FreeRTOS静态任务的创建、删除和软件定时器的开启(尚硅谷学习笔记)
按照之前的动态任务进行相应的文件处理(此处就不在介绍)
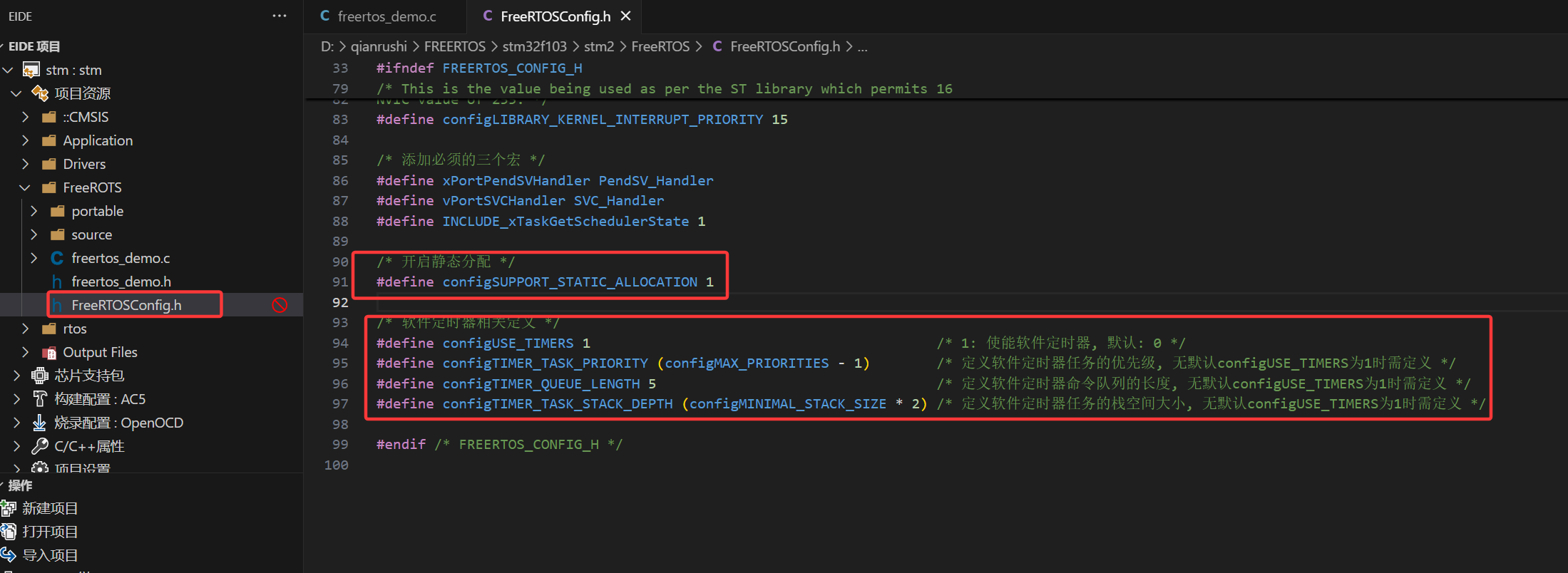
/* 开启静态分配 */
#define configSUPPORT_STATIC_ALLOCATION 1/* 软件定时器相关定义 */
#define configUSE_TIMERS 1 /* 1: 使能软件定时器, 默认: 0 */
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES - 1) /* 定义软件定时器任务的优先级, 无默认configUSE_TIMERS为1时需定义 */
#define configTIMER_QUEUE_LENGTH 5 /* 定义软件定时器命令队列的长度, 无默认configUSE_TIMERS为1时需定义 */
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE * 2) /* 定义软件定时器任务的栈空间大小, 无默认configUSE_TIMERS为1时需定义 */在FreeRTOSConfig.h中添加开启静态分配和软件定时器相关的定义
相应需要配置的两个函数配置
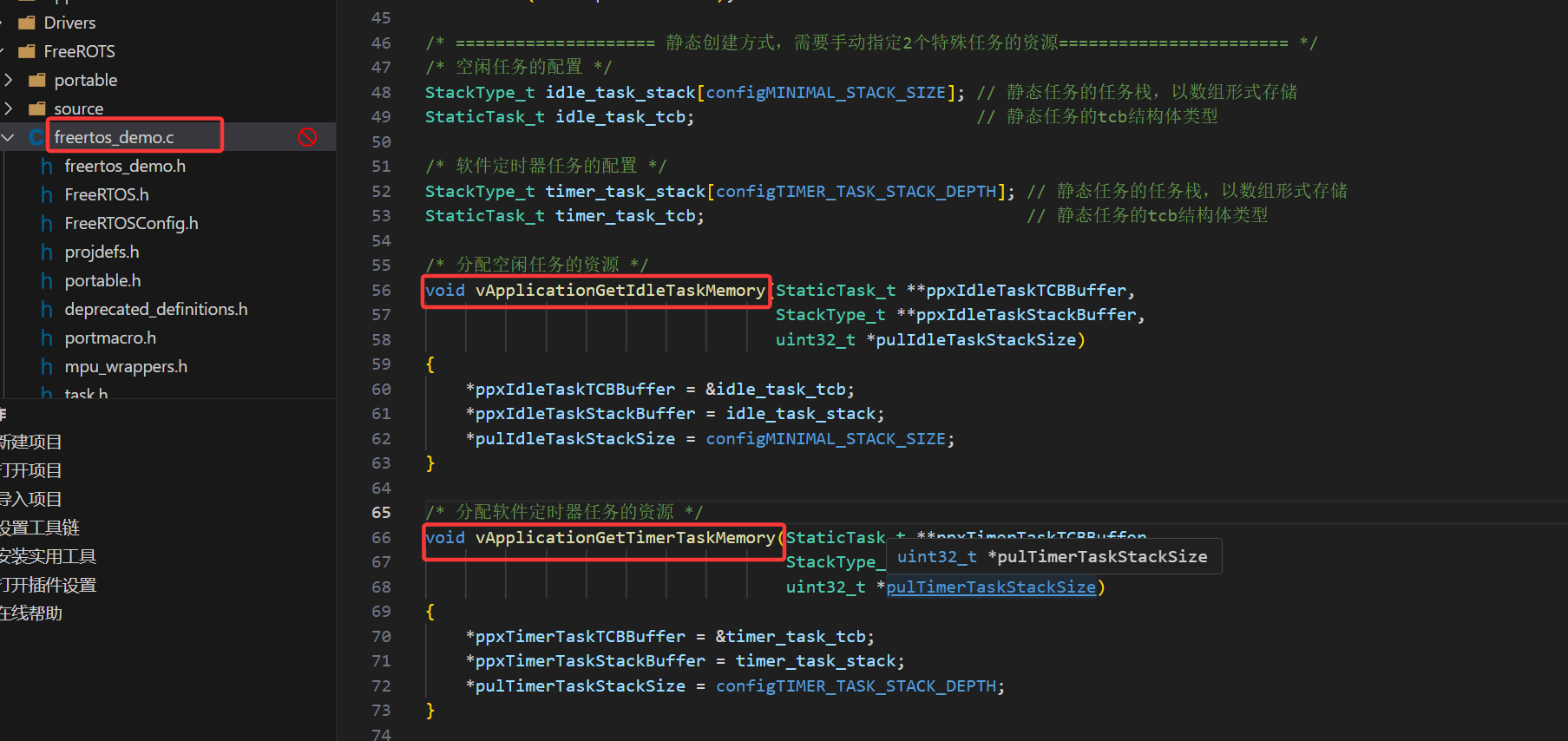
/* ==================== 静态创建方式,需要手动指定2个特殊任务的资源======================= */
/* 空闲任务的配置 */
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE]; // 静态任务的任务栈,以数组形式存储
StaticTask_t idle_task_tcb; // 静态任务的tcb结构体类型/* 软件定时器任务的配置 */
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH]; // 静态任务的任务栈,以数组形式存储
StaticTask_t timer_task_tcb; // 静态任务的tcb结构体类型/* 分配空闲任务的资源 */
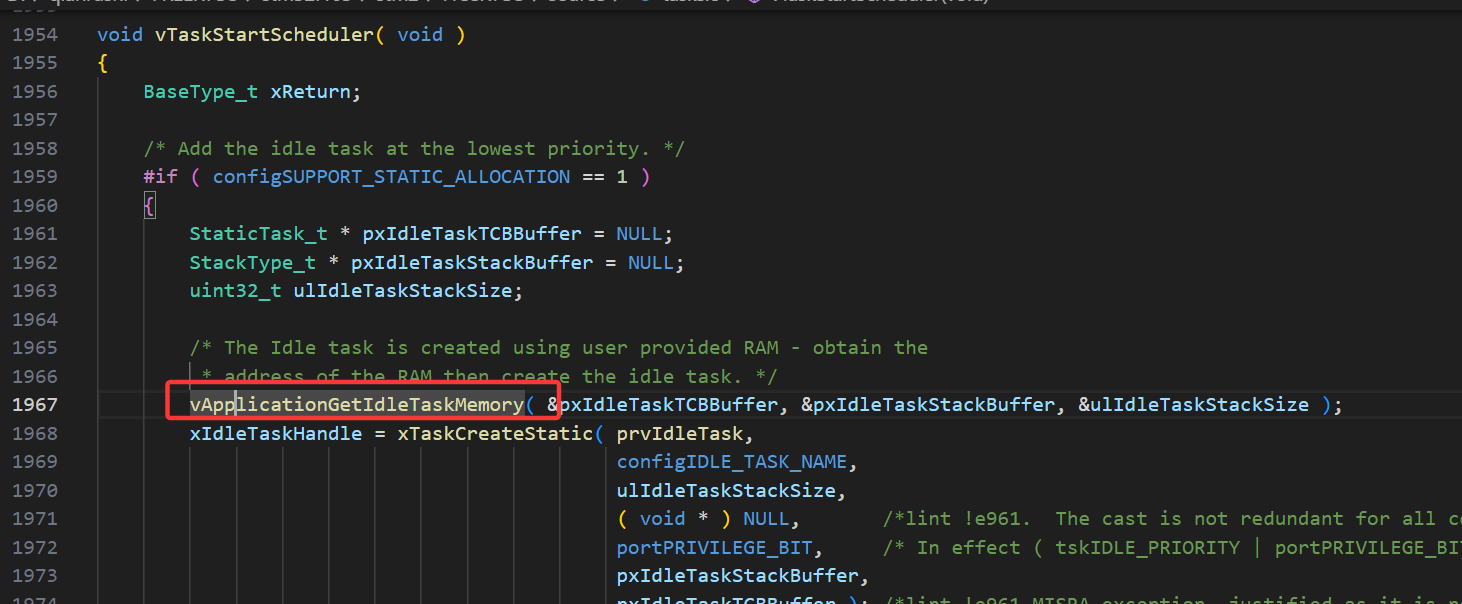
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,StackType_t **ppxIdleTaskStackBuffer,uint32_t *pulIdleTaskStackSize)
