STM32的定时器
定时器的介绍
介绍:STM32F103C8T6微控制器内部集成了多种类型的定时器,这些定时器在嵌入式系统中扮演着重要角色,用于计时、延时、事件触发以及PWM波形生成、脉冲捕获等应用。
*几种定时器(STM32F103系列):
| 高级定时器(1) | 通用定时器(3) | 看门口(2) | 滴答定时器(1) |
| TIM1:
| TIM2、TIM3和TIM4:
| 2 个看门狗定时器 ( 独立的和窗口型的 ) | 系统时间定时器: 24 位自减型计数器 |
定时器的工作原理
定时器的核心:计数器
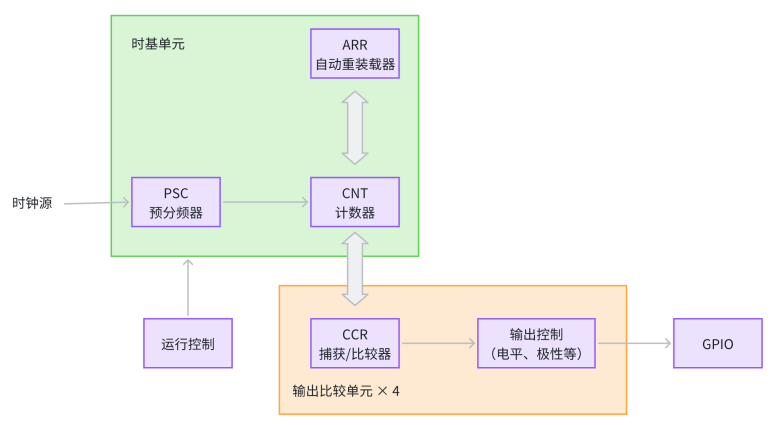
每个定时器都由一个16位计数器、预分频器和自动重装寄存器的时基单元组成。预分频器可以对时钟进行分频,计数器则对预分频后的时钟进行计数。当计数器的值达到设定值时,会触发中断,从而执行相应的定时任务。
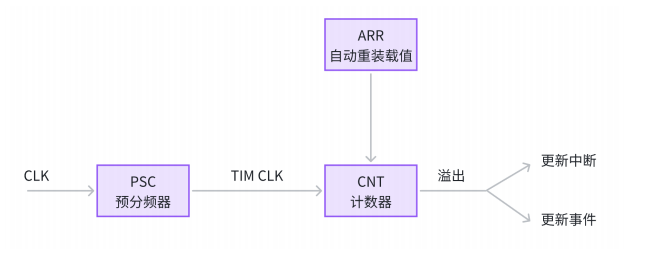
注意事项:设置预分频器系数(PSC)和自动重装值(ARR)
- 代码PSC写 0,实际:分频系数是1(不分频);PSC写1,分频系数是2(2分频);
- 代码ARR写65536-1,实际是2^16 = 65536。
三种定时器的介绍
| 类型 | 编号 | 总线 | 功能 |
| 高级定时器(本章先不介绍) | TIM1、TIM8 | APB2 | 拥有通用定时器全部功能,并额外具有重复计数器、死区生 成、互补输出、刹车输入(三项无刷电机的特供:foc)等功能;-------三种计数模式。 |
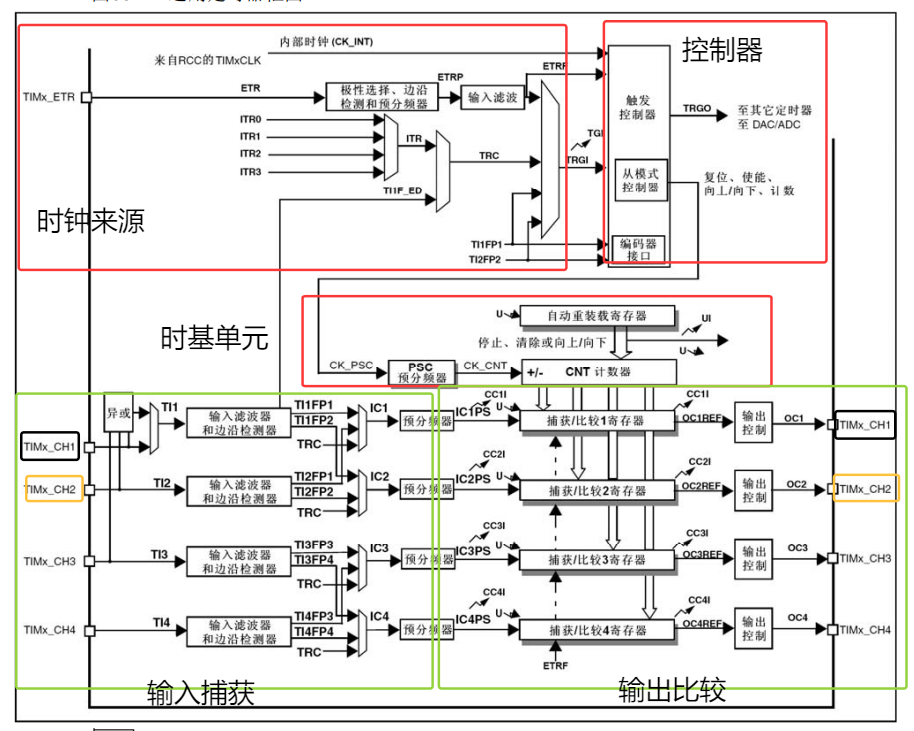
| 通用定时器 | TIM2、TIM3、TIM4、TIM5 | APB1 | 拥有基本定时器全部功能,并额外具有 内外时钟源选择 、 输入捕获、输出比较 、 PWM 或 脉冲计数的通道 、 编码器接口、主从触发模式等功能;------三种计数模式。 |
