DDS(数据分发服务)原理详解
DDS(Data Distribution Service)是一种面向实时系统的数据分发中间件标准,它采用发布-订阅模式实现高效、可靠的数据通信。以下是DDS的核心原理和工作机制的详细解析:
一、DDS架构概述
DDS采用去中心化的分布式架构,主要包含以下核心组件:
-
Domain(域)
-
通信的基本隔离单元,不同域的参与者无法直接通信
-
通过Domain ID区分(通常为0-232范围内的整数)
-
-
DomainParticipant(域参与者)
-
应用程序接入DDS网络的入口点
-
每个参与者可以包含多个发布者和订阅者
-
-
Topic(主题)
-
数据分类的基本单位,由名称和数据类型定义
-
例如:"TemperatureSensorData"主题可能包含温度值和时间戳
-
-
Publisher(发布者)/Subscriber(订阅者)
-
发布者负责发送数据,订阅者接收感兴趣的数据
-
支持一对多、多对多的通信模式
-
-
DataWriter(数据写入器)/DataReader(数据读取器)
-
实际执行数据读写的端点
-
一个发布者可以包含多个DataWriter,一个订阅者可以包含多个DataReader
-
二、核心通信机制
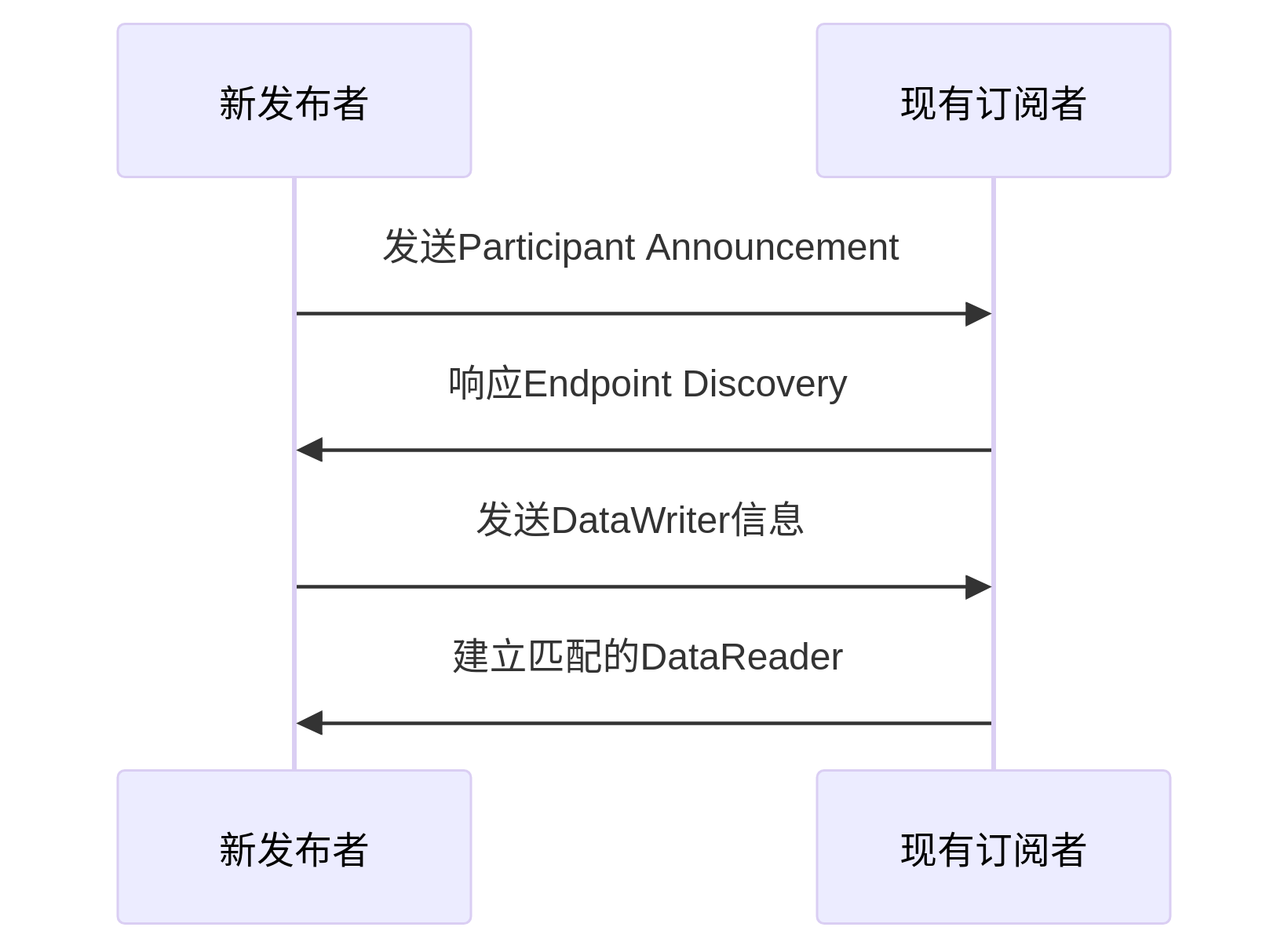
