机器人教学和实践的可编程智能仿生机器人平台——智能六足机器人
智能六足机器人是用于机器人教学和实践的可编程智能仿生机器人平台。本机器人沙盘能兼容全球著名开源项目Arduino、树莓派和开源机器人操作系统 ROS,可以灵活扩展各种电子模块,可在智能六足机器人平台进行二次开发,拓展机器人功能。院校师生可以通过机器人开发各种技能,如SLAM 定位导航、物体的识别与抓取、语音识别与操控、野外探测救援等,更进一步还可以结合各种人工智能的算法,让机器人能胜任更加复杂多变的任务。
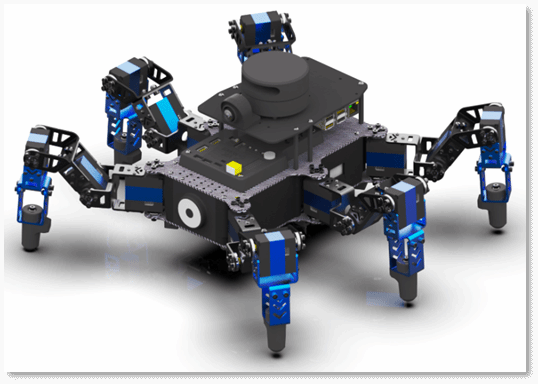
图1 智能六足机器人
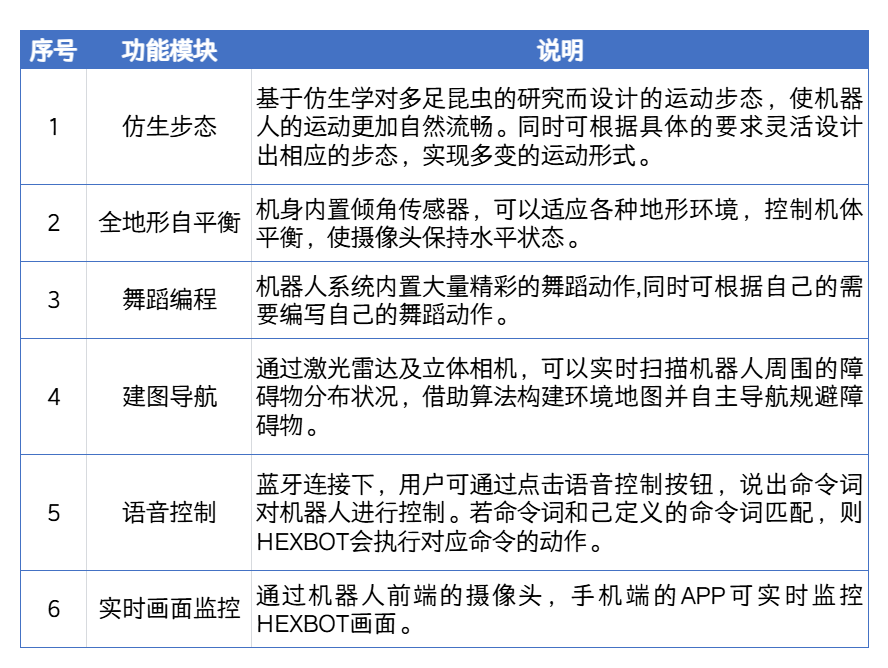
2.功能简介
3.产品特色
1.机器人系统搭载视觉循迹模块,可通过视觉识别黑色的轨道,跟寻椭圆形的轨道自动行走。
2.机器人可适应多种地形环境,通过调整步态和步幅,可实现上下楼梯、爬坡等指令动作。
3.机器人具有可视化仿真模拟功能,可以通过3D可视化软件对机器人动作进行编辑,实现机器人“舞蹈”。
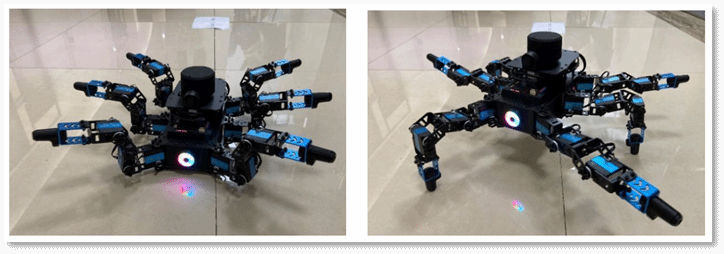
图4 智能六足机器人“舞蹈”实物图
4.通过立体相机的三维点云数据,借助SLAM相关主流算法可以实现3D建图并自主导航规避障碍物。
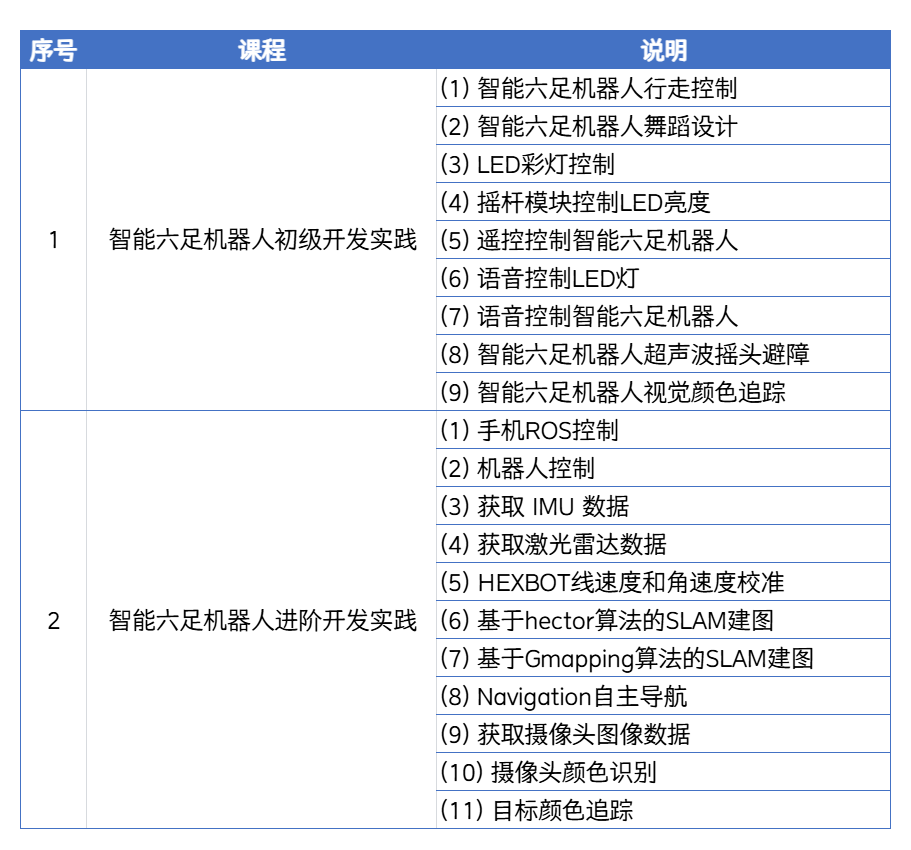
4.实训支持
如您希望进一步了解服务内容,欢迎联系我们的客户服务团队,专业顾问将为您提供个性化服务演示与试用方案定制服务。