| 基本定时器(这个芯没有) | TIM6、TIM7 | APB1 | (时基)拥有定时中断、主模式触发 DAC(绕过CPU) 的功能。------只支持向上计数。 |
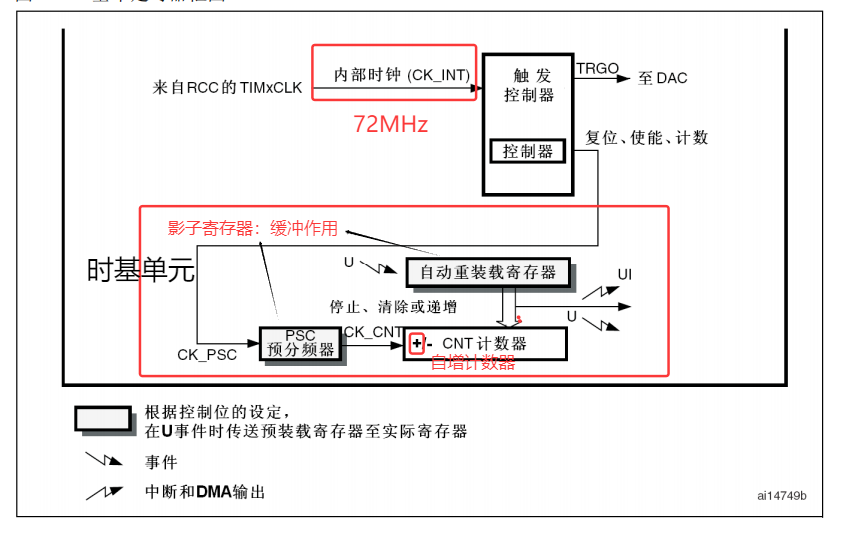
- 定时器都是72MHz
定时器的框图
(参考手册中)
- 基本定时器
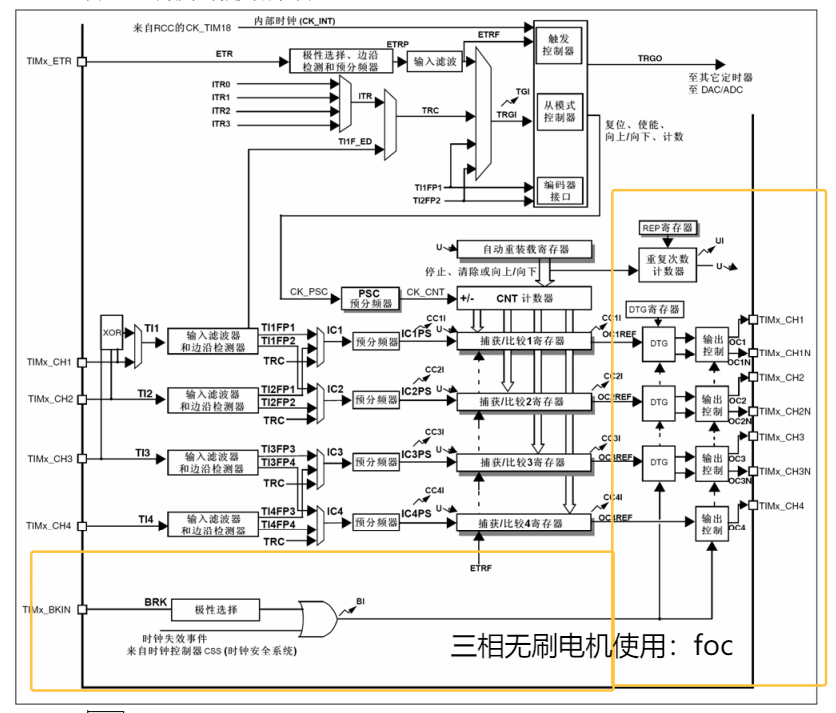
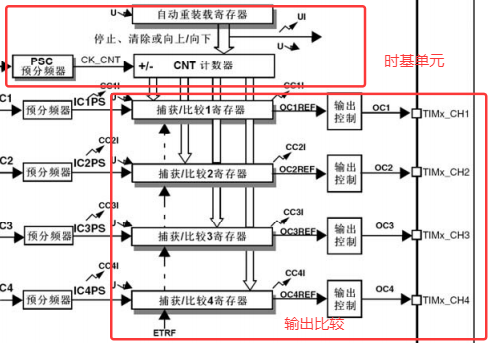
- 通用定时器
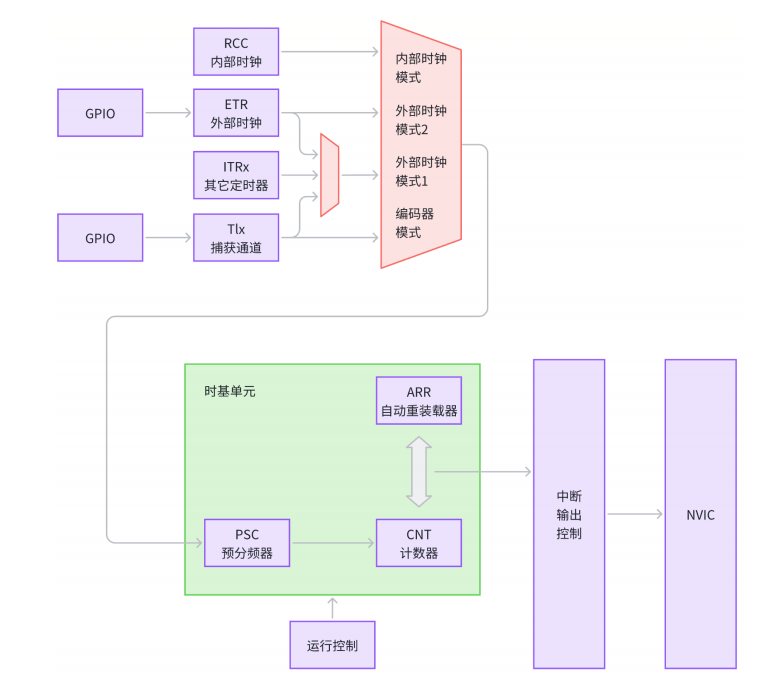
- 简图:
- 高级定时器:
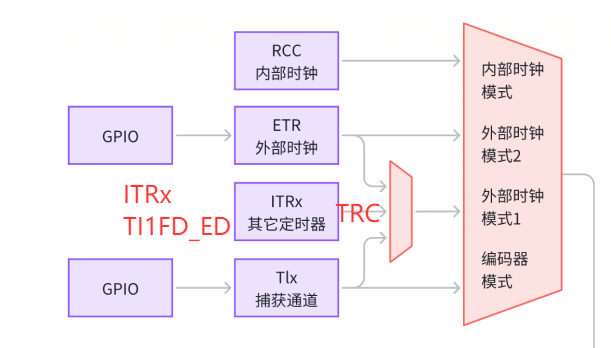
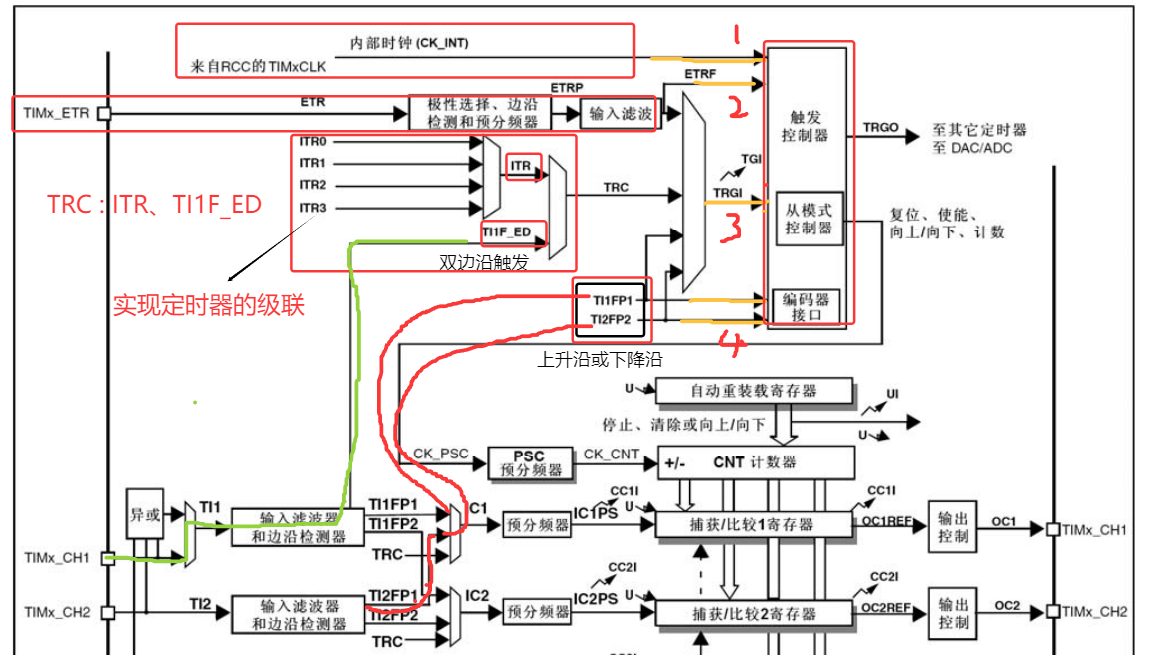
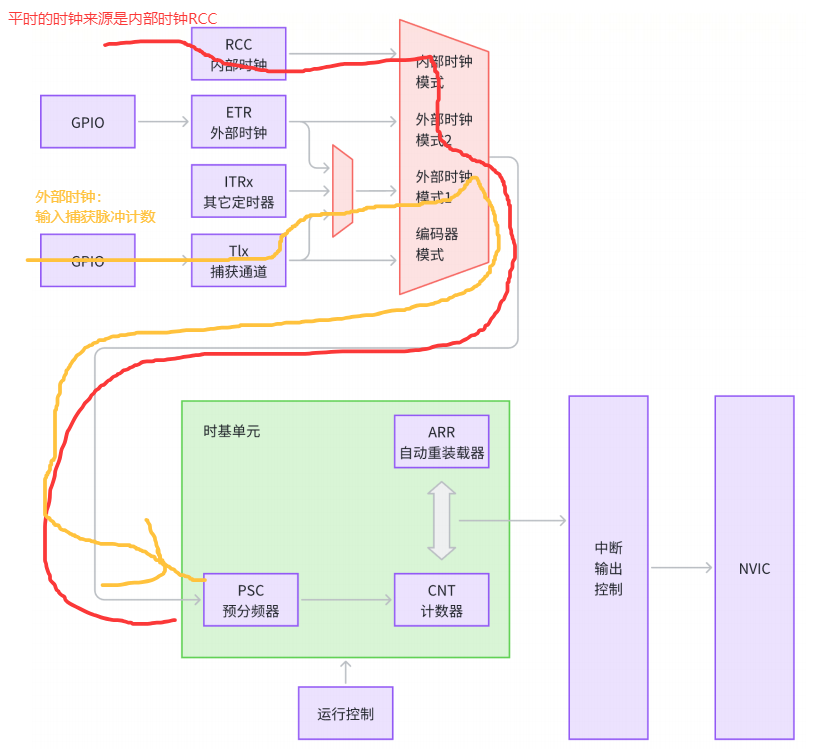
- 通用定时器时钟的来源
简图:
框图:
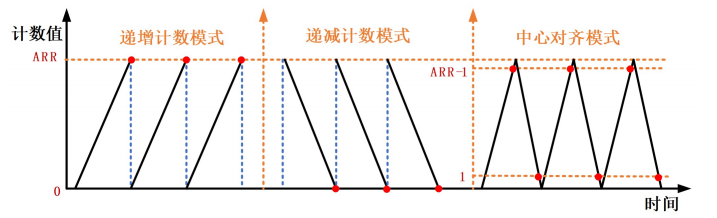
定时器的计数模式
| 计数模式 | 计数器溢出值 | 计数器重装值 |
| 向上计数 | CNT = ARR | CNT = 0 |
| 向下计数 | CNT = 0 | CNT = ARR |
| 中心对齐计数 | CNT = ARR - 1 CNT = 1 | CNT = ARR CNT = 0 |
定时器溢出时间
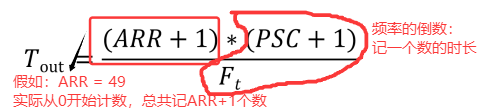
说明:
Tout:定时器溢出时间;Ft:定时器的时钟源频率;
ARR:自动重装载寄存器的值;PSC:预分频器寄存器的值。
举例:要定时500ms,PSC、ARR、Ft的值是多少?