{*ppxIdleTaskTCBBuffer = &idle_task_tcb;*ppxIdleTaskStackBuffer = idle_task_stack;*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}/* 分配软件定时器任务的资源 */
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,StackType_t **ppxTimerTaskStackBuffer,uint32_t *pulTimerTaskStackSize)
{*ppxTimerTaskTCBBuffer = &timer_task_tcb;*ppxTimerTaskStackBuffer = timer_task_stack;*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}freertos_demo.c文件
/** @Author: random* @Date: 2025-05-10 01:23:40* @Last Modified by: random* @Last Modified time: Do not Edit*/
#include "freertos_demo.h"
/* freertos相关的头文件,必须的 */
#include "FreeRTOS.h"
#include "task.h"
/* 需要用到的其他头文件 */
#include "fun.h"/* 启动任务的配置 */
#define START_TASK_STACK 128
#define START_TASK_PRIORITY 1
TaskHandle_t start_task_handle;
StackType_t start_task_stack[START_TASK_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t start_task_tcb; // 静态任务的tcb结构体类型
void start_task(void *pvParameters);/* 任务1的配置 */
#define TASK1_STACK 128
#define TASK1_PRIORITY 2
TaskHandle_t task1_handle;
StackType_t task1_stack[TASK1_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t task1_tcb; // 静态任务的tcb结构体类型
void task1(void *pvParameters);/* 任务2的配置 */
#define TASK2_STACK 128
#define TASK2_PRIORITY 3
TaskHandle_t task2_handle;
