第十节:图像处理基础-图像算术运算 (加法、减法、混合)
引言
在计算机视觉领域,图像算术运算是最基础却至关重要的核心技术。无论是实现简单的图片合成、开发智能监控系统,还是构建复杂的医学影像分析工具,加减运算和混合操作都扮演着关键角色。OpenCV作为最流行的计算机视觉库,提供了完善的图像处理函数集。本文将深入解析三种核心算术运算(加法、减法、混合),通过代码实例演示其工作原理,并揭示它们在实际项目中的典型应用场景。
一、图像加法:超越像素的简单叠加
1.1 原生加法与饱和加法
在OpenCV中,加法操作有两种实现方式,它们的核心区别在于对像素值溢出的处理策略:
import cv2
import numpy as np# 创建测试图像(200x200的红色和蓝色画布)
red_canvas = np.zeros((200,200,3), dtype=np.uint8)
red_canvas[:,:] = [0,0,255]blue_canvas = np.zeros((200,200,3), dtype=np.uint8)
blue_canvas[:,:] = [255,0,0]# 原生加法(模运算)
naive_add = red_canvas + blue_canvas# OpenCV饱和加法
cv_add = cv2.add(red_canvas, blue_canvas)# 并排显示结果
cv2.imshow("Naive Addition", naive_add)
cv2.imshow("OpenCV Addition", cv_add)
cv2.waitKey(0)关键差异解析:
-
原生加法(numpy):当像素值超过255时执行模运算(
(300) % 256 = 44),导致颜色失真 -
饱和加法(cv2.add):严格限制结果在0-255范围内,保持色彩合理性
1.2 动态范围扩展技术
专业图像处理中常使用16位或浮点格式存储中间结果,避免信息丢失:
# 转换到16位空间处理
img1_16 = cv2.imread('img1.jpg', cv2.IMREAD_UNCHANGED).astype('uint16')
img2_16 = cv2.imread('img2.jpg', cv2.IMREAD_UNCHANGED).astype('uint16')
result_16 = cv2.add(img1_16, img2_16)# 归一化回8位
result_8bit = cv2.normalize(result_16, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)二、图像减法:差异检测的艺术
2.1 基础减法操作
减法在运动检测、背景消除等领域应用广泛:
foreground = cv2.imread('current_frame.jpg')
background = cv2.imread('empty_scene.jpg')# 安全减法
diff = cv2.subtract(background, foreground)# 绝对值减法(应对光照变化)
abs_diff = cv2.absdiff(background, foreground)2.2 工业级背景消除方案
结合阈值处理和形态学操作提升效果:
gray_diff = cv2.cvtColor(abs_diff, cv2.COLOR_BGR2GRAY)
_, thresh = cv2.threshold(gray_diff, 30, 255, cv2.THRESH_BINARY)# 消除噪声
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5))
cleaned = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel)# 查找运动物体轮廓
contours, _ = cv2.findContours(cleaned, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)三、图像混合:视觉叙事的魔法
3.1 线性混合原理
cv2.addWeighted()函数实现精准的透明度控制:
alpha = 0.7 # 第一张图的权重
beta = 0.3 # 第二张图的权重
gamma = 10 # 亮度调节量blended = cv2.addWeighted(img1, alpha, img2, beta, gamma)参数解析矩阵:
| 参数 | 作用域 | 典型值范围 | 效果说明 |
|---|---|---|---|
| alpha | 0.0-1.0 | 0.5 | 控制第一张图的可见度 |
| beta | 0.0-1.0 | 0.5 | 控制第二张图的可见度 |
| gamma | 整数 | 0-100 | 整体亮度偏移量 |
3.2 高级混合技巧
动态混合效果实现:
for i in np.linspace(0, 1, 30):current_blend = cv2.addWeighted(img1, i, img2, 1-i, 0)cv2.imshow('Transition', current_blend)cv2.waitKey(50)蒙版混合技术:
# 创建圆形蒙版
mask = np.zeros_like(img1)
cv2.circle(mask, (300,200), 150, (255,255,255), -1)# 应用蒙版混合
blended = cv2.bitwise_and(img1, mask) + cv2.bitwise_and(img2, 255-mask)四、实战:智能安防监控系统开发
4.1 系统架构设计
graph TD
A[视频输入] --> B[背景建模]
B --> C[实时差分计算]
C --> D[运动物体检测]
D --> E[警报触发]
E --> F[日志记录]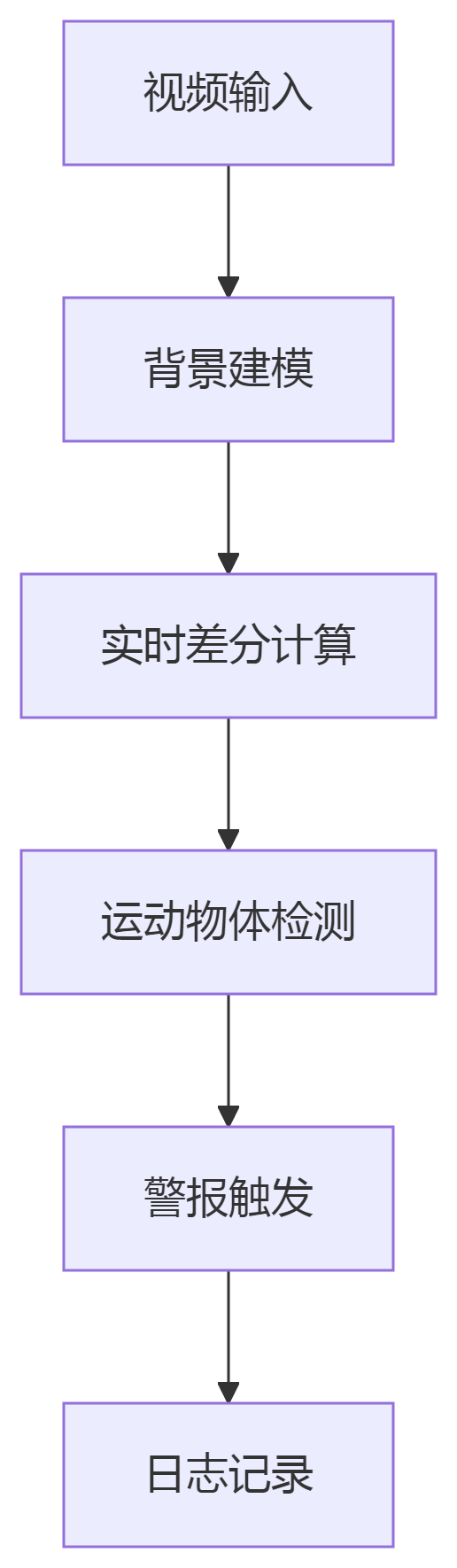
4.2 核心代码实现
class MotionDetector:def __init__(self, accum_weight=0.5):self.avg = Noneself.accum_weight = accum_weightdef process_frame(self, frame):gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)gray = cv2.GaussianBlur(gray, (7,7), 0)if self.avg is None:self.avg = gray.copy().astype("float")returncv2.accumulateWeighted(gray, self.avg, self.accum_weight)frame_delta = cv2.absdiff(gray, cv2.convertScaleAbs(self.avg))thresh = cv2.threshold(frame_delta, 5, 255, cv2.THRESH_BINARY)[1]thresh = cv2.dilate(thresh, None, iterations=2)contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)for c in contours:if cv2.contourArea(c) < 5000:continue(x,y,w,h) = cv2.boundingRect(c)cv2.rectangle(frame, (x,y), (x+w,y+h), (0,255,0), 2)return frame五、工程实践中的注意事项
-
数据兼容性检查
assert img1.shape == img2.shape, "图像尺寸不一致" assert img1.dtype == img2.dtype, "数据类型不匹配" -
色彩空间转换
# 统一转换到HSV空间处理 hsv1 = cv2.cvtColor(img1, cv2.COLOR_BGR2HSV) hsv2 = cv2.cvtColor(img2, cv2.COLOR_BGR2HSV) -
内存优化技巧
# 使用UMat加速运算 img1_umat = cv2.UMat(img1) img2_umat = cv2.UMat(img2) result_umat = cv2.addWeighted(img1_umat, 0.5, img2_umat, 0.5, 0) result = cv2.UMat.get(result_umat)六、性能优化与算法扩展
6.1 SIMD指令加速
通过OpenCV的IPPICV优化库自动启用Intel处理器指令集,提升运算速度:
# 查看优化状态 print(cv2.useOptimized()) # 应返回True cv2.setUseOptimized(True)
6.2 GPU加速实现
对于4K等高分辨率视频流处理:
gpu_img1 = cv2.cuda_GpuMat()
gpu_img1.upload(img1)gpu_img2 = cv2.cuda_GpuMat()
gpu_img2.upload(img2)gpu_result = cv2.cuda.addWeighted(gpu_img1, 0.5, gpu_img2, 0.5, 0)
result = gpu_result.download()七、总结与进阶方向
本文详细解析了OpenCV中的核心算术运算,但在实际工程应用中,这些基础操作往往需要与其他技术结合:
-
结合深度学习:使用神经网络生成alpha通道实现智能抠图
-
多光谱融合:红外与可见光图像的加权融合增强
-
HDR成像:多曝光图像的融合技术
-
实时视频处理:结合光流法的动态混合效果