答:PSC = 7199,ARR = 4999,Ft = 72M。
(当频率大时,记一个数的时间短,ARR的值会变大;当频率小时,记一个数的时间短,ARR的值小)。
定时器寄存器
时基单元寄存器
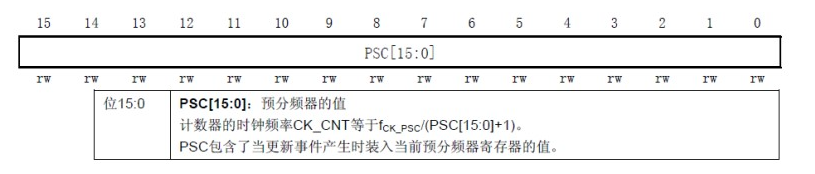
- 预分频寄存器( TIMx_PSC)-16位
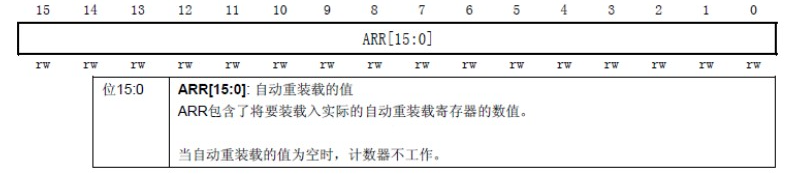
- 自动重装载寄存器( TIMx_ARR)-16位
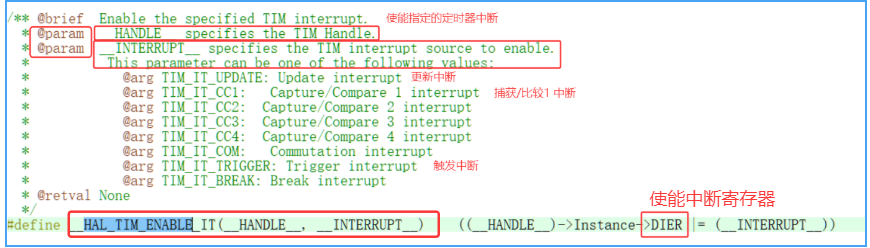
- DMA/中断使能寄存器 (TIMx_DIER)

第 0 位, 该位是更新中断允许位, 当定时器的更新中断,该位要设置为 1,来允许由于更新事件所产生的中断。
- 状态寄存器( TIMx_SR)

该寄存器用来标记当前与定时器相关的各种事件/中断是否发生。
输入捕获/输出比较寄存器
- 捕获/比较寄存器( TIMx_CCR1~4)

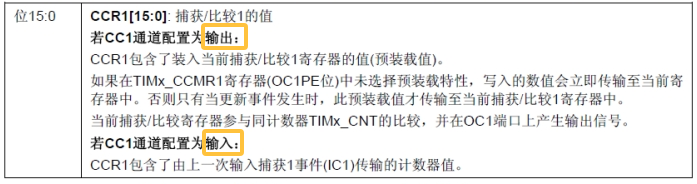
该寄存器用来存储捕获发生时, TIMx_CNT的值,我们从 TIMx_CCR1 就可以读出通道 1 捕获发生时刻的 TIMx_CNT 值,通过两次捕获(一次上升沿捕获,一次下降沿捕获)的差值,就可以计算出高电平脉冲的宽度。
捕获/比较模式寄存器( TIMx_CCMRx)
- TIMx_CCMR1(模式寄存器1):控制通道1和通道2

TIMx_CCMR1 是针对 2 个通道的配置,低八位[7:0]用于捕获 / 比较通道 1 的控制,而高八位[15:8]则用于捕获 / 比较通道 2 的控制。
- TIMx_CCMR2(模式寄存器2):控制通道3和通道4
四个通道的模式寄存器一样,重点介绍 TIMx_CMMR1 的[7:0]位:
输入捕获
![]()
输出比较
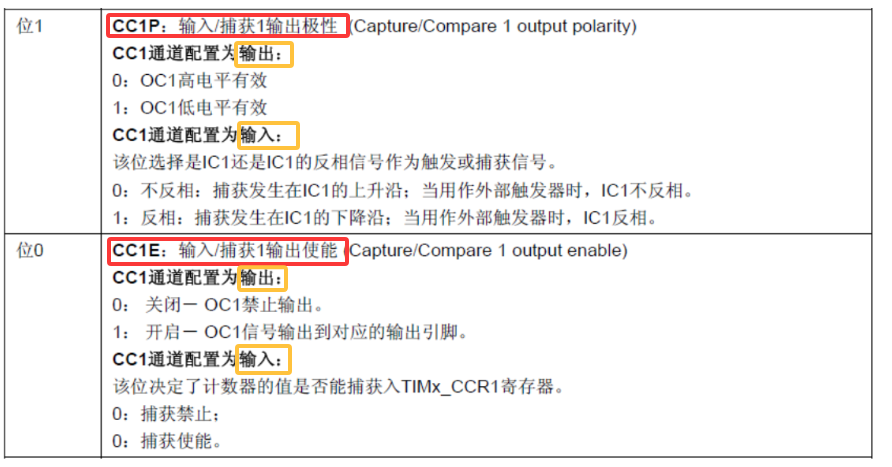
捕获/比较使能寄存器( TIMx_CCER)
- TIMx_CCER(捕获/比较使能寄存器)

定时器中断实验配置步骤
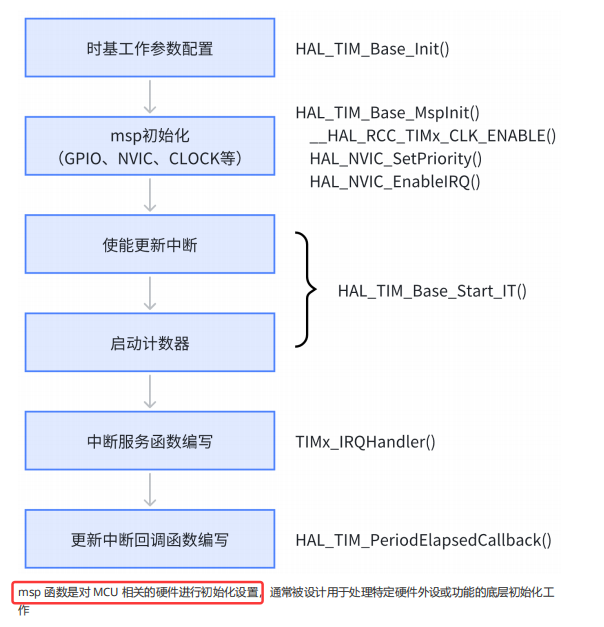
定时器中断的函数
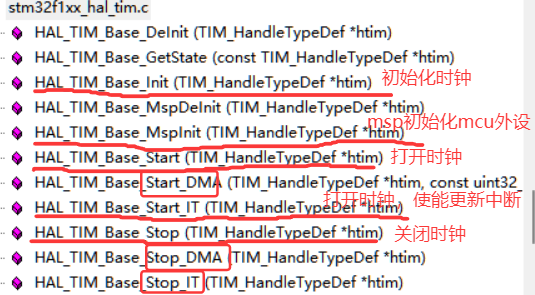
中断服务公共函数
![]()
更新中断的回调函数
![]()
其他中断回调函数
![]()
![]()
![]()
![]()
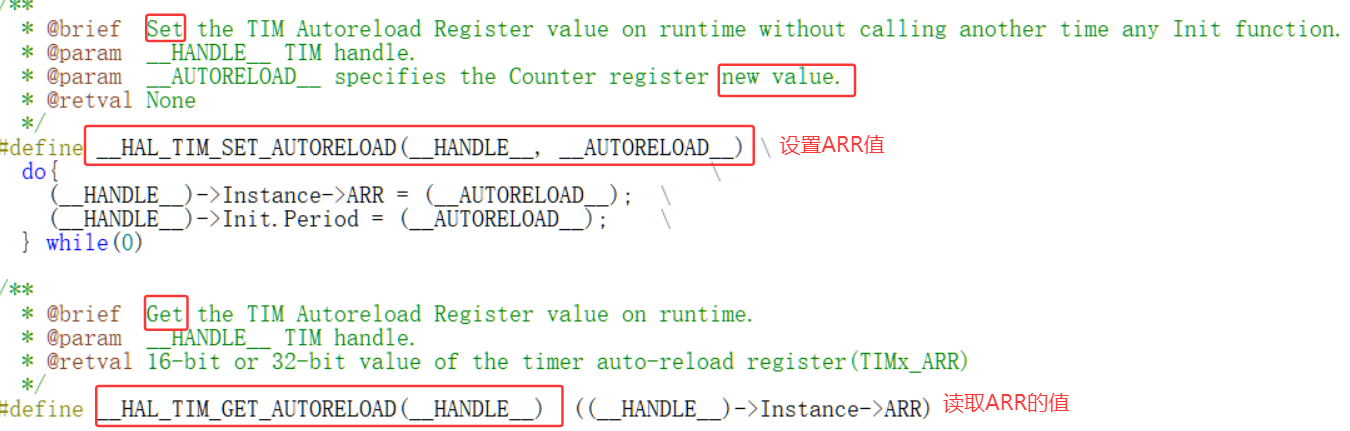
设置PSC值的函数:

设置/读取 ARR值的函数 :
小实验:定时器中断点灯
实验目的:使用定时器TIM2进行中断点灯,500msLED灯翻转一次。
硬件清单:上官二号、ST-Link。
- timer.c文件代码
#include "timer.h"
#include "led.h"TIM_HandleTypeDef time_hander = {0}; //定义一个全局结构体变量,结构体成员附一个默认值0。//时基单元初始化函数和中断公共回调函数中使用。
//定时器的时基单元初始化函数
void timer_base_init(uint16_t psc ,uint16_t arr){time_hander.Instance = TIM2;time_hander.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; //设置的是影子寄存器,是否自动重装载。time_hander.Init.CounterMode = TIM_COUNTERMODE_UP;time_hander.Init.Prescaler = psc;time_hander.Init.Period = arr;HAL_TIM_Base_Init(&time_hander);HAL_TIM_Base_Start_IT(&time_hander); //打开时钟和使能中断}
//msp函数:初始化MCU相关的硬件,例如:GPIO,NVIC,CLOCK
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim){ //这个函数在HAL_TIM_Base_Init()中调用if(htim->Instance == TIM2){ //先判断这个是不是TIM2定时器占用。__HAL_RCC_TIM2_CLK_ENABLE();HAL_NVIC_SetPriority(TIM2_IRQn,2,2);HAL_NVIC_EnableIRQ(TIM2_IRQn);}
}
//中断服务函数
void TIM2_IRQHandler(void){//中断公共处理的函数HAL_TIM_IRQHandler(&time_hander);
}
//更新中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ //据饼if(htim->Instance == TIM2){ //判断这个回调函数是否被其他定时器占用。led1_toggle();}
}
- time.h文件代码:
#ifndef __TIMER_H__
#define __TIMER_H__#include "stm32f1xx.h"void timer_base_init(uint16_t psc ,uint16_t arr);#endif- main.c文件代码