1. 发现协议(Discovery Protocol)
DDS采用自动发现机制,无需中央服务器:
-
参与者发现:新加入的DomainParticipant会广播自身信息
-
端点发现:DataWriter和DataReader相互发现匹配的通信对端
-
基于UDP多播:默认使用多播实现高效发现(也可配置为单播)
发现过程示例:
2. 数据分发模型
DDS提供丰富的QoS(服务质量)策略控制数据传输:
| QoS策略 | 说明 | 典型配置 |
|---|---|---|
| 可靠性(Reliability) | BEST_EFFORT(尽力而为)或RELIABLE(可靠) | 关键数据用RELIABLE |
| 持久性(Durability) | VOLATILE(易失)/TRANSIENT_LOCAL(临时本地)/PERSISTENT(持久) | 新订阅者获取历史数据用TRANSIENT_LOCAL |
| 截止时间(Deadline) | 数据发布的周期约束 | 设置预期更新频率 |
| 生命周期(Liveliness) | 检测参与者活跃状态 | AUTOMATIC(自动)/MANUAL_BY_PARTICIPANT(手动) |
| 历史记录(History) | 控制缓存的数据量 | KEEP_LAST(保留最新N个)/KEEP_ALL(保留全部) |
3. 数据流处理流程
-
发布端:
-
应用调用DataWriter.write()
-
DDS序列化数据并放入发送队列
-
根据QoS策略选择传输方式(UDP/TCP/共享内存等)
-
执行流量控制和拥塞避免
-
-
接收端:
-
网络层接收数据包
-
反序列化并验证数据完整性
-
根据订阅条件和QoS过滤数据
-
将有效数据放入接收队列
-
通知应用程序通过DataReader.read()获取数据
-
传输方式性能对比
| 传输方式 | 延迟(μs) | 吞吐量(Gbps) | 可靠性 | 适用场景 |
|---|---|---|---|---|
| 共享内存 | 0.1-1 | 10+ | 可靠 | 同主机IPC |
| UDP多播 | 10-100 | 1-10 | 可选 | 局域网广播 |
| UDP单播 | 50-200 | 0.1-1 | 可选 | 点对点实时 |
| TCP | 1000+ | 0.1-0.5 | 强制可靠 | 广域网通信 |
| DTLS | 200-500 | 0.05-0.2 | 可靠加密 | 安全传输 |
传输选择决策树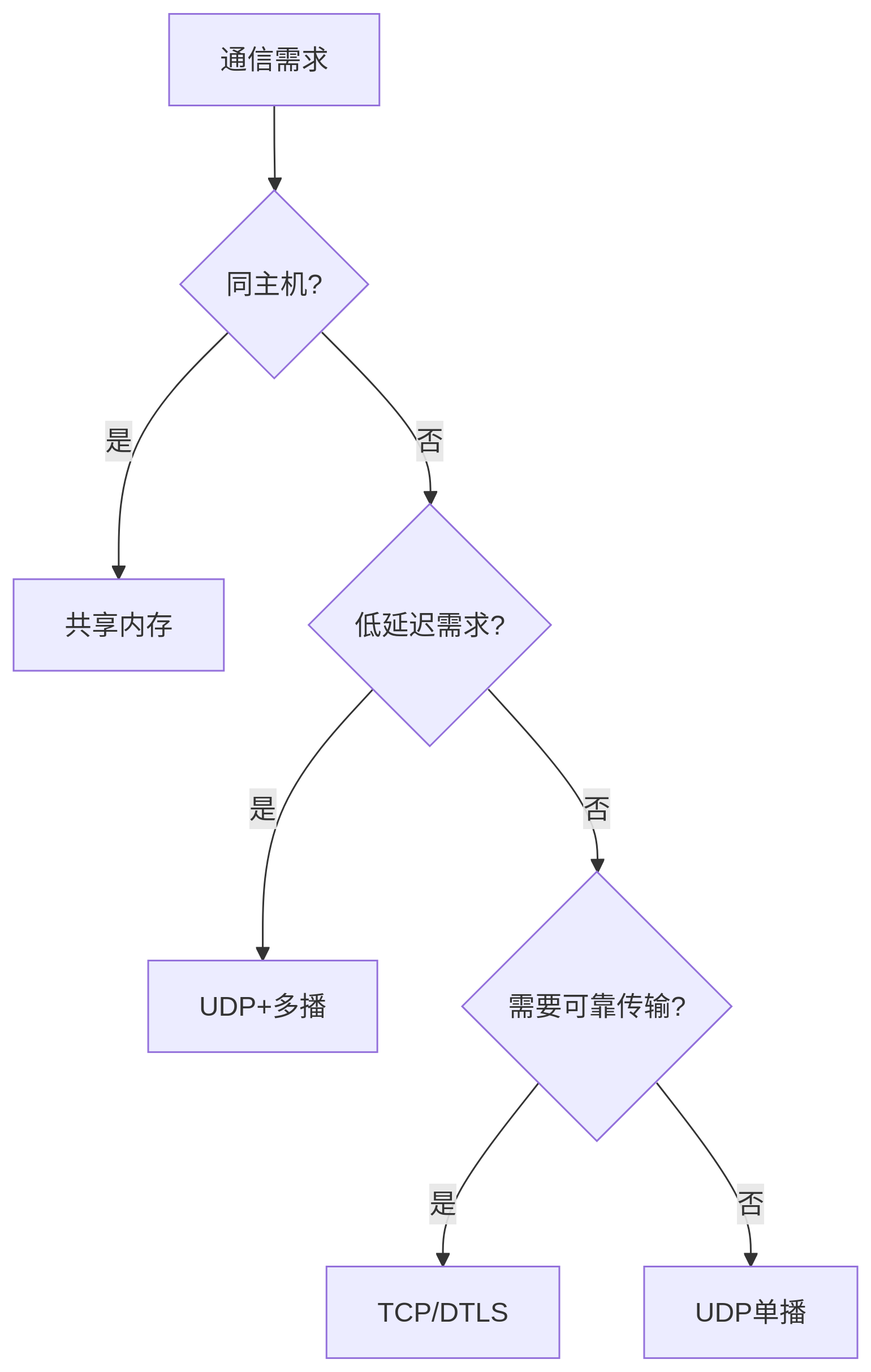
如果DDS是在同一台系统/设备内使用的话,最优先选择的传输方式就是共享内存(Shared Memory Transport)。
为什么系统内部推荐用共享内存?
