠近开关线:状态点可能在开关线附近来回切换,若摩擦补偿过度((k)过大),可能出现“抖振”或“爬行”现象。
- 参数选择合理((k)适中,阻尼适中):轨迹平滑收敛,穿越开关线后迅速进入稳定区。
(3)极端参数情况
- 摩擦补偿不足((k \approx 1)):补偿效果差,低速区易出现爬行,轨迹在开关线附近停滞或缓慢收敛。
- 摩擦补偿过度((k)过大):补偿项反向过大,系统可能在开关线两侧来回切换,出现高频抖振(chattering)。
- 阻尼极低:轨迹大幅螺旋,穿越开关线次数多,易激发系统振荡。
- 阻尼极高:轨迹趋于直线,快速收敛到奇点,穿越开关线次数少。
4. 相轨迹可能的典型情况总结
| 参数选择 | 奇点类型 | 相轨迹表现 | 物理现象 |
|---|---|---|---|
| 欠阻尼(常见) | 稳定焦点 | 螺旋收敛,穿越开关线多次 | 振荡、爬行 |
| 临界/过阻尼 | 稳定结点 | 直线收敛,穿越开关线少 | 平滑收敛 |
| (k)过小 | 稳定焦点 | 轨迹在开关线附近停滞 | 低速爬行 |
| (k)过大 | 稳定焦点 | 轨迹在开关线两侧高频切换 | 抖振(chattering) |
| 合理参数 | 稳定焦点 | 平滑螺旋收敛,快速进入稳定区 | 最优跟踪 |
5. 物理解释
- 开关线决定了摩擦补偿的切换点,是系统非线性的来源。
- 奇点类型决定了系统收敛的方式(螺旋/直线)。
- 参数选择影响系统的响应速度、振荡程度和摩擦补偿效果。
- 合理设计参数,可使系统状态点平滑穿越开关线,快速收敛到目标点,避免爬行和抖振。
结合电机内部参数与外部摩擦,降低或消除低速爬行(stick-slip/creep)效应的方法主要有以下几类:
1. 优化电机内部参数
(1)提高系统刚度与响应速度
- 减小机电时间常数 (T_{em}):选用响应更快的电机和驱动器,使系统对输入变化更敏感,减少因摩擦导致的滞后和爬行。
- 增大传动系数 (K_d):提高控制器增益,使系统对误差的修正更有力,能更快克服摩擦力。
(2)增加系统阻尼
- 适当增加黏性摩擦系数 (b) 或在控制器中引入虚拟阻尼,有助于抑制因摩擦突变引起的振荡和爬行。
2. 外部摩擦建模与补偿
(1)摩擦力前馈补偿
- 在控制器中加入摩擦力模型(如 (F_0 \cdot \text{sgn}(\omega) + b\omega)),实时补偿摩擦力,尤其是库仑摩擦和黏性摩擦。
- 通过调节补偿系数 (k),使补偿力略大于实际摩擦力,帮助系统顺利启动,减少低速爬行。
(2)自适应摩擦补偿
- 利用自适应算法在线估算摩擦参数,动态调整补偿量,适应摩擦力随工况变化的特性。
(3)鲁棒控制
- 设计鲁棒控制器(如滑模控制、H∞控制等),增强系统对摩擦不确定性的抑制能力,保证低速下的跟踪性能。
3. 信号处理与微振动法
(1)叠加高频微振动(Dither)
- 在控制信号中叠加小幅高频信号,使摩擦力平均化,降低静摩擦影响,促使系统平滑启动,减少爬行。
(2)信号滤波与死区处理
- 对速度或位置反馈信号进行滤波,消除由摩擦引起的高频噪声和微小振荡。
- 在控制器中设置死区,避免对微小误差的过度响应,减少爬行。
4. 机械结构优化
- 选用低摩擦材料或润滑剂,优化机械结构,减小静摩擦与动摩擦的差异。
- 保持传动系统清洁,防止异物或磨损导致摩擦力突变。
5. 参数选择建议
- (T_{em}) 选小,(K_d) 选大,提升系统刚度和响应速度。
- (k) 选在1.1~1.3,既能克服静摩擦,又避免过度补偿导致抖振。
- (b) 适当增大,提升阻尼,抑制振荡。
- (F_0) 精确建模,保证补偿效果。
总结表
| 方法类别 | 具体措施 | 作用机制 |
|---|---|---|
| 内部参数优化 | 提高刚度、响应速度,增大阻尼 | 快速克服摩擦,抑制爬行 |
| 摩擦补偿 | 前馈补偿、自适应补偿、鲁棒控制 | 主动抵消摩擦影响 |
| 信号处理 | 微振动法、滤波、死区 | 平滑信号,减少爬行 |
| 机械结构优化 | 降低摩擦材料、润滑、清洁 | 减小摩擦力突变 |
结论:
通过优化电机内部参数(如减小(T_{em})、增大(K_d)、适当增大(b)),结合精确的摩擦建模与补偿(如摩擦力前馈、自适应补偿、微振动法等),可以有效降低或消除低速爬行效应,实现伺服系统的平滑低速运动。