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "timer.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */timer_base_init(7200-1,5000-1); //500ms产生一次中断while(1){ }
}输出比较
简介
输出比较可以通过比较定时计数器的值 CNT 与设定的比较值 CCR,可以控制输出引脚的电平状态(置高或置低),从而实现生成一定频率和占空比的 PWM 波形。
简图:
框图(参考手册) :
PWM模式:
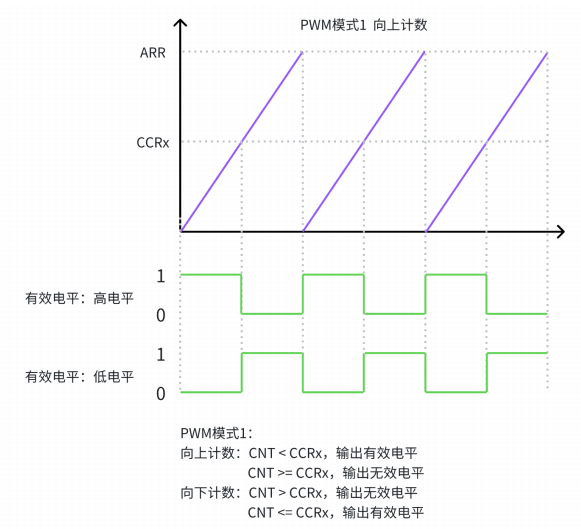
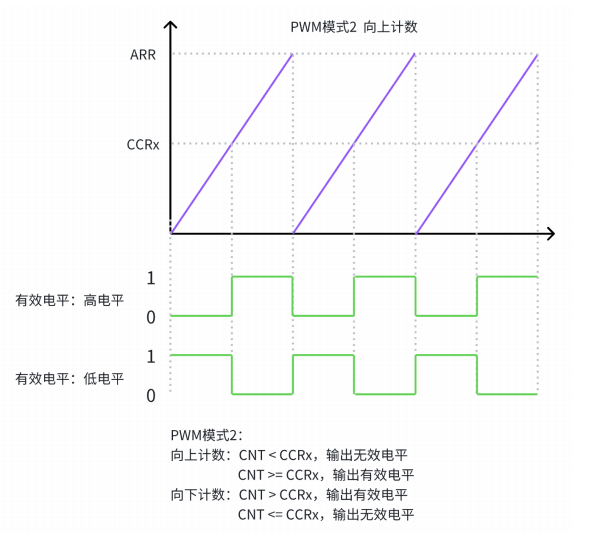
PWM介绍
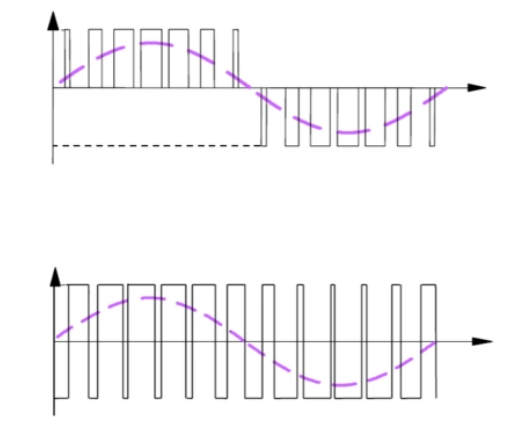
定义:PWM波形(Pulse Width Modulation,脉冲宽度调制波形)是一种占空比可变的脉冲波形。这种调制方式通过改变脉冲的宽度来控制电路中的信号强度和频率。具体来说,PWM波形中的高电平持续时间和低电平持续时间可以根据需要进行调整,从而实现对模拟信号电平的数字编码。
应用:PWM波形在各种领域都有广泛的应用,包括电源管理、电机控制、LED亮度调节等。此外,生成PWM波形的方法有多种,例如使用波形发生器、单片机或可编程逻辑器件等。
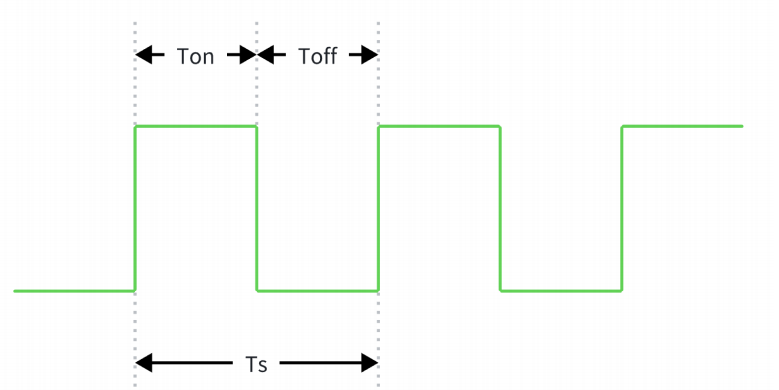
相关参数:
频率:1/Ts(定时器计数溢出的时间);
占空比:Ton / Ts(高电平占整个周期的比例,单位%);
分辨率:占空比变化步距。例:占空比50%,51%;分辨率:1%。分辨率越低对硬件的要求越高。
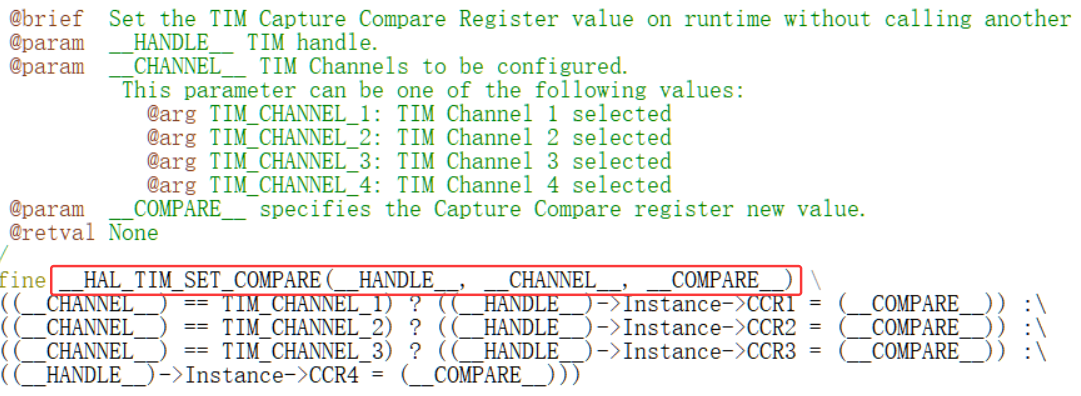
PWM相关的函数
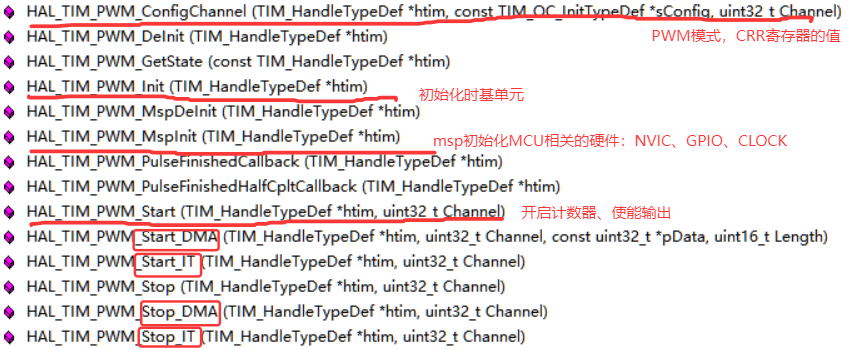
宏函数: 修改CRR寄存器的值
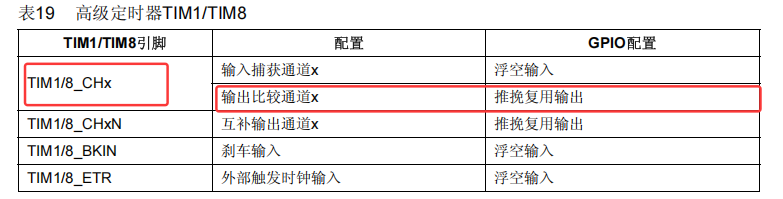
输出比较的引脚
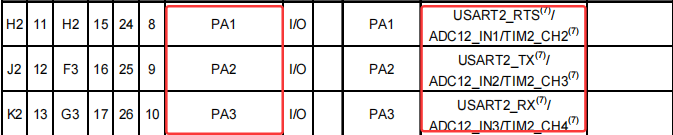
- TIM1_CHx(x:1、2、3、4)

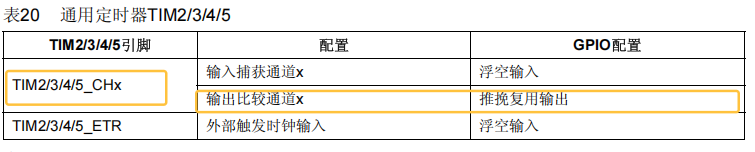
- TIM2_CHx(x:1、2、3、4)
- TIM3_CHx(x:1、2、3、4)

![]()
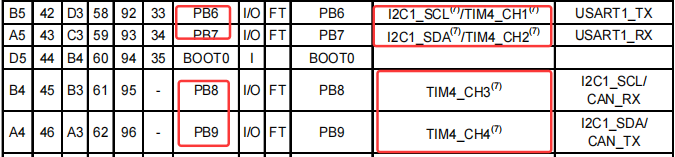
- TIM4_CHx(x:1、2、3、4)
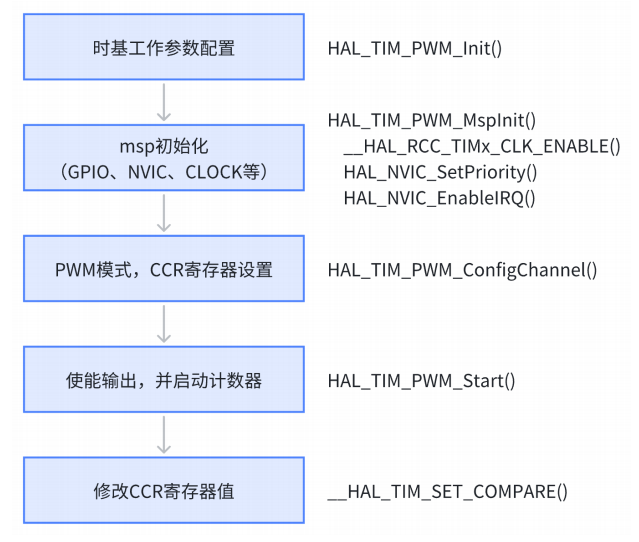
定时器输出PWM波配置步骤
根据上面简图配置:
小实验:呼吸灯实验
实验目的:使用 定时器4 通道3(看引脚定义表:PB8引脚)生成 PWM 波控制 LED1 ,实现呼吸灯效果。
- 频率:2kHz。根据定时器溢出时间计算:PSC=71,ARR=499。
硬件清单:开发板、ST-Link。
- pwm.c文件代码
#include "pwm.h"TIM_HandleTypeDef pwm_handle = {0};
void pwm_init(uint16_t psc,uint16_t arr){pwm_handle.Instance = TIM4;pwm_handle.Init.CounterMode = TIM_COUNTERMODE_UP;pwm_handle.Init.Period = arr;pwm_handle.Init.Prescaler = psc;pwm_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;HAL_TIM_PWM_Init(&pwm_handle);//pwm模式和crr寄存器设置TIM_OC_InitTypeDef tim_oc_initstruct = {0};tim_oc_initstruct.OCMode = TIM_OCMODE_PWM1; //pwm的模式tim_oc_initstruct.OCPolarity = TIM_OCPOLARITY_LOW; //高电平有效还是低电平;led灯是低电平点亮,故低电平有效tim_oc_initstruct.Pulse = arr/2; //占空比CCR的值,这里随便填,后面crr修改函数HAL_TIM_PWM_ConfigChannel(&pwm_handle,&tim_oc_initstruct,TIM_CHANNEL_3);//使能输出,启动计时器HAL_TIM_PWM_Start(&pwm_handle,TIM_CHANNEL_3);
}
//初始化msp函数
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim){if(htim ->Instance == TIM4){ //判断这个函数是否被定时器4占用__HAL_RCC_TIM4_CLK_ENABLE(); //打开定时器4的时钟__HAL_RCC_GPIOB_CLK_ENABLE(); //打开GPIO口的时钟GPIO_InitTypeDef gpio_initstruct;gpio_initstruct.Mode = GPIO_MODE_AF_PP; //复用推挽输出,看GPIO口定义表gpio_initstruct.Pin = GPIO_PIN_8;gpio_initstruct.Pull = GPIO_PULLUP;gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB,&gpio_initstruct);}