StackType_t task2_stack[TASK2_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t task2_tcb; // 静态任务的tcb结构体类型
void task2(void *pvParameters);/* 任务3的配置 */
#define TASK3_STACK 128
#define TASK3_PRIORITY 4
TaskHandle_t task3_handle;
StackType_t task3_stack[TASK3_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t task3_tcb; // 静态任务的tcb结构体类型
void task3(void *pvParameters);/* ==================== 静态创建方式,需要手动指定2个特殊任务的资源======================= */
/* 空闲任务的配置 */
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE]; // 静态任务的任务栈,以数组形式存储
StaticTask_t idle_task_tcb; // 静态任务的tcb结构体类型/* 软件定时器任务的配置 */
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH]; // 静态任务的任务栈,以数组形式存储
StaticTask_t timer_task_tcb; // 静态任务的tcb结构体类型/* 分配空闲任务的资源 */
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,StackType_t **ppxIdleTaskStackBuffer,uint32_t *pulIdleTaskStackSize)
{*ppxIdleTaskTCBBuffer = &idle_task_tcb;*ppxIdleTaskStackBuffer = idle_task_stack;*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}/* 分配软件定时器任务的资源 */
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,StackType_t **ppxTimerTaskStackBuffer,uint32_t *pulTimerTaskStackSize)