延迟最低:
内存级访问速度,几微秒(μs)级别延迟。
比走Loopback TCP/IP(127.0.0.1)快很多倍。
吞吐量最高:
直接在物理内存里搬数据。
不需要真正的socket堆栈、不需要拷贝网络包。
资源占用更少:
不走协议栈,不要占用TCP/IP的系统buffer。
CPU开销也比socket要小很多。
内存复制最小化(Zero Copy)(不同DDS厂商实现细节不同,但趋势一致):
有些DDS实现能做到发布者写一次,订阅者直接读(或者通过小拷贝+指针切换实现)。
各大主流DDS实现都怎么做?
DDS实现 系统内部默认行为 说明 RTI Connext DDS 自动优先用共享内存,fallback到UDP/TCP 共享内存叫"shmem transport" Fast DDS (eProsima) 有Shared Memory Transport模块(默认配置要启用) 需要配置开启 Cyclone DDS 默认开启共享内存支持 自动内部选择 OpenDDS 支持共享内存传输 需要编译启用SharedMemory transport
三、关键技术特性
1. 实时数据分发
-
零拷贝架构:通过共享内存减少数据复制
-
低延迟传输:典型延迟在微秒级
-
确定性传输:支持时间触发通信模式
2. 动态发现与匹配
-
基于内容过滤:使用SQL-like语法订阅特定数据
// 示例:只接收温度>30度的数据
ContentFilteredTopic cft = subscriber.create_contentfilteredtopic("HighTemp", temperatureTopic, "value > 30");- 主题别名:允许动态重定向数据流
3. 容错机制
-
心跳检测:通过Liveliness监控参与者状态
-
冗余网络:支持多网卡冗余传输
-
故障切换:快速检测和恢复机制
四、DDS与ROS2的集成
ROS2采用DDS作为底层通信中间件,关键集成点:
-
RMW层(ROS MiddleWare Interface)
-
抽象层,支持多种DDS实现(Fast DDS、Cyclone DDS、RTI Connext等)
-
提供DDS到ROS消息的转换
-
-
Topic映射规则
-
ROS Topic → DDS Topic
-
ROS Node → DDS DomainParticipant
-
ROS Publisher → DDS DataWriter
-
ROS Subscription → DDS DataReader
-
-
QoS配置
ROS2提供预定义的QoS策略集:
# ROS2 QoS配置示例
from rclpy.qos import QoSProfile, QoSReliabilityPolicyqos = QoSProfile(reliability=QoSReliabilityPolicy.RELIABLE,depth=10
)
publisher = node.create_publisher(Image, "camera_image", qos)五、典型DDS实现比较
| 实现方案 | 特点 | 适用场景 |
|---|---|---|
| RTI Connext DDS | 商业版,功能最全,认证齐全 | 航空、医疗等安全关键领域 |
| Eclipse Cyclone DDS | 开源,轻量级,符合DDSI-RTPS标准 | 嵌入式设备,资源受限系统 |
| eProsima Fast DDS | 开源,性能优异,与ROS2深度集成 | 机器人,科研项目 |
| OpenDDS | 开源,基于ACE/TAO框架 | 传统企业系统 |
六、性能优化技巧
-
选择合适的QoS:
-
实时数据使用BEST_EFFORT + 小历史缓存
-
关键指令使用RELIABLE + 确认机制
-
-
调整网络参数:
<!-- Fast DDS配置示例 -->
<transport_descriptors><udp transport="udp"><non_blocking_send>true</non_blocking_send><maxMessageSize>65536</maxMessageSize></udp>
</transport_descriptors>-
利用共享内存:
-
同一主机上的通信优先使用共享内存传输
-
减少序列化/反序列化开销
-
DDS的这些特性使其特别适合分布式实时系统,如自动驾驶、工业控制、机器人等对通信质量和实时性要求高的领域。