}
//修改crr的值的函数
void pwm_cmpare_set(uint16_t value){__HAL_TIM_SET_COMPARE(&pwm_handle,TIM_CHANNEL_3,value);
}
- pwm.h文件代码
#ifndef __PWM_H__
#define __PWM_H__
#include "stm32f1xx.h"void pwm_init(uint16_t psc,uint16_t arr);
void pwm_cmpare_set(uint16_t value);#endif
main.c文件代码
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "pwm.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */pwm_init(72-1,500-1);//在while函数中不停的修改CRR的值,来实现占空比不断改变while(1){ for(uint16_t i = 0;i<300;i++){pwm_cmpare_set(i);delay_ms(5);}for(uint16_t i = 0;i<300;i++){pwm_cmpare_set(300-i);delay_ms(5);}}
}写这个代码遇到的问题:
- 调用函数时要注意:DeInit函数和init函数。
- 根据引脚定义表,输出比较口对应哪一个GPIO口。
- 关于外设GPIO口的配置:(参考手册110)
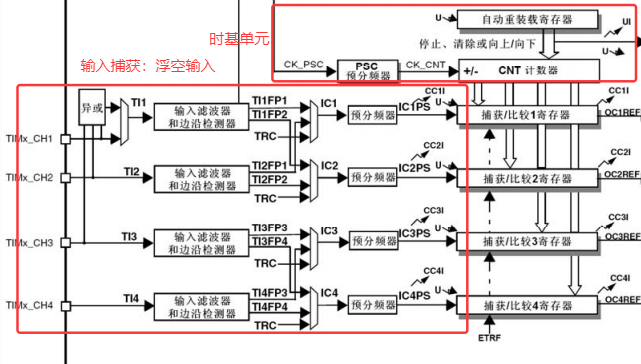
输入捕获
简介
输入捕获模式可以用来 测量脉冲宽度 或者 测量频率。STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能。 STM32 的输入捕获,简单的说就是通过检测 TIMx_CHx 上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的通道的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。同时还可以配置捕获时是否触发中断/DMA 等。
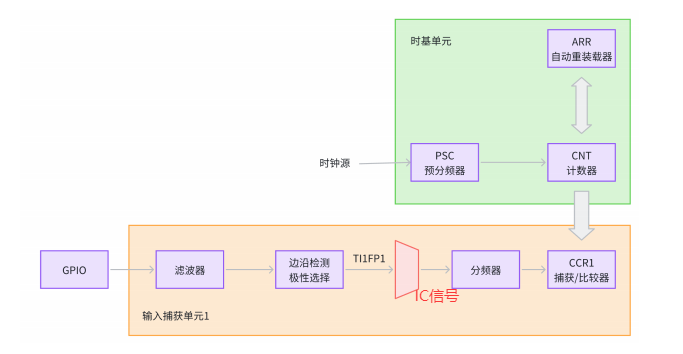
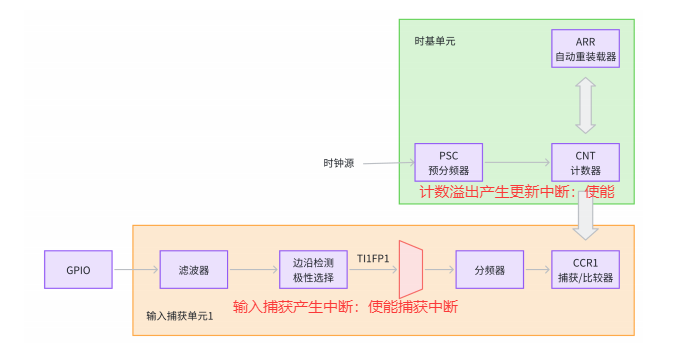
框图:(参考手册253)
输入捕获引脚
- 和上面输出比较的引脚相同,参考上面输出比较引脚
输入捕获相关函数
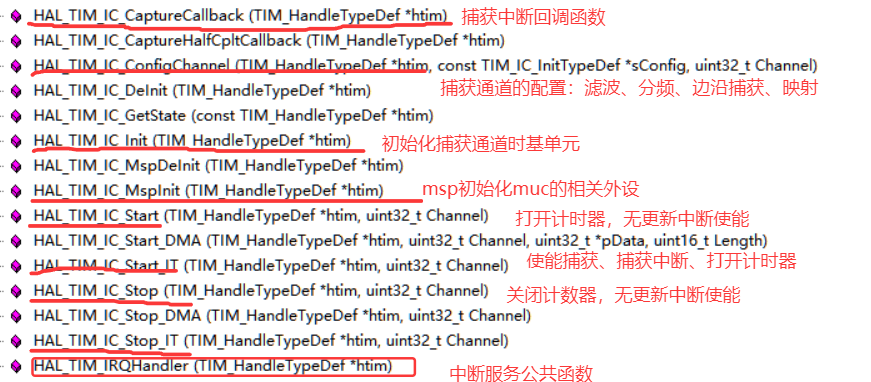
在输入捕获的时基单元里的定时器的使能更新中断的函数:
捕获回调函数:
![]()
读取输入捕获中CCR的值:
![]()
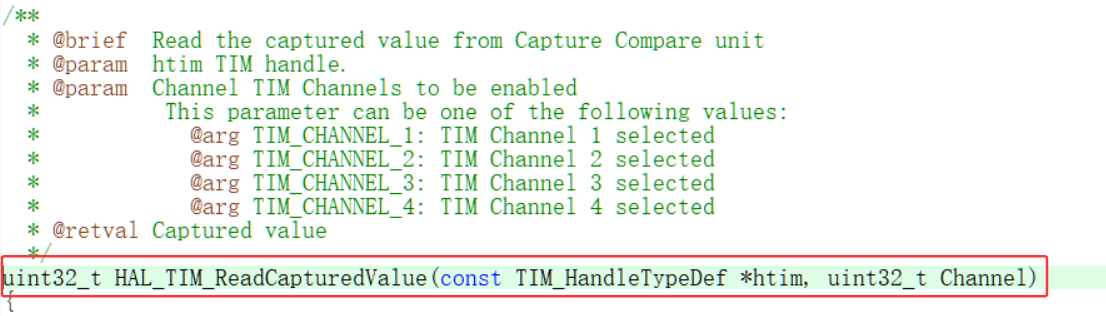
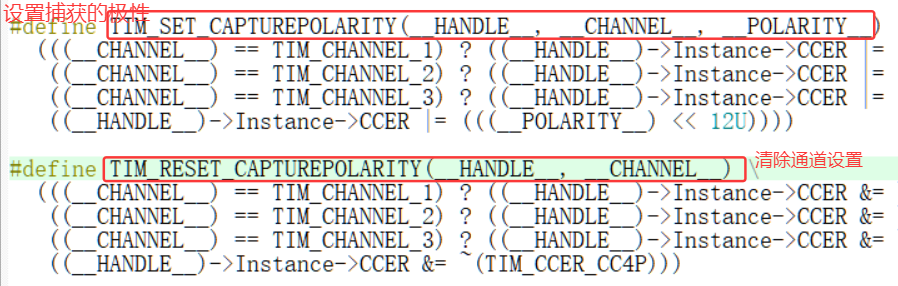
清除/设置 捕获的通道极性:
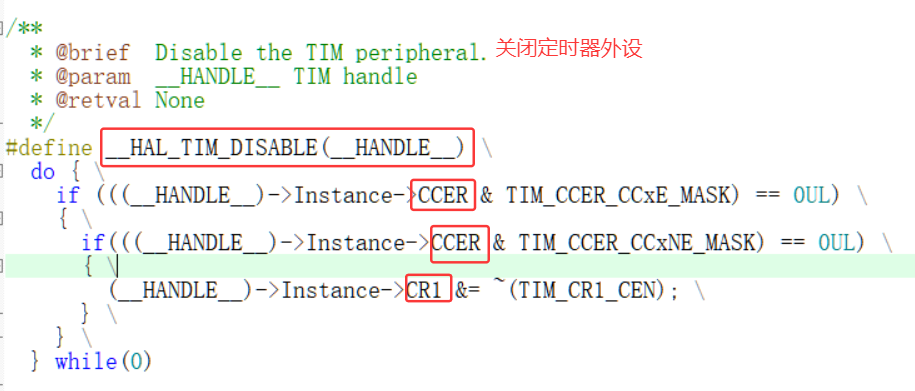
关闭定时器:
设置计数器的值 :

获取计数器的值:

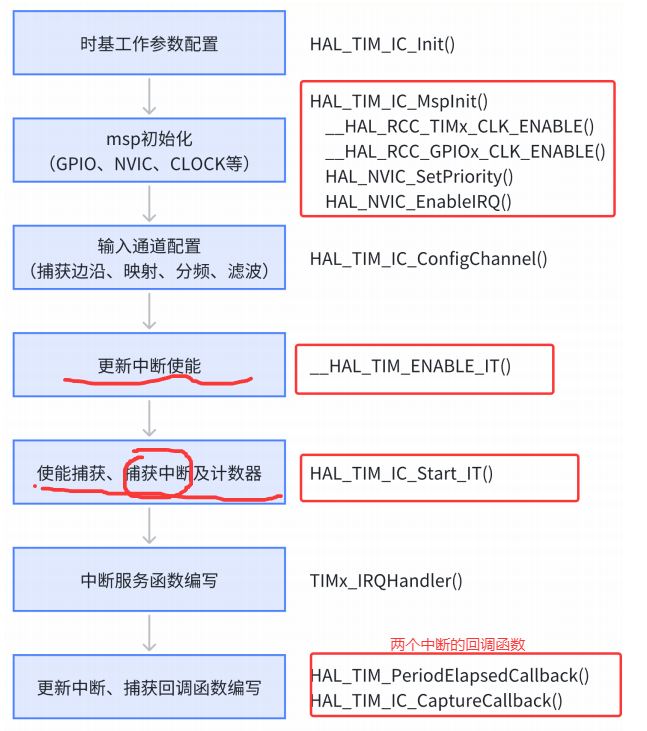
定时器输入捕获实验步骤配置
小实验:测量按键按下的时长(测量脉冲宽度)
实验目的:使用定时器 2 通道 2 (PA1)来捕获 按键 2 (PA1)按下时间,并通过串口打印。

- 计一个数的时间:1us,PSC=71,ARR=65535
- 下降沿捕获、输入通道 2 映射在 TI2 上、不分频、不滤波。
硬件清单:开发板、ST-Link、USB转TTL
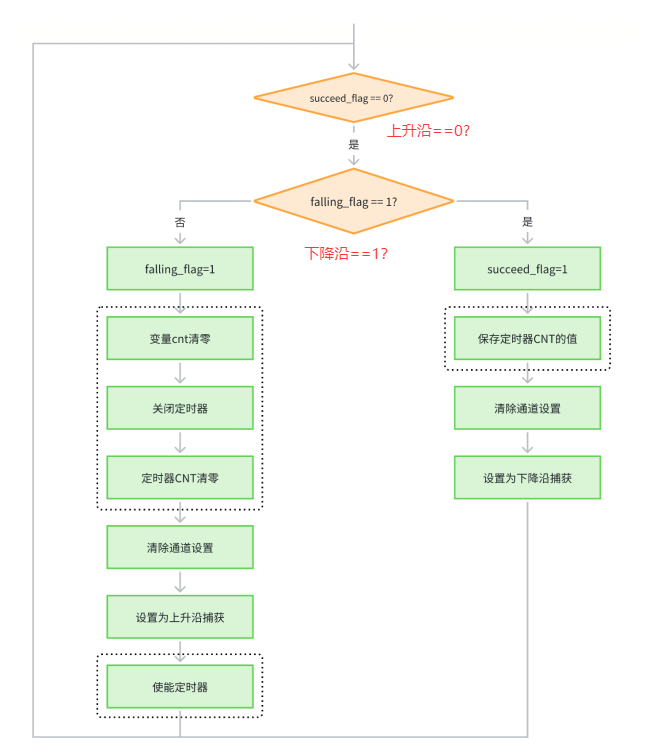
思路:
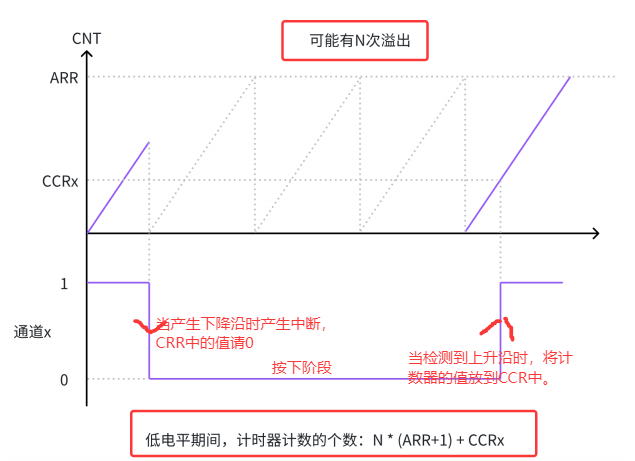
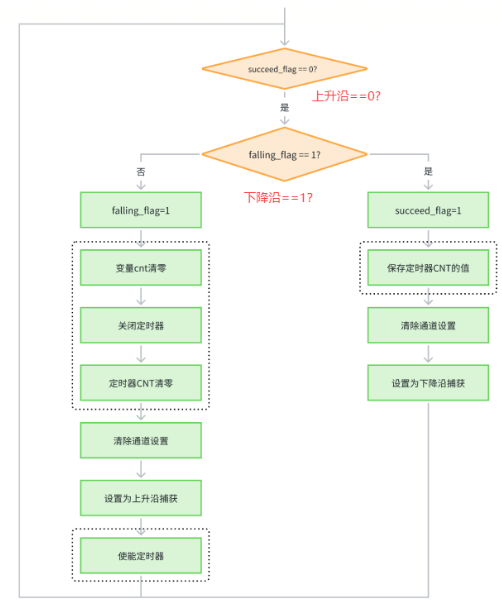
输入捕获回调函数中的流程图:
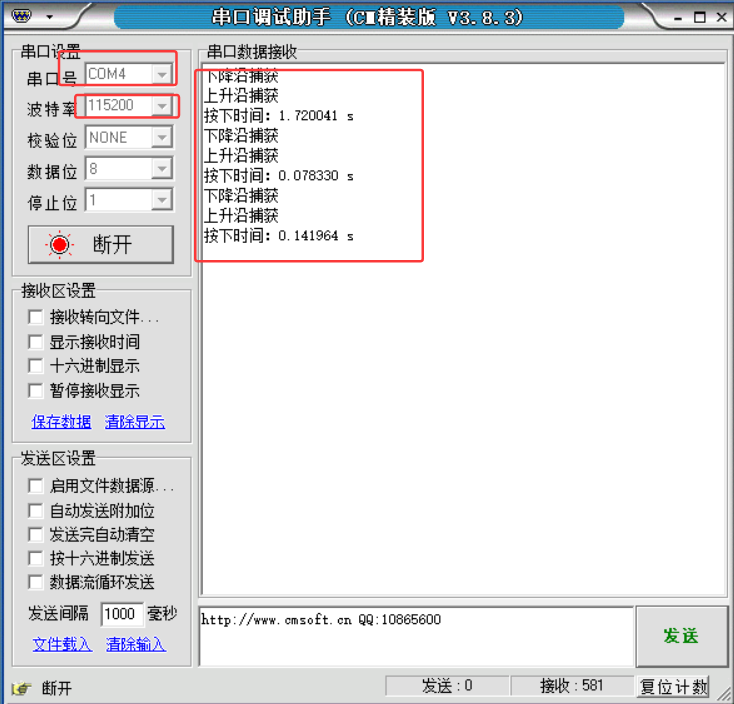
拓展:串口打印功能
- 利用串口调试助手:
- 引脚接线:
| USB转TTL | 开发板(型号不同,引脚不同) |
| TXD | RX1(PA10) |
| RXD | TX1(PA9) |
| GND | GND |
- 相关代码和配置:
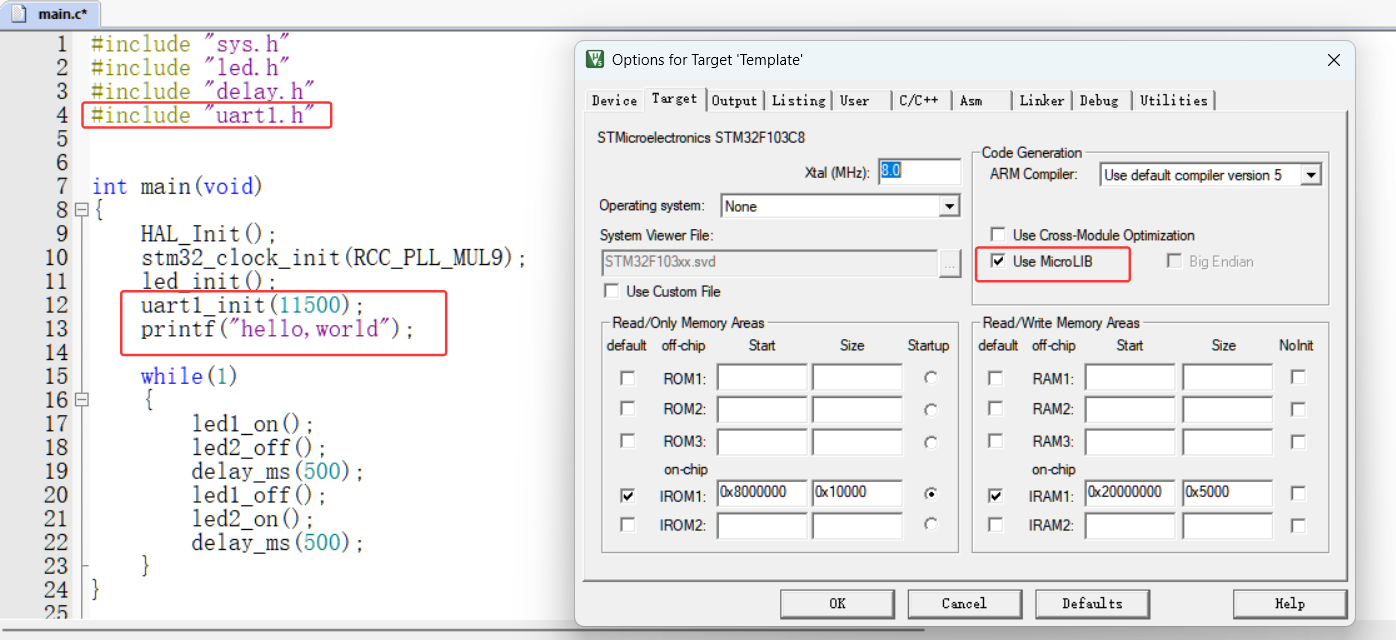
注意事项:
- 代码中的波特率要和串口助手中的波特率设置的相同,例如:9600 或 115200;
- 上述代码中设置错了!!!
实验1:捕获一次下降沿
- ic.c代码文件
#include "ic.h"
#include "stdio.h"TIM_HandleTypeDef ic_handle = {0};
//初始化时基单元