{*ppxTimerTaskTCBBuffer = &timer_task_tcb;*ppxTimerTaskStackBuffer = timer_task_stack;*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}/*** @description: 启动FreeRTOS* @return {*}*/
void freertos_start(void)
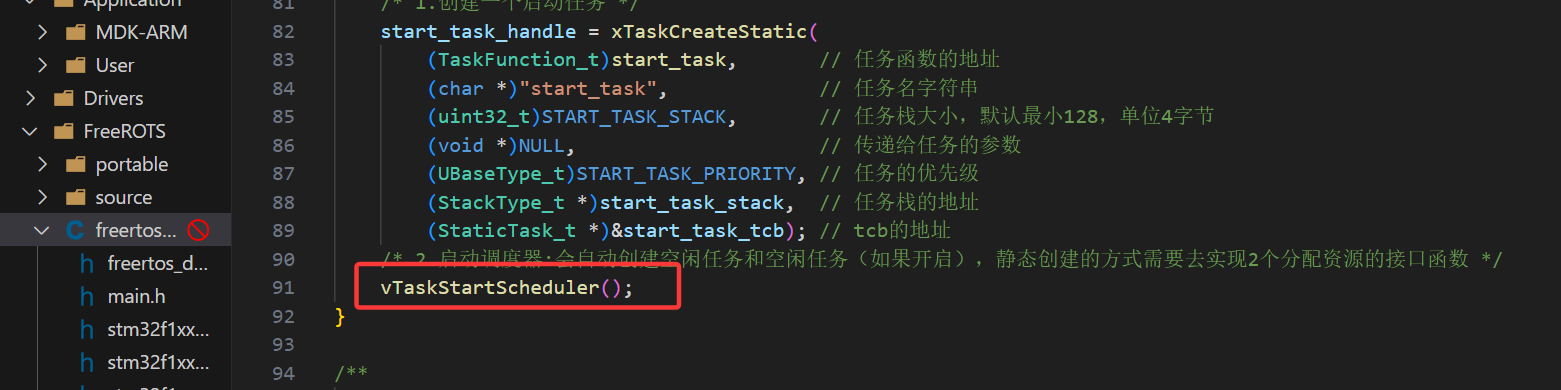
{/* 1.创建一个启动任务 */start_task_handle = xTaskCreateStatic((TaskFunction_t)start_task, // 任务函数的地址(char *)"start_task", // 任务名字符串(uint32_t)START_TASK_STACK, // 任务栈大小,默认最小128,单位4字节(void *)NULL, // 传递给任务的参数(UBaseType_t)START_TASK_PRIORITY, // 任务的优先级(StackType_t *)start_task_stack, // 任务栈的地址(StaticTask_t *)&start_task_tcb); // tcb的地址/* 2.启动调度器:会自动创建空闲任务和空闲任务(如果开启),静态创建的方式需要去实现2个分配资源的接口函数 */vTaskStartScheduler();
}/*** @description: 启动任务:用来创建其他Task* @param {void} *pvParameters* @return {*}*/
void start_task(void *pvParameters)
{/* 进入临界区:保护临界区里的代码不会被打断 */taskENTER_CRITICAL();/* 使用静态创建3个任务 */task1_handle = xTaskCreateStatic((TaskFunction_t)task1,(char *)"task1",(configSTACK_DEPTH_TYPE)TASK1_STACK,(void *)NULL,(UBaseType_t)TASK1_PRIORITY,(StackType_t *)task1_stack, // 任务栈的地址(StaticTask_t *)&task1_tcb); // tcb的地址task2_handle = xTaskCreateStatic((TaskFunction_t)task2,(char *)"task2",(configSTACK_DEPTH_TYPE)TASK2_STACK,(void *)NULL,(UBaseType_t)TASK2_PRIORITY,(StackType_t *)task2_stack, // 任务栈的地址(StaticTask_t *)&task2_tcb); // tcb的地址task3_handle = xTaskCreateStatic((TaskFunction_t)task3,(char *)"task3",(configSTACK_DEPTH_TYPE)TASK3_STACK,(void *)NULL,(UBaseType_t)TASK3_PRIORITY,(StackType_t *)task3_stack, // 任务栈的地址(StaticTask_t *)&task3_tcb); // tcb的地址/* 启动任务只需要执行一次即可,用完就删除自己 */vTaskDelete(NULL);/* 退出临界区 */taskEXIT_CRITICAL();
}/*** @description: 任务一:实现LED1每500ms闪烁一次* @param {void} *pvParameters* @return {*}*/
void task1(void *pvParameters)
{while (1){printf("task1 is running\r\n");led_n(1, 1);vTaskDelay(500);led_n(1, 0);vTaskDelay(500);}
}/*** @description: 任务二:实现LED2每500ms闪烁一次* @param {void} *pvParameters* @return {*}*/
void task2(void *pvParameters)
{while (1){printf("task2 is running\r\n");led_n(8, 1);vTaskDelay(500);led_n(8, 0);vTaskDelay(500);}
}/*** @description: 任务三:判断按键KEY1是否按下,按下则删掉task1* @param {void} *pvParameters* @return {*}*/
extern volatile uint8_t j;
extern volatile uint8_t key_number;
void task3(void *pvParameters)
{while (1){printf("task3 is running\r\n");if (key_number == 1){/* 判断是否已经删过,避免重复执行删除 */if (task1_handle != NULL){/* key1按下了,删除task1 */printf("task1 is delete\r\n");vTaskDelete(task1_handle);task1_handle = NULL;}key_number = 0;}vTaskDelay(500);// HAL_Delay(500); //这种delay不会让任务进入阻塞态,不会让出cpu使用权}
}