机器视觉的磁芯定位贴合应用
在现代工业生产里,定位贴膜工艺对精度和效率要求极高,机器视觉技术为其带来革命性突破。该技术借助高分辨率相机,像“电子眼”般快速捕捉贴膜与被贴物体图像,机器视觉系统再深度分析,精准获取位置、形状、尺寸等参数,迅速算出最佳贴膜路径与位置。其优势突出,精度上实现毫米级控制,大幅降低次品率,提升产品质量;效率上达成高速自动化作业,突破人工速度限制,提高生产效率,还节省了人力成本。
目前,此技术已在多行业广泛应用。电子行业中,用于手机屏幕和元器件贴附;汽车行业里,满足内饰件精密贴膜需求;包装行业上,保障标签贴合与包装材料精准定位,有力推动各行业向智能化、自动化发展,成为现代工业生产的关键技术。
在磁芯贴合的工艺流程中,贴合的精准度直接关乎产品的质量与性能。下面将深入剖析针对磁芯贴合的视觉解决方案与工作流程。
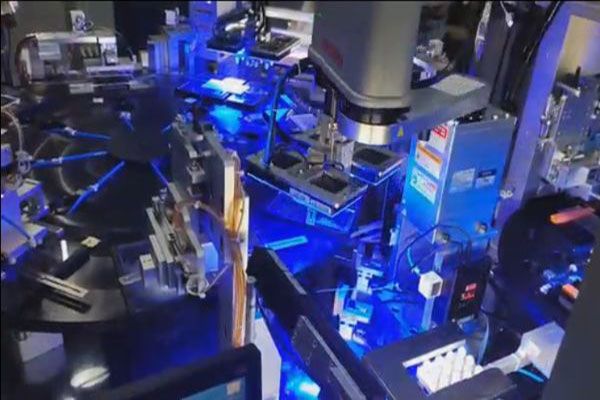
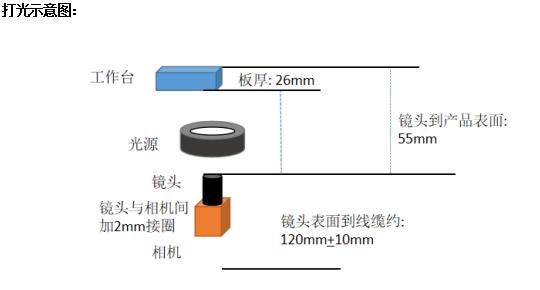
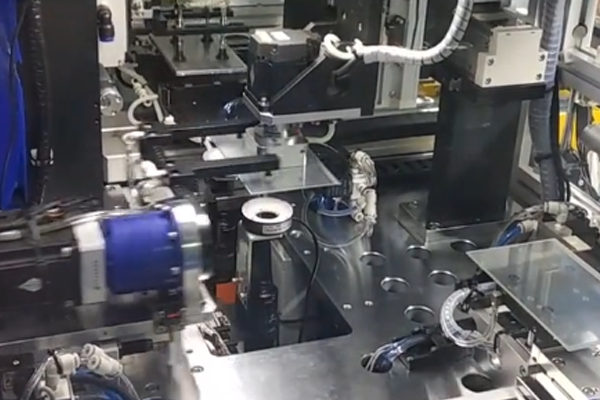
相机光源采用从下往上照射的方式,下相机与光源被稳固地安装在设计好的位置上,并进行精确的校准和调试,确保其能够以最佳的状态进行图像采集。
图像采集是整个流程的起始点,犹如建造高楼大厦时打下坚实的地基。MasterAlign视觉系统选用专业的相机作为图像采集设备,它具备高分辨率和精准的成像能力,能够清晰捕捉磁芯及其周边环境的细节。相机如同一位敏锐的观察者,以特定的视角和参数,将现实场景转化为数字图像,为后续的分析处理提供丰富的原始数据。
采集到图像后,进入图像特征提取阶段。这一过程就像是在浩瀚的信息海洋中筛选出有价值的珍宝。通过MasterAlign视觉系统先进的图像处理算法,我们能够从复杂的图像中提取出具有代表性和区分度的特征,例如磁芯的边缘轮廓、特定标记点的位置等。这些特征如同磁芯的“数字指纹”,能够唯一地标识其状态和位置,为后续的坐标比对提供关键依据。

将提取到的图像特征与预先设定好的磁芯贴合固定坐标进行比对,是检测过程中的核心环节。预先设定的固定坐标是基于产品设计要求和工艺标准确定的理想位置,而图像特征则反映了实际生产中磁芯的实际位置。通过精确的坐标比对,我们能够清晰地发现两者之间的差异,就像用一把精准的尺子衡量实际与理想的差距。
在完成坐标比对后,MasterAlign视觉系统进行偏差计算。如同一位数学大师,运用复杂的算法和模型,对坐标差异进行精确计算,得出磁芯实际位置与理想位置之间的偏差数值。这些偏差数值包括在X、Y、Z等多个方向上的位移偏差以及旋转偏差等,能够全面、准确地反映磁芯的贴合误差情况。
依据计算得出的偏差数据,系统实时引导机械手完成精准贴合动作,这是整个检测流程的最终目标。机械手如同一位技艺精湛的工匠,根据偏差数据精确调整自身的运动轨迹和姿态,将磁芯准确地贴合到指定位置。通过这种闭环控制系统,实现了从检测到调整的实时反馈和精准控制,确保磁芯贴合的高精度和一致性。
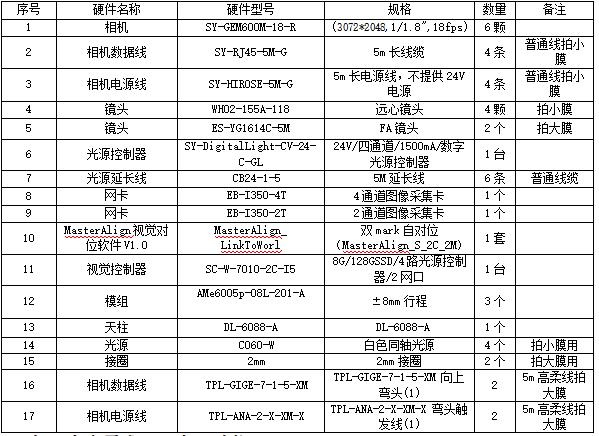
配置清单如下:
MasterAlign视觉系统通过高精度视觉定位与闭环控制技术,实现了磁芯贴合的毫米级误差控制。通过专业视觉算法与PLC控制器的深度集成,可适应电子制造、精密装配等领域24小时连续生产的严苛需求,为产品尺寸一致性、位置精度等关键质量指标提供稳定保障。该技术的应用有效解决了传统人工贴合效率低、精度波动大的痛点,成为智能制造领域提升产线自动化水平的重要技术支撑。