void ic_init(uint16_t psc,uint16_t arr){ic_handle.Instance = TIM2;ic_handle.Init.Period = arr;ic_handle.Init.Prescaler = psc;ic_handle.Init.CounterMode = TIM_COUNTERMODE_UP;HAL_TIM_IC_Init(&ic_handle);//输入通道的配置TIM_IC_InitTypeDef ic_initstruct = {0};ic_initstruct.ICFilter = 0; //滤波ic_initstruct.ICPolarity = TIM_ICPOLARITY_FALLING; //输入极性的判断ic_initstruct.ICPrescaler = TIM_ICPSC_DIV1; //分频系数:这里不分频ic_initstruct.ICSelection = TIM_ICSELECTION_DIRECTTI; //输入通道选择,还有TRC输入口HAL_TIM_IC_ConfigChannel(&ic_handle,&ic_initstruct,TIM_CHANNEL_2);//打开计数器,是能更新中断,输入捕获中断__HAL_TIM_ENABLE_IT(&ic_handle,TIM_IT_UPDATE);HAL_TIM_IC_Start_IT(&ic_handle,TIM_CHANNEL_2);
}//初始化msp函数
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim){if(htim->Instance == TIM2){//打开时钟__HAL_RCC_TIM2_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();//初始化GPIO口GPIO_InitTypeDef gpio_initstruct;gpio_initstruct.Mode = GPIO_MODE_INPUT;gpio_initstruct.Pin = GPIO_PIN_1;gpio_initstruct.Pull = GPIO_PULLUP;gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA,&gpio_initstruct);//初始化NVICHAL_NVIC_SetPriority(TIM2_IRQn,2,2);HAL_NVIC_EnableIRQ(TIM2_IRQn);}
}//中断服务函数
void TIM2_IRQHandler(void){HAL_TIM_IRQHandler(&ic_handle);
}
//捕获中断的回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){ printf("下降沿触发\n");
}
- ic.h文件代码
#ifndef __IC_H__
#define __IC_H__
#include "stm32f1xx.h"void ic_init(uint16_t psc,uint16_t arr);#endif
- main.c文件代码
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "uart1.h"
#include "ic.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */uart1_init(115200); //初始化串口。设置波特率115200printf("hello,world!!!\n"); //打印到串口助手ic_init(72-1,65536-1); //设置中断溢出时长while(1){ led1_on();led2_off();delay_ms(500);led1_off();led2_on();delay_ms(500);}
}实验2:捕获一次完整的按键,并打印出按键按下的时长
- ic.h文件代码
- 根据上面流程图,写捕获中断的回调函数
#include "ic.h"
#include "stdio.h"
#include "string.h"struct {uint8_t falling_flag;uint8_t success_flag;uint16_t timeout_cnt;
}capture_status = {0};uint16_t time_cnt = 0;TIM_HandleTypeDef ic_handle = {0};
//初始化时基单元
void ic_init(uint16_t psc,uint16_t arr){ic_handle.Instance = TIM2;ic_handle.Init.Period = arr;ic_handle.Init.Prescaler = psc;ic_handle.Init.CounterMode = TIM_COUNTERMODE_UP;HAL_TIM_IC_Init(&ic_handle);//输入通道的配置TIM_IC_InitTypeDef ic_initstruct = {0};ic_initstruct.ICFilter = 0; //滤波ic_initstruct.ICPolarity = TIM_ICPOLARITY_FALLING; //输入极性的判断ic_initstruct.ICPrescaler = TIM_ICPSC_DIV1; //分频系数:这里不分频ic_initstruct.ICSelection = TIM_ICSELECTION_DIRECTTI; //输入通道选择,还有TRC输入口HAL_TIM_IC_ConfigChannel(&ic_handle,&ic_initstruct,TIM_CHANNEL_2);//打开计数器,是能更新中断,输入捕获中断__HAL_TIM_ENABLE_IT(&ic_handle,TIM_IT_UPDATE); //使能更新中断HAL_TIM_IC_Start_IT(&ic_handle,TIM_CHANNEL_2); //打开计时器,并使能捕获中断
}//初始化msp函数
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim){if(htim->Instance == TIM2){//打开时钟__HAL_RCC_TIM2_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();//初始化GPIO口GPIO_InitTypeDef gpio_initstruct;gpio_initstruct.Mode = GPIO_MODE_INPUT;gpio_initstruct.Pin = GPIO_PIN_1;gpio_initstruct.Pull = GPIO_PULLUP;gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA,&gpio_initstruct);//初始化NVICHAL_NVIC_SetPriority(TIM2_IRQn,2,2);HAL_NVIC_EnableIRQ(TIM2_IRQn);}
}//中断服务函数
void TIM2_IRQHandler(void){HAL_TIM_IRQHandler(&ic_handle);
}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){
// printf("下降沿触发\n");if(capture_status.success_flag == 0){if(capture_status.falling_flag == 1){printf("上升沿捕获\n");capture_status.success_flag =1;time_cnt = HAL_TIM_ReadCapturedValue(&ic_handle,TIM_CHANNEL_2);//获取计数器的值TIM_RESET_CAPTUREPOLARITY(&ic_handle,TIM_CHANNEL_2); //清除捕获通道TIM_SET_CAPTUREPOLARITY(&ic_handle,TIM_CHANNEL_2,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获}else{printf("下降沿捕获\n");capture_status.falling_flag = 1;capture_status.timeout_cnt = 0;__HAL_TIM_DISABLE(&ic_handle);__HAL_TIM_SetCounter(&ic_handle,0); //计数器的值清零TIM_RESET_CAPTUREPOLARITY(&ic_handle,TIM_CHANNEL_2); //清除通道设置TIM_SET_CAPTUREPOLARITY(&ic_handle,TIM_CHANNEL_2,TIM_ICPOLARITY_RISING); //设置为上升沿捕获__HAL_TIM_ENABLE(&ic_handle);}}
}
//定时器定时中断的回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){if(htim ->Instance == TIM2){//判断是否完成按键if(capture_status.falling_flag == 1) //判断是否捕获到下降沿capture_status.timeout_cnt ++; }
}//定义一个函数,打印按键按下的时间
void pressed_time_get(void){if(capture_status.success_flag == 1){printf("按下时间:%lf s \n",((double)capture_status.timeout_cnt*65536+time_cnt)/1000000);memset(&capture_status,0,sizeof(capture_status));}}
- ic.h文件代码
#ifndef __IC_H__
#define __IC_H__
#include "stm32f1xx.h"void ic_init(uint16_t psc,uint16_t arr);
void pressed_time_get(void);
#endif
- main.c文件代码
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "uart1.h"
#include "ic.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */uart1_init(115200);printf("hello,world!!!\n");ic_init(72-1,65536-1);while(1){ pressed_time_get();}
}要解决的问题:
- 结构体中声明多个标志位。
- 用到的函数。
- 为什么要写到while函数中。
脉冲计数
简介
脉冲计数相关的函数
初始化函数
![]()
![]()
打开捕获定时器
![]()
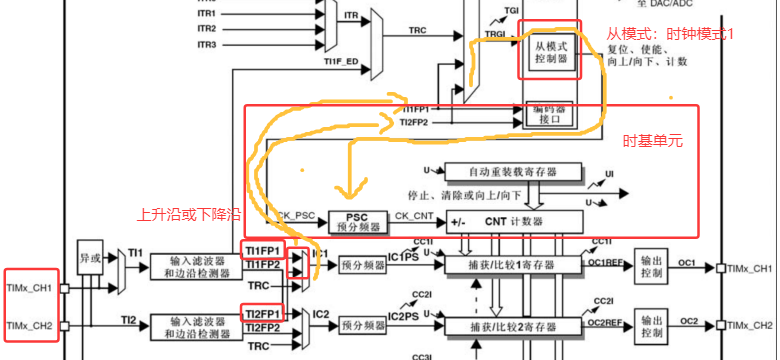
定时器从模式的配置:通道、滤波、边沿捕获、映射

获取CNT的值
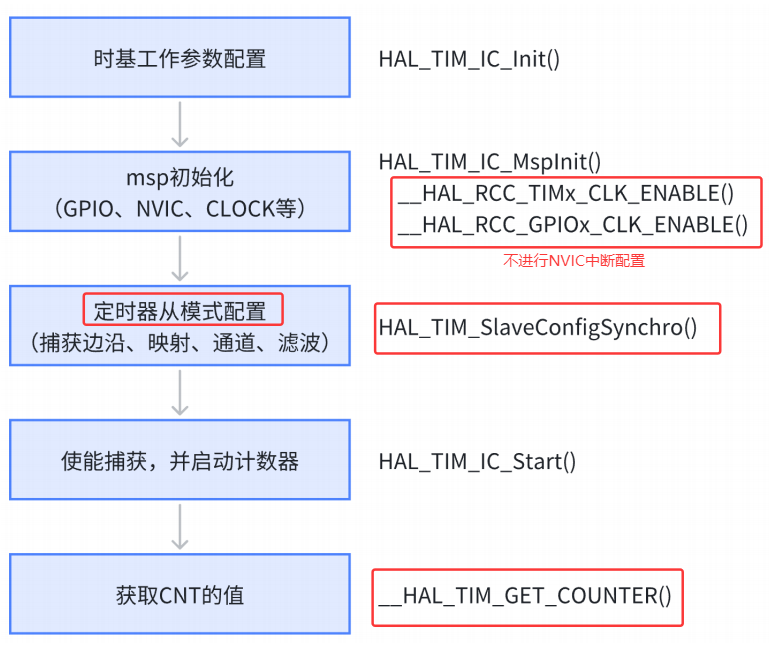
脉冲计数实验步骤配置
根据上面的框图:
小实验:脉冲计数实验 (测量频率)
实验目的:将定时器 2 通道 2 输入(PA1)的低电平脉冲(按下按键2 PA1)作为定时器 2 的时钟,并通过串口打印脉冲数。
- PSC=1-1,ARR=65536-1
- 外部时钟模式1、触发选择:下降沿触发、不分频、不滤波
实验清单:开发板、ST-Link、USB转TTL
实验思路:
- 初始化时基单元;
- 配置输入通道,从模式:时钟模式1;
- msp函数初始化GPIO口、CLOCK、NVIC;
- 打开计数器;
- 获取计数器的值并进行打印。
- counter.c文件代码
#include "counter.h"
#include "stdio.h"TIM_HandleTypeDef counter_handle = {0};void counter_init(uint16_t psc,uint16_t arr){//初始化时基单元counter_handle.Instance = TIM2;counter_handle.Init.Prescaler = psc;counter_handle.Init.Period = arr;counter_handle.Init.CounterMode = TIM_COUNTERMODE_UP;counter_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;HAL_TIM_IC_Init(&counter_handle);//配置输入通道(从模式)TIM_SlaveConfigTypeDef counter_initstruct;counter_initstruct.TriggerFilter = 0; //滤波器counter_initstruct.TriggerPolarity = TIM_TRIGGERPOLARITY_FALLING; //极性的选择:上升沿或下降沿counter_initstruct.SlaveMode = TIM_SLAVEMODE_EXTERNAL1; //从模式的选择counter_initstruct.InputTrigger = TIM_TS_TI2FP2; //输入的通道。counter_initstruct.TriggerPrescaler = TIM_TRIGGERPRESCALER_DIV1; //分频:这里用不到HAL_TIM_SlaveConfigSynchro(&counter_handle,&counter_initstruct);//使能中断和打开时钟HAL_TIM_IC_Start(&counter_handle,TIM_CHANNEL_2);
}//msp配置mcu外设
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim){ //这是个公用的函数,用的时候要进行判断是否被占用if(htim->Instance == TIM2){//打开时钟__HAL_RCC_TIM2_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();//初始化GPIO口GPIO_InitTypeDef gpio_initstruct;gpio_initstruct.Pin = GPIO_PIN_1;gpio_initstruct.Mode = GPIO_MODE_INPUT;gpio_initstruct.Pull = GPIO_NOPULL;gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA,&gpio_initstruct);}
}//获取计数器的值
uint16_t Ncounter_num = 0;
uint16_t Ocounter_num = 0;
void counter_get(void){Ncounter_num = __HAL_TIM_GetCounter(&counter_handle);
//避免在while循环中一直打印计数器的值,设置打印的条件:计数器的值是否发生变化。if(Ncounter_num != Ocounter_num){printf("计数器的值:%d\n",Ncounter_num);Ocounter_num = Ncounter_num;}
}- counter.h文件代码
#ifndef __COUNTER_H__
#define __COUNTER_H__#include "stm32f1xx.h"
void counter_init(uint16_t psc,uint16_t arr);
void counter_get(void);
#endif
- main.c文件代码
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "uart1.h"
#include "counter.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */uart1_init(115200);printf("hello,world!!!\n");counter_init(1-1,65536-1);while(1){ counter_get();}
}- 结果:

遇到的问题和注意事项:
- main.c文件中的波特率要和串口助手的波特率相同。
- 在counter.c文件中声明函数获取计数器的值时,要进行条件编译,不然会在主函数while循环中,一直打印。 (给打印函数一个条件)
- 要使能输入和打开计数器。这个函数没有捕获中断。